




 广告
广告





















































拆解奥迪A8,从中学到教训
2020-05-04 23:29:39· 来源:智车科技 作者:吉田顺子

奥迪制造了世界上第一辆L3级自动驾驶汽车A8,尽管A8因为各种原因不再配置该系统,但其中的经验教育值得深度拆解。本文来源:EET Asia作者:吉田顺子,智车科技编
奥迪制造了世界上第一辆L3级自动驾驶汽车A8,尽管A8因为各种原因不再配置该系统,但其中的经验教育值得深度拆解。
本文来源:EET Asia 作者:吉田顺子,智车科技编译
奥迪A8的最新拆解恰恰说明了从技术和经济角度来看,实现更高水平的汽车自主性比任何人最初的预期都难。因此,奥迪在A8上的经验至今仍然很重要。
当奥迪于2017年底推出重新设计的A8轿车时,该公司吹捧它是汽车行业的首款L3级汽车。整个汽车行业仍在面对当时奥迪面临的技术问题和陌生的成本结构。
System Plus进行的拆卸提供了对以下几个问题的宝贵见解:
- 制造出L3级汽车需要什么?
- A8传感器套件包含什么?
- 三级车需要多少处理能力?
- 是GPU,SoC,CPU还是FPGA驱动着奥迪的称为zFAS的中央驾驶员辅助控制器吗?
- zFAS的价格是多少?这对奥迪如何使用市场上已有的芯片实现了Level 3功能具有启发性,并且已经在其他应用中进行了测试和测试,特别是与特斯拉相比,特斯拉在两年后(2019年)推出了“ 全自动驾驶计算机 ”主板主要依靠两个自产的自动驾驶芯片。
System Plus拆解包括的分析不仅仅包括逆向工程和确定硬件元素。该公司还执行“反向成本计算”,即估算公司采购特定组件和制造其产品所必须付出的成本。System Plus的A8反向成本计算表明,zFAS成本的60%(估计为290美元)是由半导体成本驱动的。这几乎令人吃惊,因为现代汽车中80%至85%的内容是电子产品。但是,这并不是令人惊讶的成本。
System Plus的拆解/成本估算不包括自动驾驶汽车软件开发的成本。但是,在zFAS中使用FPGA(Altera Cyclone)表明,奥迪试图保留自己已经开发的软件资产。
在过去的18个月中,一些领先的OEM厂商开始暗示他们希望设计自己的自动驾驶汽车芯片(特斯拉)。这种方法使他们能够在硬件和软件开发方面控制自己的命运。然而,鉴于芯片设计的高昂成本,目前尚不清楚汽车原始设备制造商是否会更好地独自解决。
在A8投放市场时,车内技术被称为“自动驾驶突破”,其特色是名为Traffic Jam Pilot的系统。启用该功能后,Traffic Jam Pilot可以缓解驾驶员在停停走走交通谈判中的麻烦。
但是,这些规划最完善的计划与“交接问题”(当计算机停滞时提醒并吸引分心的人)相冲突,自一开始就困扰着Level-3车辆的概念。
如今,A8出现在大街上,但没有一个在现实世界中激活并运行其3级自治功能。
A8向视听行业表明了它所面临的挑战。行业领导者必须弄清各种监管,技术,安全,行为,法律和与业务相关的复杂性,然后才能吹嘘无人驾驶机器人的未来。这部分解释了汽车原始设备制造商,一级供应商,芯片供应商以及技术和服务公司(即Waymo,Uber)之间制定安全标准的势头越来越大。
引擎盖下的A8
汽车制造商所面临的挑战将不再是提供从零到100 km / h的最快速度或最佳加速,而是要确保日益先进的自动驾驶和辅助系统。这是奥迪A8具有第3级自驾功能的目标,这是第一个使用激光雷达技术的汽车。
A8的传感器套件还包括摄像头,雷达和超声波传感器。奥迪A8将自动在最拥挤的道路上进行驾驶管理,而无需驾驶员干预。奥迪(Audi)规定,驾驶员可以始终保持双手不离开方向盘,并且可以根据当地法律法规进行其他活动,例如在车上看电视。车辆可以执行大多数驾驶任务,但仍然需要人工控制(图1)。
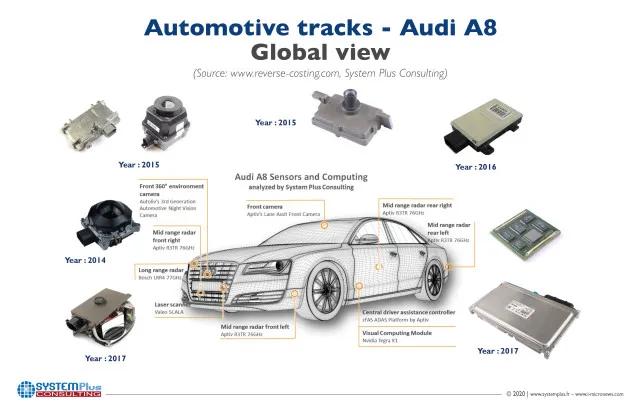
图1:奥迪A8的关键要素
弗劳克斯(Fraux)在奥迪A8内的创新技术名列榜首:“奥迪是首款具有3级自主性的汽车。安装在奥迪A8上的Traffic Jam Pilot系统使用传感器融合技术和世界上第一台激光扫描仪,负责在高速公路和高速公路上以60 km / h的速度缓慢行驶的交通。(注意:但是,此级别3功能迄今为止尚未激活)
L3级自治和计算平台
数字技术可以承担驾驶员应执行的相同任务,同时提供更高的安全性和舒适性。长期目标是拥有完全联网的道路-汽车智能电网。减少交通拥堵和环境污染,安全性显着提高。
无人驾驶是汽车界越来越重要的话题。有关该部门的进展和新颖性的新闻 已提上日程。奥迪A8所使用的级别3被定义为高度自动驾驶。该系统能够使驾驶员无需对车辆的纵向和横向运动进行连续控制。
弗劳克斯说:“奥迪A8由Aptiv与四个处理器芯片组合在一起的各种传感器和一个zFAS控制器组成。” zFAS(图2)是第一个集中式计算平台。一台计算机作为中央枢纽,用于处理超声传感器(前,后和侧面),360度摄像头(前,后和侧面镜),中程雷达(各个角度)以及远程雷达和激光扫描仪实时位于车辆前部。

图2:Aptiv zFAS控制器
zFAS中的大量处理器构成该平台的处理器是Nvidia Tegra K1,用于交通信号识别,行人检测,碰撞警告,光检测和车道识别。具有八层PCB的Tegra K1集成了192个Cuda内核,与Nvidia集成到目前市场上的开普勒GPU(图3)中支持DirectX 11和OpenGL 4.4的单个SMX模块中的数量相同。
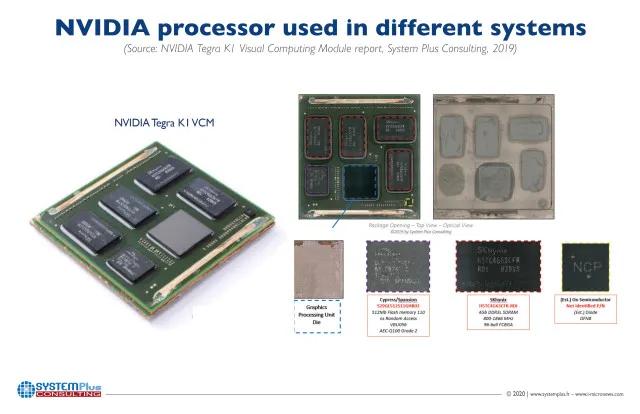
图3:Nvidia Tegra K1
考虑到集成在其中的传感器的数量,在汽车中拥有非常强大的处理器至关重要。英特尔/ Mobileye的EyeQ3负责图像处理。为了满足功耗和性能目标,EyeQ SoC通过使用更精细的几何体进行设计。在Eye3中,Mobileye使用40 nm CMOS,而该公司将在第五代SoC EyeQ5中使用7nm FinFET。每个EyeQ芯片均具有异构的完全可编程的加速器。每个加速器类型都针对其自己的算法系列进行了优化。
奇怪的是,Nvidia Tegra K1和Mobileye EyeQ 3不足以处理3级车辆的所有ADAS任务。在zFAS内部是用于数据预处理的Altera Cyclone和用于监视安全操作的Infineon Aurix Tricore。Altera Cyclone系列FPGA器件基于1.5V,0.13µm的全层铜SRAM工艺,具有高达20,060个逻辑单元(LE)的密度和高达288 kbit的RAM。
英飞凌Aurix架构实现了汽车行业动力总成和安全应用中的性能优化。TriCore是第一个为实时嵌入式系统优化的统一的单核32位微控制器-DSP架构。
奥迪A8中的传感器
汽车世界中,高级驾驶辅助系统已成为所有新车获得更高欧洲NCAP评分的必要条件。在图1的第一页中,我们可以找到System Plus发现的Audi A8中设备的详细列表。“制造商正在开发效率越来越高的雷达传感器,在市场上,我们可以区分一些公司,例如Aptiv,Veoneer,ZF,Valeo,Bosch,Mando,Denso和Ainstein,” Fraux说。
特别是在奥迪A8中,我们可以看到Autoliv的第三 代汽车夜视摄像头,Aptiv的车道辅助前置摄像头,法雷奥Scala激光扫描仪,博世LRR4 77GHz长距离雷达传感器,Aptiv R3TR 76 GHz是中距离雷达的右前方左,左,右后Autoliv夜视摄像机由两个模块组成:摄像机和一个远程处理单元(图4)。Autoliv的红外夜视摄像机由FLIR的17μm像素高清氧化钒微测辐射仪ISC0901组成。该器件基于复杂的光学系统和基于FPGA阵列和定制算法的复杂数值处理系统,提供了一种工程方法。

图4:Autoliv的第三代汽车夜视摄像机
Aptiv的车道辅助前置摄像头安装在后视镜上,可提供80米的范围和36张图像/秒的帧。该相机使用安森美半导体提供的1.2兆像素CMOS图像传感器和8位Microchip PIC微控制器。zFAS控制单元使用Mobileye EyeQ3处理芯片来管理图像映射和识别软件(图5)。

图5:Aptiv车道辅助前置摄像头的PCB
LRR4是一种多模式雷达,带有六个来自博世的固定雷达天线。四个居中排列的天线提供了对环境的高速记录,创建了聚焦光束,其孔径角为±6度,并且在相邻车道中的交通干扰最小。在近场中,LRR4的两个外部天线将视场扩大到±20度,范围为5米,能够快速检测进入或离开车道的车辆(图6)。

图6:远程雷达传感器(图片:System Plus)
Aptiv的短程雷达传感器由两个发射器通道和四个接收器通道组成,并在76-77 GHz频带内运行,这是汽车雷达应用的标准配置。PCB使用单片微波集成电路(MMIC)和腔波导。射频(RF)印刷电路板(PCB)基板使用玻璃增强的烃基陶瓷层压板,并且完全不含PTFE(图7和8)。

图7:Aptiv R3TR 76GHz短程雷达概述

图8:Aptiv R3TR 76GHz短程雷达电子板
激光雷达技术
奥迪A8的关键要素是激光雷达。这是汽车制造商第一次使用激光扫描仪。它是基于具有旋转镜技术和边缘发射技术中905 nm波长的机械系统的激光雷达。该设备的射程为150米,水平视场角为145°,垂直视场角为3.2°。电机控制单元由带有控制驱动器的定子和转子以及用于运动检测的MPS40S霍尔传感器组成。霍尔效应传感器响应于磁场而改变其输出电压。这是一个持久的解决方案,因为没有机械零件会随着时间的流逝而磨损。集成的软件包减少了系统的大小和实现的相对复杂性(图9、10、11)。
激光雷达系统基于飞行时间(ToF),可测量精确的计时事件(图12)。最新的发展已经看到了几种多光束激光雷达系统,它们可以生成车辆周围环境的精确三维图像。该信息用于选择最合适的驾驶操作。

图9:激光扫描仪(图片:System Plus)

图10:在Audi A8中实现的激光扫描仪的内部
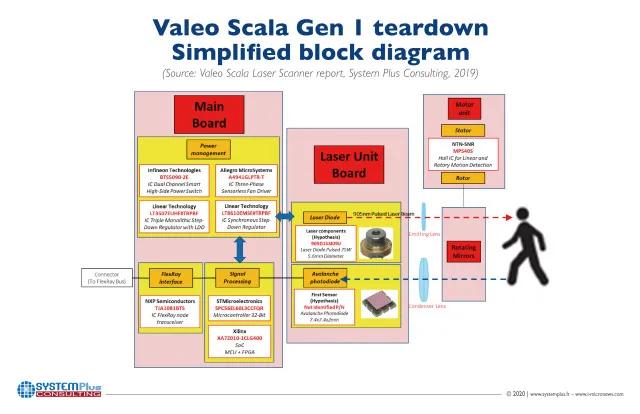
图11:激光扫描仪的框图

图12:飞行时间功能图(图片:Maxim Integrated)
边缘发射激光器是半导体激光器的原始且仍被广泛使用的形式。它们的谐振长度可以实现高增益。在该结构内,激光束在典型的双异质结构波导结构中导向。根据波导的物理特性,有可能获得高光束质量但输出功率有限的输出,或获得高输出功率但光束质量低的输出(图13)。

图13:边发射激光二极管
激光雷达解决方案中使用的激光器具有3引脚TO型封装,管芯面积为0.27 mm 2 ,如图13所示。激光器的功率为75 W,直径为5.6 mm。“可能是Sheaumann为100 mm晶圆上的激光组件制造的,” Fraux说。调节单元使用雪崩光电二极管(APD)来获取穿过两片透镜(一个发射和一个接收)后的激光束。Fraux说:“ APD可能是由第一传感器在150毫米晶圆上制成的,该晶圆具有8引脚FR4 LLC封装,管芯面积为5.2 mm 2(图14)。”
APD是一种高速光电二极管,它使用光子倍增来获得低噪声信号。APD比PIN光电二极管具有更高的信噪比,可用于各种应用,例如高精度测距仪和低照度检测。从电子角度来看,APD需要更高的反向电压,并需要更详细地考虑其与温度有关的增益特性。
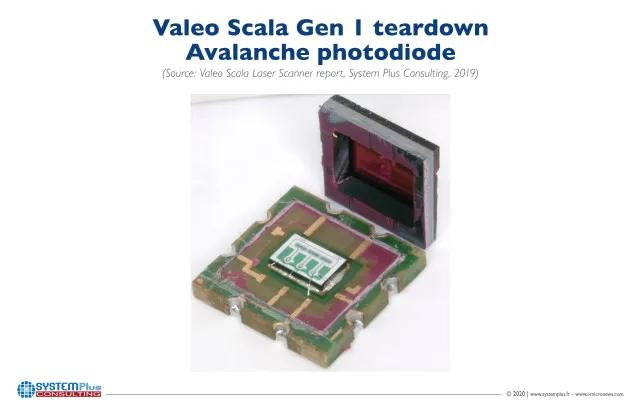
图14:雪崩光电二极管(APD)
除了用于激光和运动控制的两个单元之外,控制硬件还包括主板,该主板包括Xilinx XA7Z010 SoC双核ARM Cortex-A9、32位STMicroelectronics SPC56EL60L3微控制器以及包括以下各项的电源管理系统:ADI公司的同步降压稳压器,英飞凌公司的双通道智能高端电源开关,ADI公司的带LDO的三路单片式降压IC和Allegro公司的三相无传感器风扇驱动器IC。FlexRay协议支持数据通信。FlexRay系统由几个电子控制单元组成,每个电子控制单元都带有一个控制器,该控制器管理对一个或两个通信通道的访问。
估计这种激光雷达技术每年每超过10万单位的成本可能达到150美元,其中很大一部分与主机板和激光器有关(图15)。
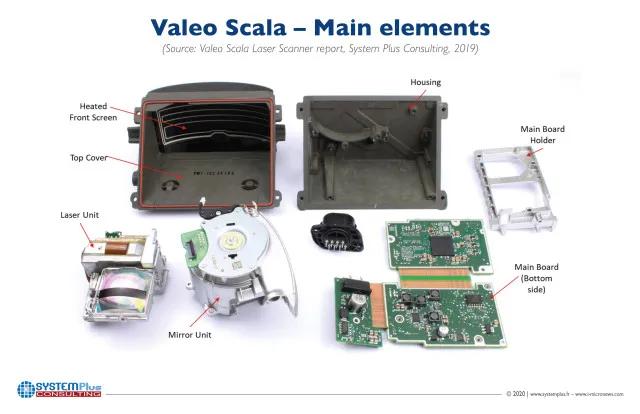
图15:拆卸的激光扫描仪硬件
在激光雷达项目中,跨阻放大器是电子布局中最关键的部分。低噪声,高增益和快速恢复特性使这些新器件成为汽车应用的理想选择。为了获得最佳性能,设计人员必须特别注意接口和集成电路,波长和光机械对准的问题。这些集成电路符合AEC-Q100认证,可满足汽车行业最严格的安全要求。
- 下一篇:福特发布自动驾驶汽车数据以鼓励进一步研究
- 上一篇:异响仿真之神秘武器



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
