




 广告
广告





















































SAE J3016:驾驶自动化分级(2021年4月,中文版)
2021-05-25 00:16:42· 来源:北京市高级别自动驾驶示范区

3.7.3全行程功能
整个行程中操作车辆的ADS功能。
示例1:4级ADS-DV采用无人驾驶运行,为其地理围栏运营区域内的客户提供网约车服务。
示例2:一辆5级双模车辆由车主以无人驾驶方式派往指定机场,接送几名家属回家。在整个返程过程中,所有车辆乘员均是乘客。
图1说明了如何通过使用驾驶自动化不同级别的驾驶自动化功能的各种组合来完成行程。
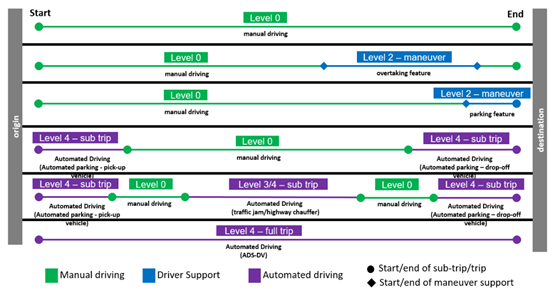
图1-在给定行程中可用的驾驶自动化系统功能/类型示例
3.8
驾驶员支持[驾驶自动化系统]功能
1级和2级驾驶自动化系统功能的通用术语。
注:1级(驾驶员辅助)和2级(部分自动化)功能只能执行部分DDT,因此需要驾驶员执行DDT的其余部分,并在启用时监督功能执行情况。因此,这些功能在启用时支持但不取代驾驶员执行DDT。
3.9
[装有ADS车辆的]无人驾驶操作
未被占用或车载用户不是驾驶员或车内后备就绪用户的装有ADS车辆的道路运行。
注1:ADS-DV始终以无人驾驶方式调度(以3.33.3中的注3为准)。
注2:配备ADS的双模车辆可无人驾驶方式调度。
注3:车上乘客既不是驾驶员,也非后备用户。
示例:为提供运输服务,4级ADS-DV以无人驾驶方式调度。
3.10
动态驾驶任务(DDT)
在道路交通中操作车辆所需的所有实时操作和策略功能,不包括行程安排和目的地和航路点选择等战略功能,包括但不限于以下子任务:
1.通过转向控制车辆横向运动(操作)。
2.通过加速和减速进行车辆纵向运动控制(操作)。
3.通过目标和事件检测、识别、分类和响应准备(操作和策略)监控驾驶环境。
4.对象和事件响应执行(操作和策略)。
5.机动规划(策略)。
6.通过灯光、鸣笛、信号、手势等增强醒目性(策略)。
注1:某些驾驶自动化系统(或配备这些系统的车辆)可能具有在前进和后退之间改变车辆纵向运动控制的方法。
注2:为了简化和提供有用的速记术语,子任务(3)和(4)统称为对象和事件检测与响应(OEDR)(见3.19)。
注3:在本文件中,提及“完成DDT”。这意味着完全执行DDT的所有子任务,无论该角色是由(人工)驾驶员、驾驶自动化系统或两者的组合来完成。
注4:图2显示了驾驶任务的示意图。有关驾驶的操作、战术和战略功能之间差异的更多信息,请参见8.11。
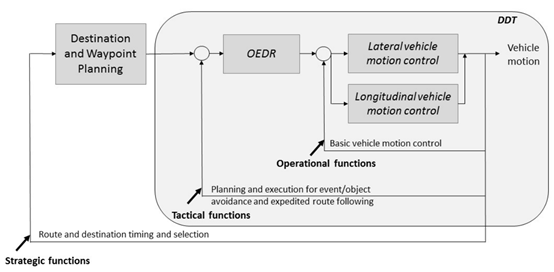
图2-显示DDT部分的驾驶任务示意图(非控制图)
就执行动态驾驶任务(DDT)目的而言,1级驾驶自动化包括最内环部分的自动化(即,车辆横向运动控制功能或车辆纵向运动控制功能以及与给定车辆运动控制轴相关的有限OEDR);2级驾驶自动化包括最内环的自动化(车辆横向和纵向运动控制以及与车辆运动控制相关的有限OEDR),3至5级驾驶自动化包括两个内环的自动化(车辆横向和纵向运动控制以及完整OEDR)。注意,执行DDT不包括驾驶的战略方面(例如,决定是否、何时及何地出行)。
3.11
故障缓解策略
一种车辆功能(非ADS功能),设计用于自动使配备ADS车辆在以下路径中受控停车:(1)在ADS发出干预请求后,3级ADS功能的后备就绪用户执行后备的长期故障,或(2)发生系统故障或外部事件,其严重程度导致ADS丧失能力,ADS无法再执行车辆运动控制以执行后备支援并实现最小风险条件(见8.6。)
注意:如果驾驶员在干预过程中没有指示他/她继续监督功能性能,则某些配备2级驾驶员支持功能的车辆可能被设计为将车辆制动至完全停止。尽管这在功能上类似于上面定义的故障缓解策略,但术语“故障缓解策略”是为不需驾驶员监督的ADS功能保留的。
3.12
[动态驾驶任务(DDT)]后备
在相同的情况下,用户对执行DDT或达到最低风险条件的响应(1)在发生执行DDT相关系统故障后,或(2)在运行设计域(ODD)退出时,或ADS对达到最低风险条件的响应。
注1:DDT和DDT后备是不同的功能,执行其中一项的能力并不一定意味着执行另一项的能力。因此,能够在ODD范围内执行整个DDT的3级ADS可能无法在所有需要的情况下执行DDT后备,因此将在必要时向DDT后备就绪用户发出干预请求(见图3至图6)。
注2:在某些情况下,如存在无障碍物的相邻路肩时,某些3级功能可设计为自动执行后备并实现最小风险条件,但在其他情况下,如无此类路肩时,则不适用。因此,级别3的划分并不限制ADS自动实现最小风险条件,但不能保证在其ODD范围内的所有情况下自动实现最小风险条件。此外,在某些(但不是所有)情况下实现自动化最小风险条件并不构成4级功能。
注3:在第3级,ADS能够在向后备就绪用户提供干预请求后,继续执行DDT至少几秒钟。然后,DDT后备就绪用户应恢复手动车辆操作,或在其认为必要时实现最低风险条件。
注4:在第4级和第5级,ADS必须能够执行DDT后备支援,并达到最低风险条件。4级和5级ADS车辆的设计也能适应驾驶员的操作(无论是在车内还是远程),如果用户选择这样做(见图7和图8),当情况允许安全地进行DDT后备时,可以允许用户执行DDT支援。然而,4级或5级ADS不需要设计为允许用户执行DDT支援,实际上,也可以设计为不允许,以降低车祸风险(见8.9)。
注5:当4级或5级ADS执行DDT后备时,其速度和/或横向和/或纵向车辆运动控制范围的设计可能会受到限制(即它可能进入所谓的“跛行模式”)。
注6:在执行DDT后备时,ADS可在其ODD之外临时运行(见3.21注1)。
示例1:1级自适应巡航控制(ACC)功能遇到系统故障,导致该功能停止执行其预期功能。人工驾驶员通过执行完整DDT来执行DDT支援。
示例2:在高速公路交通堵塞期间执行整个DDT的3级ADS功能在遇到车祸场景时无法执行,因此会向DDT后备用户发出干预请求。他/她通过接管执行整个DDT以便在车祸现场周围灵活机动(见图4)(请注意,在本例中,不需要或实现最小风险条件。)
整个行程中操作车辆的ADS功能。
示例1:4级ADS-DV采用无人驾驶运行,为其地理围栏运营区域内的客户提供网约车服务。
示例2:一辆5级双模车辆由车主以无人驾驶方式派往指定机场,接送几名家属回家。在整个返程过程中,所有车辆乘员均是乘客。
图1说明了如何通过使用驾驶自动化不同级别的驾驶自动化功能的各种组合来完成行程。
图1-在给定行程中可用的驾驶自动化系统功能/类型示例
3.8
驾驶员支持[驾驶自动化系统]功能
1级和2级驾驶自动化系统功能的通用术语。
注:1级(驾驶员辅助)和2级(部分自动化)功能只能执行部分DDT,因此需要驾驶员执行DDT的其余部分,并在启用时监督功能执行情况。因此,这些功能在启用时支持但不取代驾驶员执行DDT。
3.9
[装有ADS车辆的]无人驾驶操作
未被占用或车载用户不是驾驶员或车内后备就绪用户的装有ADS车辆的道路运行。
注1:ADS-DV始终以无人驾驶方式调度(以3.33.3中的注3为准)。
注2:配备ADS的双模车辆可无人驾驶方式调度。
注3:车上乘客既不是驾驶员,也非后备用户。
示例:为提供运输服务,4级ADS-DV以无人驾驶方式调度。
3.10
动态驾驶任务(DDT)
在道路交通中操作车辆所需的所有实时操作和策略功能,不包括行程安排和目的地和航路点选择等战略功能,包括但不限于以下子任务:
1.通过转向控制车辆横向运动(操作)。
2.通过加速和减速进行车辆纵向运动控制(操作)。
3.通过目标和事件检测、识别、分类和响应准备(操作和策略)监控驾驶环境。
4.对象和事件响应执行(操作和策略)。
5.机动规划(策略)。
6.通过灯光、鸣笛、信号、手势等增强醒目性(策略)。
注1:某些驾驶自动化系统(或配备这些系统的车辆)可能具有在前进和后退之间改变车辆纵向运动控制的方法。
注2:为了简化和提供有用的速记术语,子任务(3)和(4)统称为对象和事件检测与响应(OEDR)(见3.19)。
注3:在本文件中,提及“完成DDT”。这意味着完全执行DDT的所有子任务,无论该角色是由(人工)驾驶员、驾驶自动化系统或两者的组合来完成。
注4:图2显示了驾驶任务的示意图。有关驾驶的操作、战术和战略功能之间差异的更多信息,请参见8.11。
图2-显示DDT部分的驾驶任务示意图(非控制图)
就执行动态驾驶任务(DDT)目的而言,1级驾驶自动化包括最内环部分的自动化(即,车辆横向运动控制功能或车辆纵向运动控制功能以及与给定车辆运动控制轴相关的有限OEDR);2级驾驶自动化包括最内环的自动化(车辆横向和纵向运动控制以及与车辆运动控制相关的有限OEDR),3至5级驾驶自动化包括两个内环的自动化(车辆横向和纵向运动控制以及完整OEDR)。注意,执行DDT不包括驾驶的战略方面(例如,决定是否、何时及何地出行)。
3.11
故障缓解策略
一种车辆功能(非ADS功能),设计用于自动使配备ADS车辆在以下路径中受控停车:(1)在ADS发出干预请求后,3级ADS功能的后备就绪用户执行后备的长期故障,或(2)发生系统故障或外部事件,其严重程度导致ADS丧失能力,ADS无法再执行车辆运动控制以执行后备支援并实现最小风险条件(见8.6。)
注意:如果驾驶员在干预过程中没有指示他/她继续监督功能性能,则某些配备2级驾驶员支持功能的车辆可能被设计为将车辆制动至完全停止。尽管这在功能上类似于上面定义的故障缓解策略,但术语“故障缓解策略”是为不需驾驶员监督的ADS功能保留的。
3.12
[动态驾驶任务(DDT)]后备
在相同的情况下,用户对执行DDT或达到最低风险条件的响应(1)在发生执行DDT相关系统故障后,或(2)在运行设计域(ODD)退出时,或ADS对达到最低风险条件的响应。
注1:DDT和DDT后备是不同的功能,执行其中一项的能力并不一定意味着执行另一项的能力。因此,能够在ODD范围内执行整个DDT的3级ADS可能无法在所有需要的情况下执行DDT后备,因此将在必要时向DDT后备就绪用户发出干预请求(见图3至图6)。
注2:在某些情况下,如存在无障碍物的相邻路肩时,某些3级功能可设计为自动执行后备并实现最小风险条件,但在其他情况下,如无此类路肩时,则不适用。因此,级别3的划分并不限制ADS自动实现最小风险条件,但不能保证在其ODD范围内的所有情况下自动实现最小风险条件。此外,在某些(但不是所有)情况下实现自动化最小风险条件并不构成4级功能。
注3:在第3级,ADS能够在向后备就绪用户提供干预请求后,继续执行DDT至少几秒钟。然后,DDT后备就绪用户应恢复手动车辆操作,或在其认为必要时实现最低风险条件。
注4:在第4级和第5级,ADS必须能够执行DDT后备支援,并达到最低风险条件。4级和5级ADS车辆的设计也能适应驾驶员的操作(无论是在车内还是远程),如果用户选择这样做(见图7和图8),当情况允许安全地进行DDT后备时,可以允许用户执行DDT支援。然而,4级或5级ADS不需要设计为允许用户执行DDT支援,实际上,也可以设计为不允许,以降低车祸风险(见8.9)。
注5:当4级或5级ADS执行DDT后备时,其速度和/或横向和/或纵向车辆运动控制范围的设计可能会受到限制(即它可能进入所谓的“跛行模式”)。
注6:在执行DDT后备时,ADS可在其ODD之外临时运行(见3.21注1)。
示例1:1级自适应巡航控制(ACC)功能遇到系统故障,导致该功能停止执行其预期功能。人工驾驶员通过执行完整DDT来执行DDT支援。
示例2:在高速公路交通堵塞期间执行整个DDT的3级ADS功能在遇到车祸场景时无法执行,因此会向DDT后备用户发出干预请求。他/她通过接管执行整个DDT以便在车祸现场周围灵活机动(见图4)(请注意,在本例中,不需要或实现最小风险条件。)



 广告
广告 编辑推荐




最新资讯
-
开年豪掷1.8亿抢用户,又一车企加入“价格
2026-03-04 16:05
-
联合国法规R60对两轮车操纵件与指示装置的
2026-03-04 12:08
-
标准立项|《汽车异种材料铆接接头拉伸性能
2026-03-04 11:40
-
“汽车大角度座椅 第1部分:通用要求”将有
2026-03-04 11:39
-
“汽车大角度座椅 第2部分:可靠性要求”将
2026-03-04 11:39
