




 广告
广告





















































基于线性变参数系统的四轮转向自主地面车辆路径跟踪控制及实验验证
2021-09-12 10:45:58· 来源:同济智能汽车研究所

4 路径跟踪控制器的设计
图4显示了四轮转向AGV的控制系统结构。可以发现,控制系统主要由纵向运动控制和路径跟踪控制两部分组成。由于纵向运动控制不是本文的主要研究内容,这里就不介绍了,读者可以在之前的工作中看到。本文主要关注路径跟踪算法设计。四轮转向AGV的目标路径信息和实际位置被设置为路径跟踪控制器的输入。然后,转向角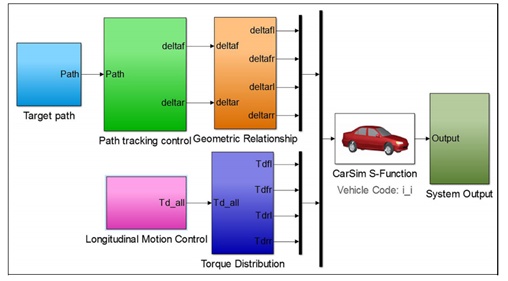 和
和 可以被路径跟踪控制器计算出。
可以被路径跟踪控制器计算出。
和可以被路径跟踪控制器计算出。
图4 四轮转向AGV的控制系统结构
基于阿克曼转向几何,可以计算出每个车轮的转向角,并将其发送给电子控制单元。电子控制单元将控制四个线控转向系统跟踪目标转向角。之后,四轮转向AGV可以实现路径跟踪控制。
A.LQR控制器设计
如上所述,所设计的用于路径跟踪的LQR控制器旨在最小化偏航角误差 和横向位置误差
和横向位置误差 。因此,状态反馈LQR控制器设计的性能指标定义为
。因此,状态反馈LQR控制器设计的性能指标定义为
如上所述,所设计的用于路径跟踪的LQR控制器旨在最小化偏航角误差
和横向位置误差。因此,状态反馈LQR控制器设计的性能指标定义为
其中Q和R是对角加权矩阵,Q是半正定矩阵,R是正定矩阵。
然后,哈密顿函数由下式给出

其中是拉格朗日乘子向量。
是拉格朗日乘子向量。


 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
