




 广告
广告





















































面向智能驾驶测试的仿真场景构建技术综述(下)
2021-03-18 23:11:52· 来源:深智联SFITIC 作者:任秉韬

随着汽车智能化程度的不断提高,智能汽车通过环境传感器与周边行驶环境的信息交互与互联更为密切,需应对的行驶环境状况也越来越复杂,包括行驶道路、周边交通和
随着汽车智能化程度的不断提高,智能汽车通过环境传感器与周边行驶环境的信息交互与互联更为密切,需应对的行驶环境状况也越来越复杂,包括行驶道路、周边交通和气象条件等诸多因素,具有较强的不确定性、难以重复、不可预测和不可穷尽。限于研发周期和成本、工况复杂多样性,特别是安全因素的考虑,传统的开放道路测试试验或基于封闭试验场的测试难以满足智能驾驶系统可靠性与鲁棒性的测试要求。因此,借助数字虚拟技术的仿真测试成为智能驾驶测试验证一种新的手段,仿真场景的构建作为模拟仿真的重要组成部分,是实现智能驾驶测试中大样本、极限边界小概率样本测试验证的关键技术,这对提升智能驾驶系统的压力和加速测评水平显得尤为重要。面向智能驾驶测试的仿真场景构建技术已成为当前汽车智能化新的研究课题和世界性的研究热点,作为一种新兴技术仍面临许多挑战。
本文提出了面向智能驾驶测试的仿真场景构建方法,系统阐述了国内外研究工作的进展与现状,包括场景自动构建方法和交通仿真建模方法,重点分析一些值得深入研究的问题并围绕场景构建技术的发展趋势进行了讨论分析,最后介绍了团队相关研究在 2020 中国智能驾驶挑战赛仿真赛和世界智能驾驶挑战赛的仿真场景应用情况。
关键词: 汽车智能驾驶; 模拟仿真; 仿真测试; 场景构建; 交通建模; 智能驾驶挑战赛
智能驾驶挑战赛中仿真场景
由于汽车行驶环境尤其是交通路况极其复杂,具有高度的不确定、不可重复、不可预测和不可穷尽等特征,这使得有限的场地或道路测试工况难以完全复制和重现真实多样的行驶环境,并限于研发周期和成本,特别是安全因素的考虑,面向智能驾驶测试的仿真场景构建研究需依托于数字虚拟仿真平台来实现。本文研究团队自主开发了 PanoSim 智能驾驶模拟仿真软件,并将仿真场景构建与交通建模研究方法应用在第 3 届中 国智能汽车大赛(ChinaIntelligent Driving Challeng,CIDC) 智能驾驶仿真赛与 2020 世界智能驾驶挑战赛(World Intelligent Driv-ing Challeng,WIDC)中,首次以国产智能驾驶仿真软件作为大赛仿真平台使用。
智能驾驶挑战赛基于 PanoSim 仿真环境搭建了多种场景与交通环境,使得参赛队伍能够接入仿真场景数据库,获取仿真环境中的车载传感信息如摄像头视频流、毫米波雷达数据、激光雷达点云数据以及真值信息。智能驾驶挑战赛的仿真赛场景主要分为决策控制组和感知决策控制组两类。
3. 1 面向决策控制测试的仿真场景
决策控制组包括安全避撞和自动泊车场景两类,其中安全避撞的车辆使用雷达传感器,能直接获取环境目标数据; 自动泊车使用真值信息。在给定的仿真场景中,参赛队伍通过智能驾驶决策—控制策略,实现智能汽车在测试场景下的驾驶辅助功能。
安全避撞测试内容包括典型行人避撞和车辆避撞( 直道、弯道) 测试场景,如图 4(a)(b)所示。根据车辆的预期轨迹,构建可威胁到车辆行驶安全的边界场景,包括设计道路的形状及交通车/人运动轨迹,以此来考察系统识别危险目标和主动制动算法的能力。行人避撞测试场景分为行人在空旷场景横穿、从视觉盲区横穿两项测试内容。直道车辆避撞测试场景分为目标车切出场景、目标车切入场景。弯道车辆避撞测试场景分为目标车弯道制动场景、弯道多目标车场景。
自动泊车的测试内容分为标准车位场景,包括水平标准车位和垂直标准车位,以及非标准车位场景,包括水平非标准车位和垂直非标准车位,如图 4(c)所示。测试车辆根据场景中车位坐标信息,按照自主规划线路行进和泊车,以检验系统的规划和控制性能。
决策控制的仿真测试可与 Simulink 环境联合仿真,赛队可根据传感器数据和真值数据,建立相应的决策控制算法 mdl 模块,并将控制命令连接到主车动力学模型上。
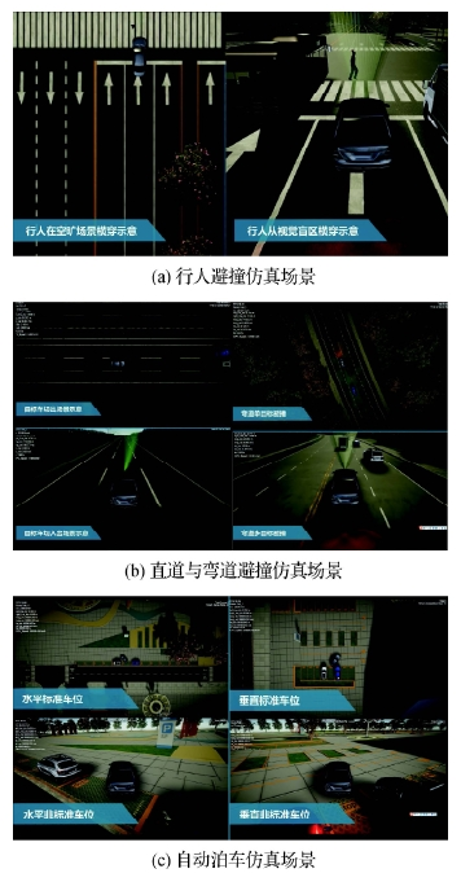
图 4 面向决策控制的仿真场景
Fig.4 Simulation scenarios for decision and control
( ( a) pedestrian avoidance; ( b) collision avoidance onstraight road and curve; ( c) automated parking)
开发过程中可使用 Simulink 内置模块,m 语言或 C 语言开发的 S Function 来实现算法。
3. 2 面向感知—决策—控制测试的仿真场景
感知决策控制组包括行人安全避撞和基于动态交通流的智能驾驶场景。行人安全避撞指定使用车载像机,需要参赛队伍使用感知算法识别目标; 智能驾驶需在给定的虚拟道路交通场景中,通过智能驾驶感知—决策—控制策略操控车辆安全高效地通过测试路段,以检验其算法的认知、决策及规划能力,评估其智能驾驶系统性能。
行人安全避撞场景分为行人在空旷场景横穿和从视觉盲区横穿两项测试,如图 5(a) 所示,该仿真场景可使用摄像头视觉传感器(输出为RGB 格式图像数据),需利用感知算法获取目标数据。基于动态交通流的智能驾驶场景是针对一定交通车密度构建的高速公路场景,如图 5(b) 所示,模拟逼真的交通行驶环境。交通车的驾驶风格可分为谨慎型、稳健型和激进型 3 种类型,设定各类型驾驶风格的比例来增加比赛难度。考察在跟驰、换道、紧急制动等场景中的车辆智能驾驶系统感知、决策和规划能力。
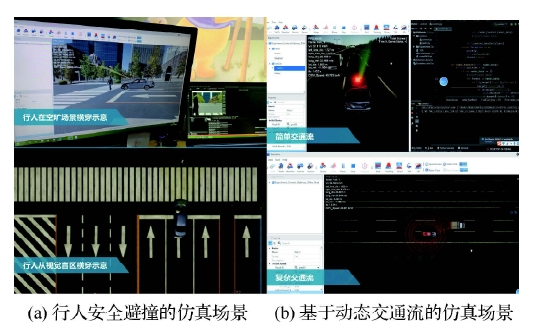
图 5 面向感知决策控制测试的仿真场景
Fig.5 Simulation scenarios for perception and decision controltesting ( ( a) pedestrian safety avoidance; ( b) dynamic traffic flow)
感知—决策—控制的测试同样与 Simulink 环境联合仿真,还提供了基于网络协议的算法接入方式,以支持不同的软硬件环境。赛队可根据脚本文件将传感器数据和主车动力学数据传输到根据参赛实际软硬件环境自行配置的网络地址,以接收主车控制命令。
最后,在建立的智能驾驶仿真平台的裁判系统实现赛题的自动成绩评定,如图 6 所示。
4 结 语
汽车行驶环境的数字模拟与仿真测试是一种智能驾驶测试验证的新方法和重要手段,是汽车智能驾驶技术研究与产品研发。仿真场景构建方法是汽车智能驾驶模拟仿真测试的重要组成部分,其理论和方法有待深入研究。通过分析该领域国内外研究现状,提出了面向智能驾驶测试的仿真场景构建方法。在场景构建方法研究方面,抽象并深刻凝练能够反映无限丰富与复杂行驶环境的有限场景的关键要素与特征,深入理解场景的网络结构与相互耦合关系,对于场景理论与方法研究至关重要; 建立场景极限与边界特征的描述方法形成场景自动生成方法能够极大发挥智能驾驶的加速测试潜能,更好地为汽车智能驾驶的开发提供测试验证服务。
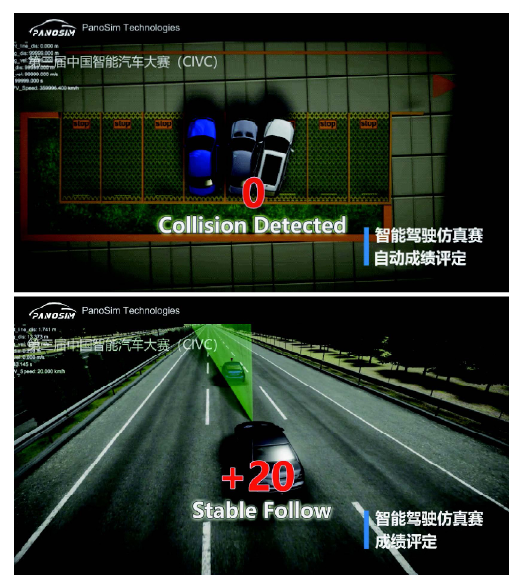
图 6 智能驾驶仿真赛的成绩评定
Fig.6 Performance evaluation of intelligentdriving simulation competition
在交通建模方法方面,深刻理解交通车辆驾驶行为和彼此交互特征,是面向智能驾驶仿真测试的交通建模基础和首要任务; 如何挖掘数据信息中车辆驾驶运动的影响规律,建立随机—危险特征的交通模型,是实现面向智能驾驶仿真测试核心和关键。最后介绍了团队相关研究在 2020 中国智能驾驶挑战赛仿真赛和世界智能驾驶挑战赛的仿真场景应用情况。随着计算机软硬件、实时图形图像处理、虚拟现实,特别是并行处理和图像渲染等模拟仿真技术的不断发展,以及对汽车行驶环境模拟和环境传感器建模技术的不断提高,基于模拟仿真的汽车智能驾驶仿真测试技术必将成为汽车智能驾驶技术与产品研发核心竞争力的决定性因素。
本文提出了面向智能驾驶测试的仿真场景构建方法,系统阐述了国内外研究工作的进展与现状,包括场景自动构建方法和交通仿真建模方法,重点分析一些值得深入研究的问题并围绕场景构建技术的发展趋势进行了讨论分析,最后介绍了团队相关研究在 2020 中国智能驾驶挑战赛仿真赛和世界智能驾驶挑战赛的仿真场景应用情况。
关键词: 汽车智能驾驶; 模拟仿真; 仿真测试; 场景构建; 交通建模; 智能驾驶挑战赛
智能驾驶挑战赛中仿真场景
由于汽车行驶环境尤其是交通路况极其复杂,具有高度的不确定、不可重复、不可预测和不可穷尽等特征,这使得有限的场地或道路测试工况难以完全复制和重现真实多样的行驶环境,并限于研发周期和成本,特别是安全因素的考虑,面向智能驾驶测试的仿真场景构建研究需依托于数字虚拟仿真平台来实现。本文研究团队自主开发了 PanoSim 智能驾驶模拟仿真软件,并将仿真场景构建与交通建模研究方法应用在第 3 届中 国智能汽车大赛(ChinaIntelligent Driving Challeng,CIDC) 智能驾驶仿真赛与 2020 世界智能驾驶挑战赛(World Intelligent Driv-ing Challeng,WIDC)中,首次以国产智能驾驶仿真软件作为大赛仿真平台使用。
智能驾驶挑战赛基于 PanoSim 仿真环境搭建了多种场景与交通环境,使得参赛队伍能够接入仿真场景数据库,获取仿真环境中的车载传感信息如摄像头视频流、毫米波雷达数据、激光雷达点云数据以及真值信息。智能驾驶挑战赛的仿真赛场景主要分为决策控制组和感知决策控制组两类。
3. 1 面向决策控制测试的仿真场景
决策控制组包括安全避撞和自动泊车场景两类,其中安全避撞的车辆使用雷达传感器,能直接获取环境目标数据; 自动泊车使用真值信息。在给定的仿真场景中,参赛队伍通过智能驾驶决策—控制策略,实现智能汽车在测试场景下的驾驶辅助功能。
安全避撞测试内容包括典型行人避撞和车辆避撞( 直道、弯道) 测试场景,如图 4(a)(b)所示。根据车辆的预期轨迹,构建可威胁到车辆行驶安全的边界场景,包括设计道路的形状及交通车/人运动轨迹,以此来考察系统识别危险目标和主动制动算法的能力。行人避撞测试场景分为行人在空旷场景横穿、从视觉盲区横穿两项测试内容。直道车辆避撞测试场景分为目标车切出场景、目标车切入场景。弯道车辆避撞测试场景分为目标车弯道制动场景、弯道多目标车场景。
自动泊车的测试内容分为标准车位场景,包括水平标准车位和垂直标准车位,以及非标准车位场景,包括水平非标准车位和垂直非标准车位,如图 4(c)所示。测试车辆根据场景中车位坐标信息,按照自主规划线路行进和泊车,以检验系统的规划和控制性能。
决策控制的仿真测试可与 Simulink 环境联合仿真,赛队可根据传感器数据和真值数据,建立相应的决策控制算法 mdl 模块,并将控制命令连接到主车动力学模型上。
图 4 面向决策控制的仿真场景
Fig.4 Simulation scenarios for decision and control
( ( a) pedestrian avoidance; ( b) collision avoidance onstraight road and curve; ( c) automated parking)
开发过程中可使用 Simulink 内置模块,m 语言或 C 语言开发的 S Function 来实现算法。
3. 2 面向感知—决策—控制测试的仿真场景
感知决策控制组包括行人安全避撞和基于动态交通流的智能驾驶场景。行人安全避撞指定使用车载像机,需要参赛队伍使用感知算法识别目标; 智能驾驶需在给定的虚拟道路交通场景中,通过智能驾驶感知—决策—控制策略操控车辆安全高效地通过测试路段,以检验其算法的认知、决策及规划能力,评估其智能驾驶系统性能。
行人安全避撞场景分为行人在空旷场景横穿和从视觉盲区横穿两项测试,如图 5(a) 所示,该仿真场景可使用摄像头视觉传感器(输出为RGB 格式图像数据),需利用感知算法获取目标数据。基于动态交通流的智能驾驶场景是针对一定交通车密度构建的高速公路场景,如图 5(b) 所示,模拟逼真的交通行驶环境。交通车的驾驶风格可分为谨慎型、稳健型和激进型 3 种类型,设定各类型驾驶风格的比例来增加比赛难度。考察在跟驰、换道、紧急制动等场景中的车辆智能驾驶系统感知、决策和规划能力。
图 5 面向感知决策控制测试的仿真场景
Fig.5 Simulation scenarios for perception and decision controltesting ( ( a) pedestrian safety avoidance; ( b) dynamic traffic flow)
感知—决策—控制的测试同样与 Simulink 环境联合仿真,还提供了基于网络协议的算法接入方式,以支持不同的软硬件环境。赛队可根据脚本文件将传感器数据和主车动力学数据传输到根据参赛实际软硬件环境自行配置的网络地址,以接收主车控制命令。
最后,在建立的智能驾驶仿真平台的裁判系统实现赛题的自动成绩评定,如图 6 所示。
4 结 语
汽车行驶环境的数字模拟与仿真测试是一种智能驾驶测试验证的新方法和重要手段,是汽车智能驾驶技术研究与产品研发。仿真场景构建方法是汽车智能驾驶模拟仿真测试的重要组成部分,其理论和方法有待深入研究。通过分析该领域国内外研究现状,提出了面向智能驾驶测试的仿真场景构建方法。在场景构建方法研究方面,抽象并深刻凝练能够反映无限丰富与复杂行驶环境的有限场景的关键要素与特征,深入理解场景的网络结构与相互耦合关系,对于场景理论与方法研究至关重要; 建立场景极限与边界特征的描述方法形成场景自动生成方法能够极大发挥智能驾驶的加速测试潜能,更好地为汽车智能驾驶的开发提供测试验证服务。
图 6 智能驾驶仿真赛的成绩评定
Fig.6 Performance evaluation of intelligentdriving simulation competition
在交通建模方法方面,深刻理解交通车辆驾驶行为和彼此交互特征,是面向智能驾驶仿真测试的交通建模基础和首要任务; 如何挖掘数据信息中车辆驾驶运动的影响规律,建立随机—危险特征的交通模型,是实现面向智能驾驶仿真测试核心和关键。最后介绍了团队相关研究在 2020 中国智能驾驶挑战赛仿真赛和世界智能驾驶挑战赛的仿真场景应用情况。随着计算机软硬件、实时图形图像处理、虚拟现实,特别是并行处理和图像渲染等模拟仿真技术的不断发展,以及对汽车行驶环境模拟和环境传感器建模技术的不断提高,基于模拟仿真的汽车智能驾驶仿真测试技术必将成为汽车智能驾驶技术与产品研发核心竞争力的决定性因素。



 广告
广告 


最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
