




 广告
广告





















































可变转向比技术详解(二)
2021-02-04 11:23:27· 来源:IND4汽车人

机械式可变转向比系统如下图:机械可变转向比可以通过改变齿条的齿间距来实现。按照用途可以分成3种第一种:齿距中间疏,两边密第二种:齿距中间密,两边疏第三
机械式可变转向比系统
如下图:机械可变转向比可以通过改变齿条的齿间距来实现。
按照用途可以分成3种
第一种:齿距中间疏,两边密
第二种:齿距中间密,两边疏
第三种:齿距中间密,两边由疏到密
第一种:齿距中间疏,两边密如下图的齿条结构

其转向器线角传动比的曲线如下:
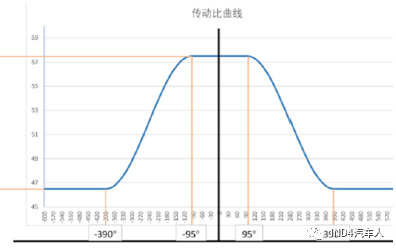
从曲线中我们可以看出,这款转向系统的特点是:
中间位置(±100°左右) 齿距较宽,齿条在这一范围内的位移较大,线角传动比大,灵敏度高,手力增大,适合注重运动体验的车型。齿条两端齿距较窄,转向器线角传动比小,灵敏度小,手力减少。
当然,也有它的缺点,就是在掉头或是倒车时方向盘圈数大,对于应急的状态表现不好。
第二种:齿距中间密,两边疏如下图的齿条结构

其转向器线角传动比的曲线如下:
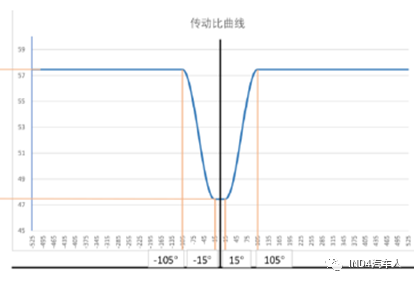
从曲线中我们可以看出,这款转向系统的特点与上面的正好相反。
这款的好处在于在掉头或是倒车时方向盘圈数大,对于应急的状态表现好,适合于注重驾驶平稳的车型。
第三种:齿距中间密,两边由疏到密如下图的齿条结构

其转向器线角传动比的曲线如下:
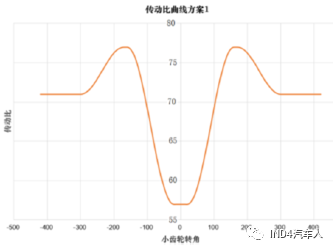
从曲线中我们可以看出,这款转向系统的特点是:
主要点在于两端传动,两端传动比由大到小,兼顾了第二种的特点转向沉稳,又兼顾了转向第一种手力轻省电。
以上是机械的可变传动比的结构介绍,它的缺点在于齿比变化范围有限,并且不能灵活变化,优点是完全的机械结构,可靠性较高,耐用性好,结构也非常简单。
电子式可变转向比系统
电子式可变转向比系统宝马称之为AFS主动转向系统(Active Front Steering);
奥迪将其称之为动态转向系统(Audi Dynamic Steering);
雷克萨斯/丰田使用的则是可变齿比转向系统VGRS(Variable Gear Ratio Steering);
而奔驰的可变转向比系统是以“直接转向系统”命名;
虽然功能类似,但是他们使用的技术却是截然不同的。
从技术层面上看,实现电子式可变转向比有两种方式,一种是行星齿轮结构和电子系统来实现,一种是谐波齿轮+电控系统来实现。
其中奥迪A6L使用的就是谐波齿轮+电控系统,其具备可变转向比的能力,基于谐波齿轮的特殊结构实现了转向比在一定范围内的连续变化,能够在一定范围内放大或缩小驾驶者的转向动作。
改变转向比的原理是谐波传统系统的错齿运动。连着方向盘的输入轴与柔轮(薄型环齿圈)相连,其内有柔性滚珠轴承,中心为电机驱动的椭圆转子,与输出轴相连的是外环面构成的刚轮,在转子被锁止时(电机未通电或发生故障),转向系统转向比保持恒定。而电机驱动中央转子旋转时,会带动柔轮旋转,当转子与柔轮同向旋转时,由于柔轮的齿数比外环刚轮的齿数小,所以刚轮的转动角度便会大于柔轮,使转向角度被放大,而当转子反转时,就能够起到缩小转向角度的作用。
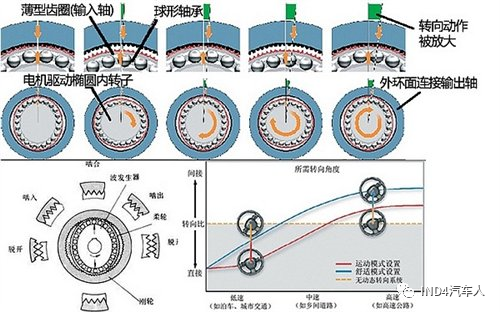
相比行星齿轮系统,谐波齿轮传动结构优点:结构相对简单,结构承载能力高,传动比大,运转平顺,噪音较低,另外,这种结构传动效率高,且响应速度快,运转精度高。
如下图:机械可变转向比可以通过改变齿条的齿间距来实现。
按照用途可以分成3种
第一种:齿距中间疏,两边密
第二种:齿距中间密,两边疏
第三种:齿距中间密,两边由疏到密
第一种:齿距中间疏,两边密如下图的齿条结构
其转向器线角传动比的曲线如下:
从曲线中我们可以看出,这款转向系统的特点是:
中间位置(±100°左右) 齿距较宽,齿条在这一范围内的位移较大,线角传动比大,灵敏度高,手力增大,适合注重运动体验的车型。齿条两端齿距较窄,转向器线角传动比小,灵敏度小,手力减少。
当然,也有它的缺点,就是在掉头或是倒车时方向盘圈数大,对于应急的状态表现不好。
第二种:齿距中间密,两边疏如下图的齿条结构
其转向器线角传动比的曲线如下:
从曲线中我们可以看出,这款转向系统的特点与上面的正好相反。
这款的好处在于在掉头或是倒车时方向盘圈数大,对于应急的状态表现好,适合于注重驾驶平稳的车型。
第三种:齿距中间密,两边由疏到密如下图的齿条结构
其转向器线角传动比的曲线如下:
从曲线中我们可以看出,这款转向系统的特点是:
主要点在于两端传动,两端传动比由大到小,兼顾了第二种的特点转向沉稳,又兼顾了转向第一种手力轻省电。
以上是机械的可变传动比的结构介绍,它的缺点在于齿比变化范围有限,并且不能灵活变化,优点是完全的机械结构,可靠性较高,耐用性好,结构也非常简单。
电子式可变转向比系统
电子式可变转向比系统宝马称之为AFS主动转向系统(Active Front Steering);
奥迪将其称之为动态转向系统(Audi Dynamic Steering);
雷克萨斯/丰田使用的则是可变齿比转向系统VGRS(Variable Gear Ratio Steering);
而奔驰的可变转向比系统是以“直接转向系统”命名;
虽然功能类似,但是他们使用的技术却是截然不同的。
从技术层面上看,实现电子式可变转向比有两种方式,一种是行星齿轮结构和电子系统来实现,一种是谐波齿轮+电控系统来实现。
其中奥迪A6L使用的就是谐波齿轮+电控系统,其具备可变转向比的能力,基于谐波齿轮的特殊结构实现了转向比在一定范围内的连续变化,能够在一定范围内放大或缩小驾驶者的转向动作。
改变转向比的原理是谐波传统系统的错齿运动。连着方向盘的输入轴与柔轮(薄型环齿圈)相连,其内有柔性滚珠轴承,中心为电机驱动的椭圆转子,与输出轴相连的是外环面构成的刚轮,在转子被锁止时(电机未通电或发生故障),转向系统转向比保持恒定。而电机驱动中央转子旋转时,会带动柔轮旋转,当转子与柔轮同向旋转时,由于柔轮的齿数比外环刚轮的齿数小,所以刚轮的转动角度便会大于柔轮,使转向角度被放大,而当转子反转时,就能够起到缩小转向角度的作用。
相比行星齿轮系统,谐波齿轮传动结构优点:结构相对简单,结构承载能力高,传动比大,运转平顺,噪音较低,另外,这种结构传动效率高,且响应速度快,运转精度高。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
