




 广告
广告





















































四轮驱动汽车电动助力转向控制策略研究
2021-04-08 23:33:42· 来源:汽车实用技术杂志社 作者:杨杰,冉光伟,马乐,黄楚然 单位:华南理工大学机械与汽车工程学院;广汽研究院;华南理工大学广州学院

摘 要为解决四轮驱动汽车转向轻便性和路感之间的矛盾,提出了一种基于模糊PID控制的电动助力转向控制策略。首先,建立电动助力转向系统动力学模型。然后,设计基
摘 要
为解决四轮驱动汽车转向轻便性和路感之间的矛盾,提出了一种基于模糊PID控制的电动助力转向控制策略。首先,建立电动助力转向系统动力学模型。然后,设计基于模糊PID控制方法的电动助力转向控制策略,最后,借助Matlab/Simulink进行离线仿真,验证所提控制策略的有效性。结果表明,所提控制策略能够较好地实现四轮驱动汽车的电动助力转向系统功能。
前 言
电动助力转向系统(EPS)常常要面对各种不同的使用环境,方向盘扰动、路况变化、电磁干扰、传感器信号波动及动力单位的热辐射等都会对助力转向造成潜在的干扰。所以需要寻求更为精准的控制算法。
Hyung等通过对助力特性曲线优化分析得到了三次的助力特性曲线,通过优化转矩修正助力特性,车辆回正性能、转向刚度都得到了提升。Ciarla等对EPS助力特性曲线进行研究,建立了稳态及瞬态条件下方向盘转矩和助力电机输出转矩的数学模型。江浩斌提出为兼顾直线型助力特性与曲线型助力特性的优点,把两种特性曲线组合而成一种新型助力特性曲线,满足车辆转向过程中轻便性和路感的要求。
为了兼顾四轮驱动汽车基本助力控制,解决转向轻便性与路感的矛盾,本文建立了电动助力转向系统动力学模型,根据直线型助力曲线,研究基于模糊PID控制方法的四轮驱动汽车电动助力转向控制策略,结合模糊控制和PID控制的优点,借助Matlab/Simulink进行离线仿真,验证所提控制策略的有效性。
1 电动助力转向系统动力学模型
本文选择普遍适用于轻型车辆的转向轴助力式C-EPS为研究对象,将整个电动助力转向系统分解为包括机械转向系、转向阻力系、整车模型系和助力电机系等多个模块,分别进行建模分析。
1.1 转向系统动力学模型
车辆EPS系统为转向轴助力式,对方向盘、转向器、助力电机和转向轮等进行简化,其结构如图1所示。
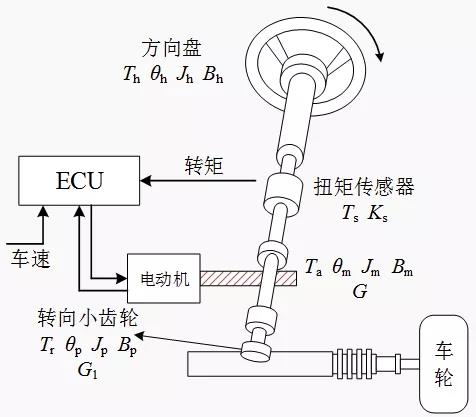 图1 转向轴助力式EPS结构简图
图1 转向轴助力式EPS结构简图
车辆行驶过程中,驾驶员通过转动方向盘,将转向意图以力的方式通过转向机构传递到车轮,实现转向,对各个力学元件受力分析,其动力学方程如下。
方向盘与扭矩传感器之间:
 (1)
(1)
式中,Th为方向盘转矩;Jh为方向盘转动惯量;Bh为方向盘阻尼系数;θh为方向盘转角;Ts为传感器转矩。
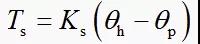
对扭矩传感器有:
 (2)
(2)
式中,Ks为扭矩传感器扭转刚度;θp为转向小齿轮转角。
扭矩传感器与转向小齿轮之间
 (3)
(3)
式中,Ta为电机助力转矩;G为电机至转向轴的传动比;Tr为作用于转向小齿轮的阻力矩;Jp为转向轴转动惯量;Bp为转向轴阻尼系数。
电动机助力转矩为:
 (4)
(4)
式中,Tm为电机输出转矩;Bm为电机轴阻尼系数;Jm为电机转动惯量;θm为电机转角。
1.2 二自由度模型
假设沿着x轴方向的行驶速度不变,由于整车坐标系与车身固连,因此整车运动就只有两个自由度,分别是围绕z轴的横摆运动,以及沿y轴的侧偏运动。
经过一系列假设后,整车就会被简化成一个以前轮转角δ为输入,只有侧向运动和横摆运动,以横摆角速度ωy、质心侧偏角β为输出的二自由度模型,如图2所示。
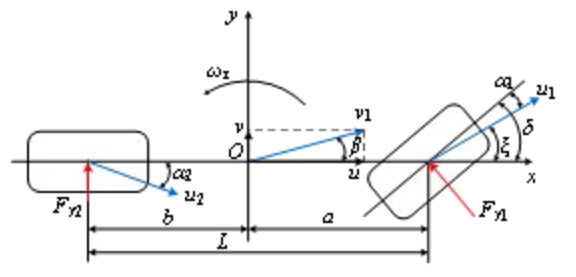
图2 二自由度汽车模型
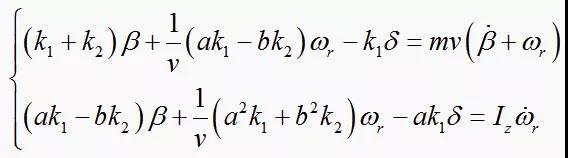
得到二自由度汽车运动微分方程式为:
 (5)
(5)
式中:m为整车质量;v为车速;a、b为质心到前后轮的距离;k1、k2分别为前后轮侧偏刚度;Iz为汽车绕z轴的转动惯量。
2 EPS控制策略研究
2.1 EPS控制策略确定
EPS系统的控制策略主要包括两个方面:
(1) 确定电机助力特性,即确定目标电流;
(2) 对助力电机电流进行闭环控制,即精确跟踪控制电机电流。
EPS控制系统结构框图如图3所示。
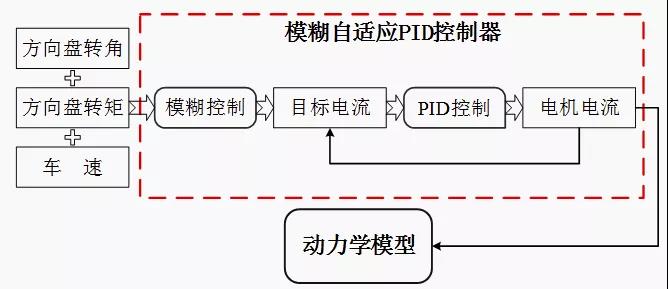
图3 EPS控制系统结构框图
基本助力控制是电动助力转向系统最为主要的控制环节。其具体实现过程为:车辆的电控单元读取釆集的方向盘转矩信号、车速信号、以及方向盘转角信号,通过车速和转矩与助力电机目标电流的关系确定目标电流,然后通过PID控制模块调整电机电流,导出当前最为适合的控制电压,将当前电流返回控制模块,形成自适应的反馈控制,修正自身误差。同时回正控制对于汽车的安全性也非常重要。为了便于简化设计,提高程序响应性,本文选用直线型助力曲线作为助力的基本控制方式。
2.2 助力电机目标电流的模糊控制
汽车行驶中会受到多种外界因素的干扰,在不同的路况和条件下,助力需要适当浮动,以适应驾驶员的主观感觉。故本文选用模糊控制方法确定目标电流。
图4所示是目标电流模糊控制框图,下面进行模糊控制规则的推导。
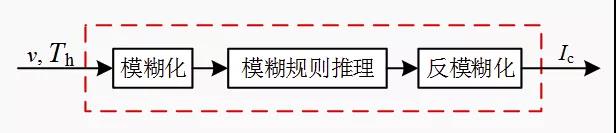
图4 目标电流模糊控制框图
(1) 输入、输出信号的模糊化
模糊化是将精确值转化为模糊量的过程,关键是求出输入变量v、Th和输出变量Ic的隶属度函数。
依据日常驾驶工况分析以及助力电机的额定电流、电压、功率等实际条件,将车速v、转矩Th和目标电流Ic的变化范围选定为论域U1、U2和U3。其中U1∈[0,120],表示车速v的值域选定为:0~120 km/h;论域U2∈[0,12],表示转矩Th的变化范围为:0~12N·m;论域U3∈[0,30],表示目标电流Ic的范围为:0~30 A。模糊子集均为:{PS3,PS2,PS1,PM,PB1,PB2,PB3},对应意义如表1所示。
表1 论域子集对应意义表

为了便于参数的调整、修改、优化,使曲线尽量平滑,减少边缘的“跳跃”现象。转矩信号、车速信号和目标电流的隶属函数选用相同形式:最左侧为Z函数,中间部分为三角型函数,最右侧为S函数。
(2) 模糊规则推理
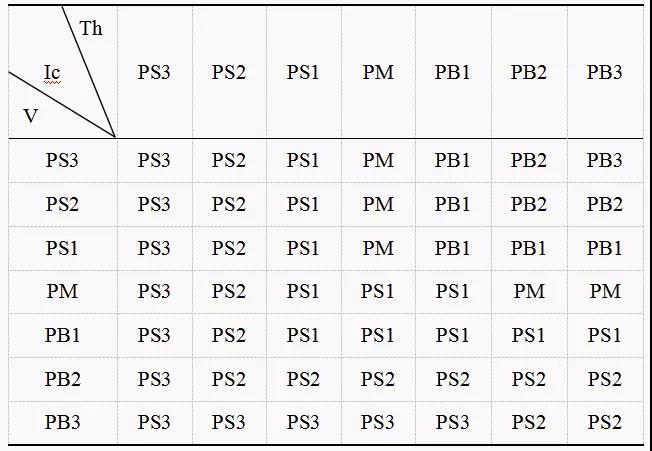
通过输入和输出模糊量的隶属函数之间的关系,建立规则库,得模糊输出量。模糊控制规则如表2所示。为满足目标电流Ic输出规则的不同强度,模糊规则推理方法采用最大最小法(Max-Min)。
表2 目标电流Ic模糊控制规则表
(3) 反模糊化
目标电流Ic的反模糊化方法采用面积重心法。根据目标电流Ic的隶属度函数,将模糊输出转换成隶属度函数对应精确值输出。图5为EPS助力曲线三维图,可以看到经反模糊化运算后车速v、方向盘转矩Th与目标电流Ic之间的对应关系。
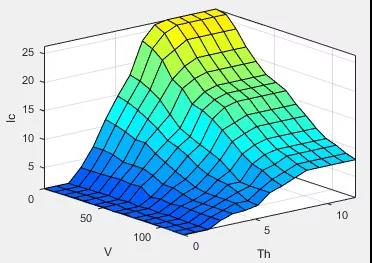
图5 基于模糊控制的EPS助力曲线三维图
3 助力特性仿真分析
3.1 助力电机目标电流仿真
根据基本助力控制和回正控制模式下目标电流的公式,在Matlab/simulink环境中搭建目标电流Ic控制模块如图6。
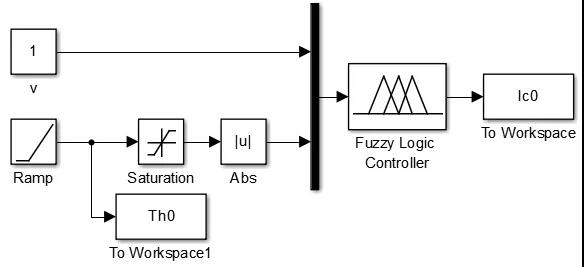
图6 目标电流Ic控制模块
选取0 km/h、30 km/h、60 km/h和90 km/h四种不同的车速工况,输入不同形式的转矩信号,对目标电流Ic进行仿真分析。
图7为当转矩信号Th由0~12 N·m线性增大时,目标电流Ic随转矩的变化曲线;图8为当转矩信号Th为周期T=5 s,幅值12 N·m的正弦输入时,目标电流Ic随时间的变化曲线。
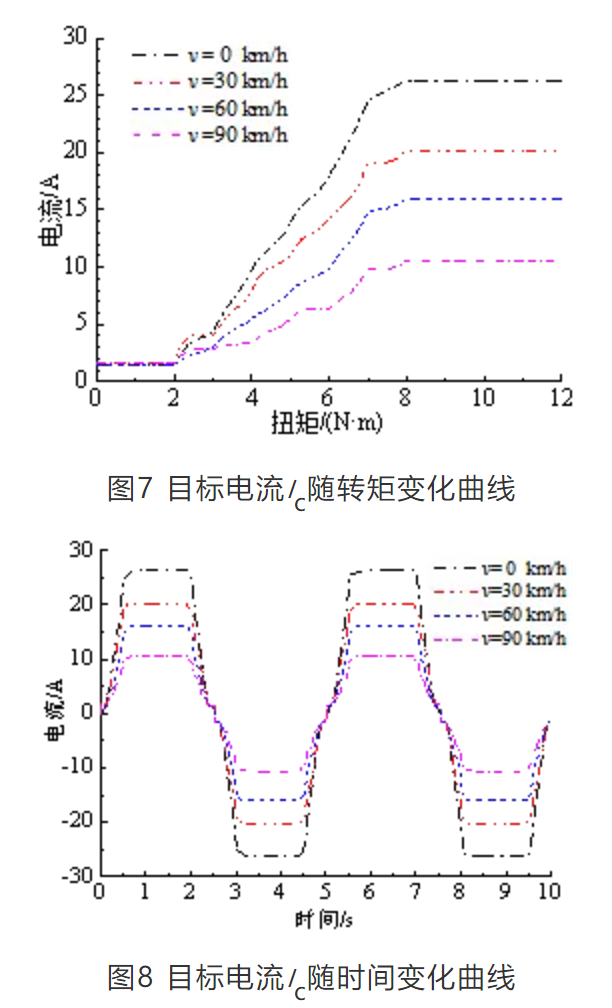
由图7、8可见,在某一车速下,当|Th|≤2 N·m时,目标电流Ic基本为零,电机的输出力矩为0;当2 N·m<|Th|≤8 N·m时,目标电流Ic基本保持线性增大,电机的输出力矩线性增大;当|Th|>8 N·m时,目标电流Ic达到最大值,电机的输出力矩维持峰值。即随着车速v增大,目标电流减小,电机助力也相应减小,符合直线型助力曲线的设计要求。
确定目标电流Ic后,为提高Ic对当前状态变化的响应和稳定性,将目标电流模块与封装后的PID控制器模块相连,即为模糊PID控制器模块。再连接EPS系统动力学模型,得到最终的EPS系统仿真模型。
3.2 基本助力特性离线仿真
选取车速在60 km/h,对基本助力特性进行仿真分析。以幅值为540°、周期为6.28 s的正弦信号作为方向盘转角输入,对比无助力时和有助力时扭矩传感器侦测到的方向盘转矩仿真结果,如图9。
可见,加入EPS后,在各车速下方向盘转矩明显下降,低速转向轻便性得到了很大提升;高速转向方向盘力矩也有所下降,但又明显高于低速转向方向盘力矩,保证了车辆在高速行驶时的路感。这种助力特性能兼顾四轮驱动汽车低速时的转向轻便性和高速转向路感,满足基本助力要求。
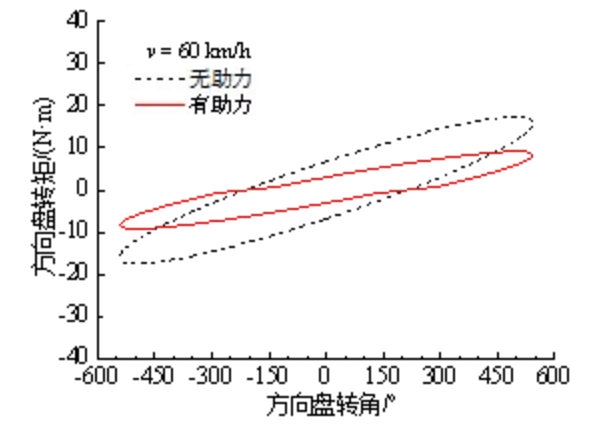
图9 EPS基本助力效果(v = 60 km/h)
4 结束语
本文完成了基于模糊PID控制的四轮驱动汽车电动助力转向控制策略的设计,并进行了验证。
(1) 对于目标电流控制,在不同转矩输入下目标电流的变化符合直线型助力曲线的设计要求;
(2) 对于基本助力控制,较好地兼顾了低速转向轻便性和高速转向路感;
本文所提的电动助力转向控制策略满足需求。
为解决四轮驱动汽车转向轻便性和路感之间的矛盾,提出了一种基于模糊PID控制的电动助力转向控制策略。首先,建立电动助力转向系统动力学模型。然后,设计基于模糊PID控制方法的电动助力转向控制策略,最后,借助Matlab/Simulink进行离线仿真,验证所提控制策略的有效性。结果表明,所提控制策略能够较好地实现四轮驱动汽车的电动助力转向系统功能。
前 言
电动助力转向系统(EPS)常常要面对各种不同的使用环境,方向盘扰动、路况变化、电磁干扰、传感器信号波动及动力单位的热辐射等都会对助力转向造成潜在的干扰。所以需要寻求更为精准的控制算法。
Hyung等通过对助力特性曲线优化分析得到了三次的助力特性曲线,通过优化转矩修正助力特性,车辆回正性能、转向刚度都得到了提升。Ciarla等对EPS助力特性曲线进行研究,建立了稳态及瞬态条件下方向盘转矩和助力电机输出转矩的数学模型。江浩斌提出为兼顾直线型助力特性与曲线型助力特性的优点,把两种特性曲线组合而成一种新型助力特性曲线,满足车辆转向过程中轻便性和路感的要求。
为了兼顾四轮驱动汽车基本助力控制,解决转向轻便性与路感的矛盾,本文建立了电动助力转向系统动力学模型,根据直线型助力曲线,研究基于模糊PID控制方法的四轮驱动汽车电动助力转向控制策略,结合模糊控制和PID控制的优点,借助Matlab/Simulink进行离线仿真,验证所提控制策略的有效性。
1 电动助力转向系统动力学模型
本文选择普遍适用于轻型车辆的转向轴助力式C-EPS为研究对象,将整个电动助力转向系统分解为包括机械转向系、转向阻力系、整车模型系和助力电机系等多个模块,分别进行建模分析。
1.1 转向系统动力学模型
车辆EPS系统为转向轴助力式,对方向盘、转向器、助力电机和转向轮等进行简化,其结构如图1所示。
图1 转向轴助力式EPS结构简图车辆行驶过程中,驾驶员通过转动方向盘,将转向意图以力的方式通过转向机构传递到车轮,实现转向,对各个力学元件受力分析,其动力学方程如下。
方向盘与扭矩传感器之间:
式中,Th为方向盘转矩;Jh为方向盘转动惯量;Bh为方向盘阻尼系数;θh为方向盘转角;Ts为传感器转矩。
对扭矩传感器有:
式中,Ks为扭矩传感器扭转刚度;θp为转向小齿轮转角。
扭矩传感器与转向小齿轮之间
式中,Ta为电机助力转矩;G为电机至转向轴的传动比;Tr为作用于转向小齿轮的阻力矩;Jp为转向轴转动惯量;Bp为转向轴阻尼系数。
电动机助力转矩为:
(4)式中,Tm为电机输出转矩;Bm为电机轴阻尼系数;Jm为电机转动惯量;θm为电机转角。
1.2 二自由度模型
假设沿着x轴方向的行驶速度不变,由于整车坐标系与车身固连,因此整车运动就只有两个自由度,分别是围绕z轴的横摆运动,以及沿y轴的侧偏运动。
经过一系列假设后,整车就会被简化成一个以前轮转角δ为输入,只有侧向运动和横摆运动,以横摆角速度ωy、质心侧偏角β为输出的二自由度模型,如图2所示。
图2 二自由度汽车模型
得到二自由度汽车运动微分方程式为:
(5)式中:m为整车质量;v为车速;a、b为质心到前后轮的距离;k1、k2分别为前后轮侧偏刚度;Iz为汽车绕z轴的转动惯量。
2 EPS控制策略研究
2.1 EPS控制策略确定
EPS系统的控制策略主要包括两个方面:
(1) 确定电机助力特性,即确定目标电流;
(2) 对助力电机电流进行闭环控制,即精确跟踪控制电机电流。
EPS控制系统结构框图如图3所示。
图3 EPS控制系统结构框图
基本助力控制是电动助力转向系统最为主要的控制环节。其具体实现过程为:车辆的电控单元读取釆集的方向盘转矩信号、车速信号、以及方向盘转角信号,通过车速和转矩与助力电机目标电流的关系确定目标电流,然后通过PID控制模块调整电机电流,导出当前最为适合的控制电压,将当前电流返回控制模块,形成自适应的反馈控制,修正自身误差。同时回正控制对于汽车的安全性也非常重要。为了便于简化设计,提高程序响应性,本文选用直线型助力曲线作为助力的基本控制方式。
2.2 助力电机目标电流的模糊控制
汽车行驶中会受到多种外界因素的干扰,在不同的路况和条件下,助力需要适当浮动,以适应驾驶员的主观感觉。故本文选用模糊控制方法确定目标电流。
图4所示是目标电流模糊控制框图,下面进行模糊控制规则的推导。
图4 目标电流模糊控制框图
(1) 输入、输出信号的模糊化
模糊化是将精确值转化为模糊量的过程,关键是求出输入变量v、Th和输出变量Ic的隶属度函数。
依据日常驾驶工况分析以及助力电机的额定电流、电压、功率等实际条件,将车速v、转矩Th和目标电流Ic的变化范围选定为论域U1、U2和U3。其中U1∈[0,120],表示车速v的值域选定为:0~120 km/h;论域U2∈[0,12],表示转矩Th的变化范围为:0~12N·m;论域U3∈[0,30],表示目标电流Ic的范围为:0~30 A。模糊子集均为:{PS3,PS2,PS1,PM,PB1,PB2,PB3},对应意义如表1所示。
表1 论域子集对应意义表
为了便于参数的调整、修改、优化,使曲线尽量平滑,减少边缘的“跳跃”现象。转矩信号、车速信号和目标电流的隶属函数选用相同形式:最左侧为Z函数,中间部分为三角型函数,最右侧为S函数。
(2) 模糊规则推理
通过输入和输出模糊量的隶属函数之间的关系,建立规则库,得模糊输出量。模糊控制规则如表2所示。为满足目标电流Ic输出规则的不同强度,模糊规则推理方法采用最大最小法(Max-Min)。
表2 目标电流Ic模糊控制规则表
(3) 反模糊化
目标电流Ic的反模糊化方法采用面积重心法。根据目标电流Ic的隶属度函数,将模糊输出转换成隶属度函数对应精确值输出。图5为EPS助力曲线三维图,可以看到经反模糊化运算后车速v、方向盘转矩Th与目标电流Ic之间的对应关系。
图5 基于模糊控制的EPS助力曲线三维图
3 助力特性仿真分析
3.1 助力电机目标电流仿真
根据基本助力控制和回正控制模式下目标电流的公式,在Matlab/simulink环境中搭建目标电流Ic控制模块如图6。
图6 目标电流Ic控制模块
选取0 km/h、30 km/h、60 km/h和90 km/h四种不同的车速工况,输入不同形式的转矩信号,对目标电流Ic进行仿真分析。
图7为当转矩信号Th由0~12 N·m线性增大时,目标电流Ic随转矩的变化曲线;图8为当转矩信号Th为周期T=5 s,幅值12 N·m的正弦输入时,目标电流Ic随时间的变化曲线。
由图7、8可见,在某一车速下,当|Th|≤2 N·m时,目标电流Ic基本为零,电机的输出力矩为0;当2 N·m<|Th|≤8 N·m时,目标电流Ic基本保持线性增大,电机的输出力矩线性增大;当|Th|>8 N·m时,目标电流Ic达到最大值,电机的输出力矩维持峰值。即随着车速v增大,目标电流减小,电机助力也相应减小,符合直线型助力曲线的设计要求。
确定目标电流Ic后,为提高Ic对当前状态变化的响应和稳定性,将目标电流模块与封装后的PID控制器模块相连,即为模糊PID控制器模块。再连接EPS系统动力学模型,得到最终的EPS系统仿真模型。
3.2 基本助力特性离线仿真
选取车速在60 km/h,对基本助力特性进行仿真分析。以幅值为540°、周期为6.28 s的正弦信号作为方向盘转角输入,对比无助力时和有助力时扭矩传感器侦测到的方向盘转矩仿真结果,如图9。
可见,加入EPS后,在各车速下方向盘转矩明显下降,低速转向轻便性得到了很大提升;高速转向方向盘力矩也有所下降,但又明显高于低速转向方向盘力矩,保证了车辆在高速行驶时的路感。这种助力特性能兼顾四轮驱动汽车低速时的转向轻便性和高速转向路感,满足基本助力要求。
图9 EPS基本助力效果(v = 60 km/h)
4 结束语
本文完成了基于模糊PID控制的四轮驱动汽车电动助力转向控制策略的设计,并进行了验证。
(1) 对于目标电流控制,在不同转矩输入下目标电流的变化符合直线型助力曲线的设计要求;
(2) 对于基本助力控制,较好地兼顾了低速转向轻便性和高速转向路感;
本文所提的电动助力转向控制策略满足需求。



 广告
广告 



最新资讯
-
展会预告 | TCT亚洲展倒计时!思看科技五大
2026-03-10 20:50
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
