-

简介:Halo 机器人是一种直接驱动的中空转向机器人, 能够以高精度和高重复性施加各种转向输入, 因此可以获得高质量的数据。Halo采用的是一款低摩擦系数的直接驱动电机和轻便的外壳 材料,使它成为了市场上转动惯量和...
-

简介:对于测量近耳音频及通讯设备(如手机、手持话柄、ANC耳机/耳麦、智能音箱等)的语音与音频质量,HMS II.3 人工头是理想的测量设备。除此之外,该人工头也可用于测量远耳通讯设备,如免提系统或智能音箱等。头肩模...
-

简介:HMS V 数字人工头结合了尖端技术、高灵活性和易用性。凭借其双 ADC 技术(两个并行的模数转换器),HMS V 覆盖整个可听动态范围,无需设置量程。借助 HMS V,您可以在测试过程中直接使用双耳均衡。耳机接口支持在...
-
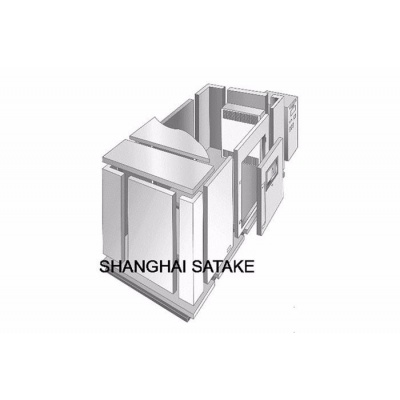
简介:本试验室根据用户的要求特别设计和制造,用于模拟室内外的各种环境条件,如温度、湿度、日照、刮风、降雨和降雪等,应用领域非常广泛。
-

简介:我们在奥地利林茨研发中心的专业团队,拥有超过20年开发主动安全测试设备的经验。 目前,主动安全的关键要素是高级辅助驾驶系统(ADAS)。这些新型技术,如盲点检测、自动换道和自动刹车等,旨在帮助司机避免事故发...
-

简介:奇石乐凭借DTI技术精心设计的假人内置数采集成方案,使得碰撞测试用假人各个部位总成可以便捷地进行连接与断连(如校准传感器所需的连接)。例如,头/颈总成的组装与拆除,仅需拔插位于抗干扰总线结构中的一根线...
-
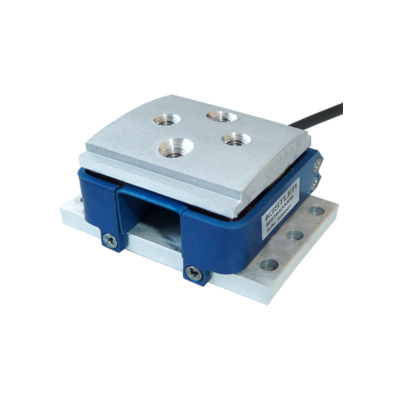
简介:型号 M536533轴力传感器专为测量肩部的作用力Fx、Fy、Fz设计。 测量范围4 kN、5 kN、4 kN 线性偏差和滞后均很小极性符合SAE J211/1
-

简介:型号 M568266分量力传感器专为测量腰椎作用力 Fx, Fy, Fz和扭矩Mx, My, Mz设计。测量范围10 kN、10 kN、12 kN和300 Nm、300 Nm、200 Nm线性偏差和滞后均很小极性符合SAE J211/1
-
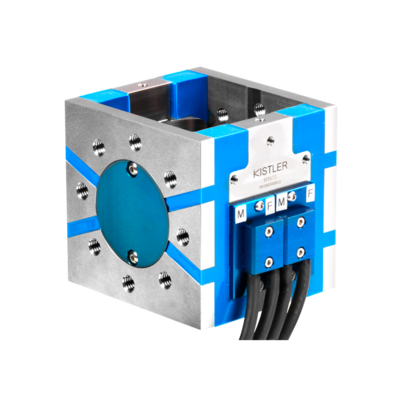
简介:型号 M5670B12分量力传感器用于测量髂骨左右两侧的作用力Fx, Fy, Fz和扭矩 Mx, My, Mz。 测量范围6 kN、12kN、6 kN和800 Nm、400 Nm、400 Nm 线性偏差和滞后均很小极性符合SAE J211/1
-
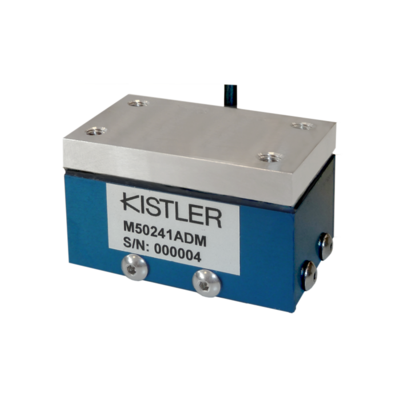
简介:型号 M50241单轴力传感器用于测量假人的耻骨作用力Fy。测量范围 12 kN 线性偏差和滞后均很小 极性符合SAE J211/1
-

简介:型号 M539033轴力传感器用于测量大腿的作用力 Fx, Fy, Fz 。 测量范围 10 kN、25 kN、10 kN线性偏差和滞后均很小 极性符合SAE J211/1
-

简介:型号 M539233轴力传感器用于测量大腿的作用力Fx, Fy, Fz。测量范围10 kN、25 kN、10 kN线性偏差和滞后均很小极性符合SAE J211/1
-

简介:加速度计基于先进的压阻MEMS传感器元件,具有优异的动态性能和稳定性。
-

简介:6分量颈部力传感器用于测量假人上颈和下颈部的作用力 Fx, Fy, Fz和扭矩Mx, My, Mz。测量范围 10 kN, 10 kN, 12 kN和300 Nm, 300 Nm, 200 Nm 线性偏差和滞后均很小 极性符合SAE J211/1
-

简介:碰撞试验假人是用来测量乘员在发生事故和爆炸时作用在人体上的加速度、力和力矩。奇石乐为各种类型假人提供高精度传感器技术和先进的内置数据采集解决方案。奇石乐功能丰富的软件使碰撞试验准备和实施快捷便利。...
-

简介:THOR-50M碰撞测试用假人下肢总成同样易于安装和更换。此外,下肢总成在符合多种测试协议规定方面实现了很高的灵活性:若根据US NCAP法规开展测试,可选用THOR-50M小腿总成;而根据EuroNCAP协议开展测试,则可选用...
-

简介:为了尽可能自然地模拟人类在碰撞过程中的真实反应,碰撞测试用假人的腹部由可变形材料制成。两个KIR-TRACC传感器将用来测量相应测量点的腹部表面变形情况。此外,从计量学的角度来看,腹部与盆骨是连接胸腔与下肢...
-

简介:数据记录仪安置在胸腔总成的脊柱盒之中,因此,胸腔总成是DTI仪器配置中的核心组件。总线系统中的线缆均汇合于此,用户可从此处对线缆进行配置。除其他组件外,胸口部位还配置有四个KIR-TRACC传感器,用于记录碰...
-

简介:奇石乐已在海德尔堡生产出首套拟人测试装置(ATD),这是一套一站式完整假人总成解决方案:它采用了最先进的碰撞测试用假人(集成了包括传感器和数据采集系统在内的完整测量链),而且奇石乐将对整个测试系统提供...
-
简介:河北普傲汽车科技有限公司是国内首家拥有自主知识产权的汽车主动安全以及自动驾驶测试目标物和测试系统提供商。河北普傲科技有限公司提供符合中国测试场景的标准化行人AEB测试目标物、标准化自行车AEB测试目标物...
-

简介:机器人安装在驾驶员座位上,自动控制档位和三个踏板,按预先设定好的试验程序进行试验。具有独立于底盘测功机的控制系统,控制程序预设有试验标准中规定的试验循环,用户可在编程平台上方便地自定义其它试验循环...
-

简介:ABD机器人由英国ABD公司研发了一系列计算机控制的车内机器人测试产品,专门用于车辆动态,转向系统和制动系统的测试。除些之外,它们也可以用于其他的测试应用,如耐久性和滥用测试及高级驾驶辅助系统(ADAS)的...
-

简介:ABD CAN-Omni控制器概述Anthony Best Dynamics (ABD) 提供一系列的驾驶机器人,可以为车辆的转向、制动和油门控制提供准确和可重复的输入,应用于各种车辆的开发测试。并为之开发了一套完整的能够进行轻松高效的...
-

简介:ABD软碰撞行人目标用于自动紧急制动AEB测试的可与机器人驾驶车辆同步的可控制行人目标从2016年起,EuroNCAP测试将包含由假人代替真正行人的自动紧急制动(AEB)试验。这种试验需要使用可与测试车辆同步的可控制行...





 广告
广告






































