




 广告
广告





















































自动驾驶基础(八) 之ACC 简介
2018-07-11 10:06:49· 来源:模拟世界

ACC英文全称是“Adaptive Cruise Control”,中文意思是“自适应巡航控制”。 我们先从巡航说起,一般,巡航又分为定速巡航和自适应巡航。
ACC英文全称是“Adaptive Cruise Control”,中文意思是“自适应巡航控制”。 我们先从巡航说起,一般,巡航又分为定速巡航和自适应巡航。
定速巡航是汽车以一定的速度巡航,不需要驾驶员进行操作(踩油门)。定速巡航功能需要一定的速度才能进入,一般情况下,这个速度是可以标定的,比如有些车标定大于50公里的时速才可以进入。进入巡航以后会有一个初始速度,比如50km/h,而且速度是可以通过按钮进行调节的(加,减,快加,快减),巡航的退出也有一系列的条件,比如,踩刹车时就会推出巡航。定速巡航相对来说比较简单,没有复杂的传感器,处理器等。一般情况下,定速巡航只适用于路况较好的情况下,比如高速公路等封闭路况。
自适应巡航(AAC)就比较智能,而且一般在较低的速度下就可以进入巡航。除了高速公路,也能适用于城市路况,走走停停都可以。
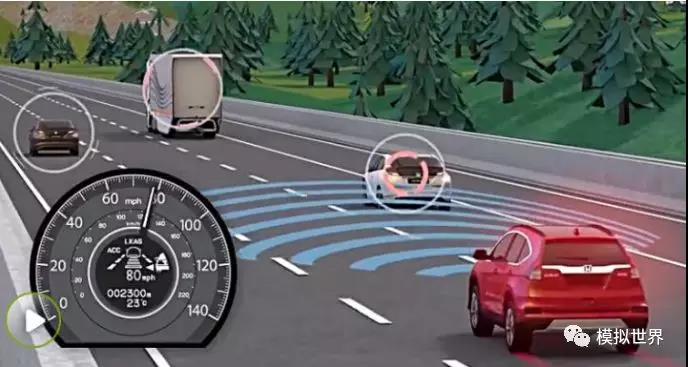
自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。同时车内音响会发出警报声音提醒走神的驾驶员注意,它能有效的防止追尾这类事故的发生。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
简单地说,自适应巡航控制系统,通过汽车的传感器(雷达)采集的距离信息,会根据前车以及本车的行驶状态(车距和速度),经过ECU的计算判断以后向执行器(节气门,制动器,档位等)发送指令,以决定自己的行驶状态,是加速还是减速,还是退出巡航,切换回人工驾驶。自适应巡航最基本功能是保持车辆纵向行驶,在有碰撞危险时,车辆会提示驾驶员并进行主动制动干预。
目前,ACC还属于一项科技含量较高的技术,目前只有像沃尔沃、宝马之类的豪华车配备了ACC。随着汽车底盘零部件集成化和电子化的不断发展,ACC会像如今比较普及的定速巡航系统一样在越来越多的车型中使用,并成为未来主被动安全集成中的重要一环。
如上所述,ACC系统中,传感器的作用是显而易见的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)必须持续扫描车辆前方道路。目前常用的传感器有雷达(长距毫米波雷达和激光雷达等),超声波测距传感器,红外测距传感器,视频传感器等。
在ACC系统中,传感器就相当于驾驶员的“眼睛”。对于眼睛来说,关键是要识别在本车道的前车,排除旁边车道车辆的影响。如果是在城市道路行驶,还必须识别行人等其他可能在道路上出现的目标对象。
眼睛接收到信号后,就传递给汽车大脑中的ACC 巡航控制系统,该系统会查询一系列规章制度,以决定汽车该怎么行驶,这些规章制度就是ACC中的控制策略。
安全车距模型(意思就是汽车跟前车保持多少距离合适)是ACC系统控制的主要控制策略之一;他不能过大,否则会导致你后头车辆的抗议;不能过小,否则有追尾风险;安全车距是最小停车距离与当前车速的函数。安全距离,其实并不是一个固定的长度单位,而是所谓的TTC,time to collsion,即假设保持当前相对速度,两车发生追尾所需要的时间。
在大脑告诉了汽车该怎么做之后,接下来就是执行机构的事了,执行机构相当于汽车的“手脚”。执行机构包括节气门,制动,档位。通过这些机构的动作,对汽车进行操控。
ACC系统,相比于其他的汽车电子控制技术,还略显不成熟。难点,在于对路况适应性。
自适应巡航作为一种驾驶辅助,毕竟不能做到像人一样的智能,能分辨所有的路况,且能做出最优的及时反应。目前ACC还主要用在路况较好的道路(高速或高架),而且是主要针对主车道目标车辆的判断。而对于旁车道,以及多目标车辆的监测;有并线意图的车辆的预判,还做得不足。比如前车突然进入弯道,这时本车可能会认为安全距离过大,出现误判而突然加速进入弯道。
以下是一些典型路况的分析:
1. 当前方没有车辆,ACC会以一定的速度巡航(巡航的车速在你设定的车速限值范围内);
2. 当雷达监测范围内出现车辆时,如果车速过高,此时汽车会减速,并一定的车速跟随前车行驶,保持安全距离;若前车又切出本车道,则本车会自动加速至设定车速。
ACC 巡航控制系统中,对于定速巡航的状态,控制电控单元有两个输入信号,当测出的实际车速高于或低于驾驶员调定的车速时,电控单元将这两种信号进行比较,得出两信号之差,即误差信号,再经放大、处理后成为油门控制信号,送至油门执行器,驱动油门执行器动作,调节发动机油门开度,以修正两输入车速信号的误差,从而使实际车速很快恢复到驾驶员设定的车速,并保持恒定。 如下图,前方车道无车,此时车速是80km/h,做定速巡航。
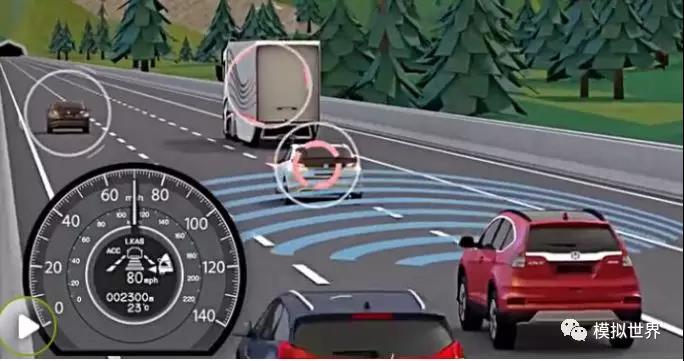
而下图中,,前方车道出现车辆,ACC做自适应巡航控制,根据前车车速以及和前车的车距,做自适应巡航车速控制,车速下降。
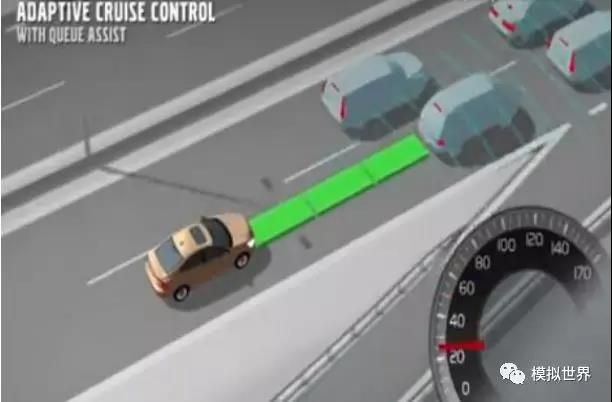
当前车变向时,汽车会更换跟车目标;另外,有些ACC自适应巡航系统带停走功能(自动启停系统,Start Stop),会在汽车低速,甚至静止也能启用,这点在走走停停的城市工况比较有用。该系统在低速时仍能够保持与前车的距离,并能够对汽车制动,直至静止,在几秒后,如果前车起动,ACC也会自动跟随启动;如果停留时间较长,只需驾驶员轻踩踏板则能够再次进入巡航模式;
要实现带停走功能的ACC,通常还需要摄像头的辅助,因为雷达识别目标的能力虽然强,但是受到杂波干扰非常厉害,还是需要摄像头的图像识别功能来确认目标。而Mobileye公司的产品甚至可以只用摄像头实现ACC。同时,跟车到停车以后,绝大部分厂商的策略是必须由驾驶员确认之后才能再次起步,可以是按键确认,也可以是踩油门确认。下图中为城市工况,此时车速25km/h:

如下图是等红灯时,汽车能自动刹车,车速降为0,前车起动后,本车自动跟随起动。

如果进入弯道时,汽车会根据弯道的情况而调整车速;长距雷达的视野较小,弯道半径过大可能会丢失目标,所以目前最高等级的ACC也仅对150m以上的弯道半径做性能要求。
自适应巡航定速控制系统的雷达传感器如果只能检测车辆前面狭窄的锥形区域内的物体,那么,对障碍物的检测可能会受到限制。系统可能无法及时制动,或有可能意外制动。
如果其他车辆正在驶入和驶出ACC 车辆所在的车道,则这些车辆只有在完全处于相应车道上时才会被检测到。有时候无法检测到或无法及时检测到很窄或很小的车辆。如果是投影较大的车辆(例如木材运输车),则无法正确检测到该车的尾部。
说到ACC的优点,显然,在一定程度上,ACC可以减轻驾驶员驾驶的疲劳。ACC系统加上车道偏离辅助系统,可以让你在较好的城市路况中极大的解放双脚甚至双手。
ACC作为智能驾驶技术,将会是未来汽车发展方向,就像无人驾驶一样,然而机器始终是机器,并不能完全代替人类,再智能的驾驶也只是辅助驾驶,不能完全依赖和信任。而且AAC功能的性能很大程度上依赖于车载传感器, 特别是雷达的检测距离和检测精度。后文我们会对雷达做详细介绍, 包括毫米波雷达和激光雷达。
定速巡航是汽车以一定的速度巡航,不需要驾驶员进行操作(踩油门)。定速巡航功能需要一定的速度才能进入,一般情况下,这个速度是可以标定的,比如有些车标定大于50公里的时速才可以进入。进入巡航以后会有一个初始速度,比如50km/h,而且速度是可以通过按钮进行调节的(加,减,快加,快减),巡航的退出也有一系列的条件,比如,踩刹车时就会推出巡航。定速巡航相对来说比较简单,没有复杂的传感器,处理器等。一般情况下,定速巡航只适用于路况较好的情况下,比如高速公路等封闭路况。
自适应巡航(AAC)就比较智能,而且一般在较低的速度下就可以进入巡航。除了高速公路,也能适用于城市路况,走走停停都可以。
自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。同时车内音响会发出警报声音提醒走神的驾驶员注意,它能有效的防止追尾这类事故的发生。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
简单地说,自适应巡航控制系统,通过汽车的传感器(雷达)采集的距离信息,会根据前车以及本车的行驶状态(车距和速度),经过ECU的计算判断以后向执行器(节气门,制动器,档位等)发送指令,以决定自己的行驶状态,是加速还是减速,还是退出巡航,切换回人工驾驶。自适应巡航最基本功能是保持车辆纵向行驶,在有碰撞危险时,车辆会提示驾驶员并进行主动制动干预。
目前,ACC还属于一项科技含量较高的技术,目前只有像沃尔沃、宝马之类的豪华车配备了ACC。随着汽车底盘零部件集成化和电子化的不断发展,ACC会像如今比较普及的定速巡航系统一样在越来越多的车型中使用,并成为未来主被动安全集成中的重要一环。
如上所述,ACC系统中,传感器的作用是显而易见的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)必须持续扫描车辆前方道路。目前常用的传感器有雷达(长距毫米波雷达和激光雷达等),超声波测距传感器,红外测距传感器,视频传感器等。
在ACC系统中,传感器就相当于驾驶员的“眼睛”。对于眼睛来说,关键是要识别在本车道的前车,排除旁边车道车辆的影响。如果是在城市道路行驶,还必须识别行人等其他可能在道路上出现的目标对象。
眼睛接收到信号后,就传递给汽车大脑中的ACC 巡航控制系统,该系统会查询一系列规章制度,以决定汽车该怎么行驶,这些规章制度就是ACC中的控制策略。
安全车距模型(意思就是汽车跟前车保持多少距离合适)是ACC系统控制的主要控制策略之一;他不能过大,否则会导致你后头车辆的抗议;不能过小,否则有追尾风险;安全车距是最小停车距离与当前车速的函数。安全距离,其实并不是一个固定的长度单位,而是所谓的TTC,time to collsion,即假设保持当前相对速度,两车发生追尾所需要的时间。
在大脑告诉了汽车该怎么做之后,接下来就是执行机构的事了,执行机构相当于汽车的“手脚”。执行机构包括节气门,制动,档位。通过这些机构的动作,对汽车进行操控。
ACC系统,相比于其他的汽车电子控制技术,还略显不成熟。难点,在于对路况适应性。
自适应巡航作为一种驾驶辅助,毕竟不能做到像人一样的智能,能分辨所有的路况,且能做出最优的及时反应。目前ACC还主要用在路况较好的道路(高速或高架),而且是主要针对主车道目标车辆的判断。而对于旁车道,以及多目标车辆的监测;有并线意图的车辆的预判,还做得不足。比如前车突然进入弯道,这时本车可能会认为安全距离过大,出现误判而突然加速进入弯道。
以下是一些典型路况的分析:
1. 当前方没有车辆,ACC会以一定的速度巡航(巡航的车速在你设定的车速限值范围内);
2. 当雷达监测范围内出现车辆时,如果车速过高,此时汽车会减速,并一定的车速跟随前车行驶,保持安全距离;若前车又切出本车道,则本车会自动加速至设定车速。
ACC 巡航控制系统中,对于定速巡航的状态,控制电控单元有两个输入信号,当测出的实际车速高于或低于驾驶员调定的车速时,电控单元将这两种信号进行比较,得出两信号之差,即误差信号,再经放大、处理后成为油门控制信号,送至油门执行器,驱动油门执行器动作,调节发动机油门开度,以修正两输入车速信号的误差,从而使实际车速很快恢复到驾驶员设定的车速,并保持恒定。 如下图,前方车道无车,此时车速是80km/h,做定速巡航。
而下图中,,前方车道出现车辆,ACC做自适应巡航控制,根据前车车速以及和前车的车距,做自适应巡航车速控制,车速下降。
当前车变向时,汽车会更换跟车目标;另外,有些ACC自适应巡航系统带停走功能(自动启停系统,Start Stop),会在汽车低速,甚至静止也能启用,这点在走走停停的城市工况比较有用。该系统在低速时仍能够保持与前车的距离,并能够对汽车制动,直至静止,在几秒后,如果前车起动,ACC也会自动跟随启动;如果停留时间较长,只需驾驶员轻踩踏板则能够再次进入巡航模式;
要实现带停走功能的ACC,通常还需要摄像头的辅助,因为雷达识别目标的能力虽然强,但是受到杂波干扰非常厉害,还是需要摄像头的图像识别功能来确认目标。而Mobileye公司的产品甚至可以只用摄像头实现ACC。同时,跟车到停车以后,绝大部分厂商的策略是必须由驾驶员确认之后才能再次起步,可以是按键确认,也可以是踩油门确认。下图中为城市工况,此时车速25km/h:
如下图是等红灯时,汽车能自动刹车,车速降为0,前车起动后,本车自动跟随起动。
如果进入弯道时,汽车会根据弯道的情况而调整车速;长距雷达的视野较小,弯道半径过大可能会丢失目标,所以目前最高等级的ACC也仅对150m以上的弯道半径做性能要求。
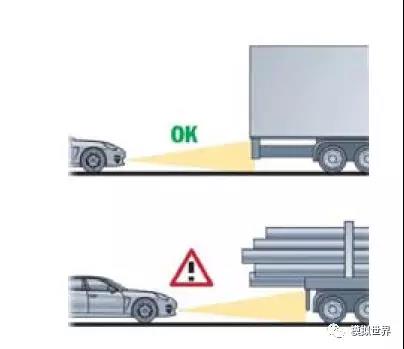
自适应巡航定速控制系统的雷达传感器如果只能检测车辆前面狭窄的锥形区域内的物体,那么,对障碍物的检测可能会受到限制。系统可能无法及时制动,或有可能意外制动。
如果其他车辆正在驶入和驶出ACC 车辆所在的车道,则这些车辆只有在完全处于相应车道上时才会被检测到。有时候无法检测到或无法及时检测到很窄或很小的车辆。如果是投影较大的车辆(例如木材运输车),则无法正确检测到该车的尾部。
说到ACC的优点,显然,在一定程度上,ACC可以减轻驾驶员驾驶的疲劳。ACC系统加上车道偏离辅助系统,可以让你在较好的城市路况中极大的解放双脚甚至双手。
ACC作为智能驾驶技术,将会是未来汽车发展方向,就像无人驾驶一样,然而机器始终是机器,并不能完全代替人类,再智能的驾驶也只是辅助驾驶,不能完全依赖和信任。而且AAC功能的性能很大程度上依赖于车载传感器, 特别是雷达的检测距离和检测精度。后文我们会对雷达做详细介绍, 包括毫米波雷达和激光雷达。
- 下一篇:自动驾驶基础(九) 之APS 简介
- 上一篇:自动驾驶基础(七)ADAS技术及产品



 广告
广告 


最新资讯
-
使用 HEADlab 测量电流
2026-01-23 17:13
-
奇石乐持续推进全球碳中和战略
2026-01-23 16:47
-
吉利汽车,新公司落户湖北!
2026-01-23 16:12
-
直播|车载光通信技术路线及测试挑战
2026-01-23 13:05
-
重磅!工信部明确新车准入须开展30000km可
2026-01-23 13:05
