




 广告
广告





















































智能汽车测试技术:环境感知系统的测试技术与方法(二、测试技术框架及各类感知环境介绍)

智能汽车是汽车、电子、信息通信、道路交通运输等行业深度融合的新型产业形态。当前, 我国智能汽车产业进入快车道, 技术创新日益活跃, 新型应用蓬勃发展, 产业规模不断扩大,而相应的测试技术体系也在不断完善, 推动产业进步。本书首先立足于整体现状对智能汽车测试体系架构进行综述, 并针对测试技术的发展趋势和整个核心技术进行详细描述;然后, 针对测试体系中每一测试过程的概念、核心思想、关键技术、测试方法、发展趋势等进行详细描述。
本书可供智能汽车设计人员及测试人员阅读使用, 也可供车辆工程专业及相关专业师生阅读参考。
本文是《智能汽车测试技术》系列文章第二篇,上一篇智能汽车测试技术:环境感知系统的测试技术与方法(一、需求分析及系统介绍)
注:本文节选自《智能汽车测试技术》,由机械工业出版社于2025年6月份出版
《智能汽车测试技术》目录
第1 章
导论
1.1 背景与需求/ 001
1.2 基本概念/ 003
1.2.1 测试与评价的基本概念/ 003
1.2.2 产品全生命周期中的测评技术/ 004
1.3 现状与挑战/ 005
1.4 本书章节安排/ 006
第2 章
智能汽车
测评概述
2.1 测评需求分析/ 009
2.1.1 安全性测试与验证/ 009
2.1.2 智能性测试与评价/ 012
2.2 测试方法论/ 015
2.2.1 安全性测试验证框架/ 015
2.2.2 智能性测试评估框架和体系/ 017
2.3 测试工具链及应用要求/ 023
2.3.1 测试工具链/ 023
2.3.2 测试需求与测试工具的适配性/ 027
2.4 本章小结/ 029
参考文献/ 030
第3 章
智能汽车
测试场景
3.1 场景基本概念/ 031
3.2 场景体系/ 033
3.2.1 场景要素与属性/ 033
3.2.2 场景层级/ 035
3.2.3 场景分类/ 036
3.3 场景生成方法/ 037
3.3.1 基于形式化描述的场景生成方法/ 037
3.3.2 基于驾驶员模型的场景生成方法/ 040
3.3.3 安全关键场景生成方法/ 048
3.4 场景采集与利用/ 051
3.4.1 场景采集技术/ 051
3.4.2 场景库搭建/ 052
3.5 本章小结/ 052
参考文献/ 053
第4 章
环境感知
系统的测试
技术与方法
4.1 环境感知系统测试需求分析/ 055
4.2 环境感知系统介绍/ 057
4.2.1 感知系统/ 057
4.2.2 硬件模组/ 058
4.2.3 认知算法/ 058
4.3 环境感知系统测试技术框架/ 059
4.4 各类感知环境介绍/ 060
4.4.1 封闭场地环境/ 060
4.4.2 道路交通环境/ 064
4.4.3 虚拟仿真环境/ 066
4.5 数据生成模型介绍/ 069
4.5.1 降雨图像生成方法概述/ 070
4.5.2 降雨图像生成模型介绍/ 071
4.5.3 降雨图像生成模型结果/ 075
4.6 具体测试案例/ 076
4.6.1 案例一:基于封闭场地环境的感知系统测试/ 076
4.6.2 案例二:基于虚拟仿真环境的硬件模组测试/ 078
4.6.3 案例三:基于虚拟仿真环境的感知系统测试/ 081
4.6.4 案例四:基于三类感知环境和数据生成模型的
认知算法测试/ 083
4.7 本章小结/ 086
参考文献/ 087
第5 章
决策规划
系统的测试
技术与方法
5.1 决策规划系统的测试需求与挑战/ 089
5.1.1 测试需求/ 089
5.1.2 测试挑战/ 090
5.2 基于场景的测试技术与方法/ 092
5.2.1 静态试验设计测试方法/ 092
5.2.2 动态试验设计测试方法/ 094
5.3 基于真实里程的测试技术与方法/ 101
5.3.1 开放道路测试技术/ 101
5.3.2 重要度采样加速测试方法/ 103
5.4 基于虚拟里程的测试技术与方法/ 104
5.4.1 虚拟里程测试系统组成框架/ 105
5.4.2 用于虚拟里程测试的NPC 模型生成方法/ 106
5.4.3 用于虚拟里程测试的NPC 模型性能验证/ 113
5.4.4 虚拟里程测试的应用/ 118
5.4.5 小结/ 130
5.5 其他测试技术/ 131
5.5.1 自动化测试技术/ 131
5.5.2 错误注入测试技术/ 139
5.5.3 分布式自动化测试技术/ 152
5.6 本章小结/ 157
参考文献/ 157
第6 章
整车测试
技术与方法
6.1 整车测评需求分析/ 159
6.2 封闭测试场地平台/ 160
6.2.1 封闭测试场/ 160
6.2.2 动态模拟目标物系统/ 162
6.2.3 定位与数据采集系统/ 163
6.3 开放道路测试系统/ 164
6.3.1 测试方案制定/ 165
6.3.2 数据采集与数据闭环系统/ 165
6.4 本章小结/ 166
第7 章
智能汽车
安全性评估
7.1 基于具体场景的安全性评估/ 169
7.1.1 场景瞬时风险评估方法/ 170
7.1.2 多阶段安全评估/ 180
7.1.3 单个测试场景结果外推/ 181
7.2 基于逻辑场景的安全性评估/ 182
7.2.1 评估要求/ 182
7.2.2 面向逻辑场景评价的危险域识别方法/ 183
7.3 针对被测功能的安全性评估/ 192
7.4 本章小结/ 192
参考文献/ 193
第8 章
智能汽车
综合行驶
性能评估
8.1 测评需求与研究现状/ 195
8.1.1 测评需求/ 195
8.1.2 研究现状/ 195
8.2 测评基本流程/ 197
8.3 典型测试场景矩阵/ 198
8.4 测试方法与流程/ 199
8.4.1 测试方案/ 199
8.4.2 背景车跟驰模型/ 199
8.4.3 测试数据输出/ 201
8.5 评价方法与流程/ 202
8.5.1 评价体系/ 202
8.5.2 评价流程/ 204
8.6 测评示例/ 206
8.7 本章小结/ 209
参考文献/ 209
附 录
附录A 测试工况参数设置/ 210
附录B 背景车跟驰模型/ 212
附录C 归一化方法/ 214
附录D 常见缩写词/ 216
4. 3 环境感知系统测试技术框架
本章主要讨论针对前向环境感知系统(如1V,即1个前向视觉传感器)的测试技术,其他如负责定位功能的感知系统测试,可以参考本章所提出的测试技术框架。针对前向环境感知系统的测试技术分为从被感知对象所处环境获取数据和被测对象选取两大部分,中间借助相关辅助工具完成测试流程。如图4-3中的序号①~③所示,可以直接在道路交通环境和封闭场地环境中针对被测感知系统开展测试,也可以基于虚拟仿真环境并额外使用如摄像头光学暗箱或毫米波雷达仿真暗箱等工具,对该感知系统进行测试;如图4-3中的序号④~⑥所示, 可以使用数据采集系统从各类环境中获取待测感知数据, 随后进一步输入给被测对象; 对于虚拟仿真环境还可以在环境中使用虚拟传感器模型直接输出待测感知数据, 即序号⑦; 另外, 如图4 -3 的序号⑧所示, 使用数据生成模型也可以直接得到待测感知数据用于测试。
在图4-3 中, 一条从获取数据到获得认知结果的包含完整流程的连线, 即构成一种测试技术。在本章后续的小节中, 4.4 节将介绍各类被感知对象所处环境, 4.5 节将对数据生成模型展开介绍, 4.6 节将对若干具体测试案例展开介绍。
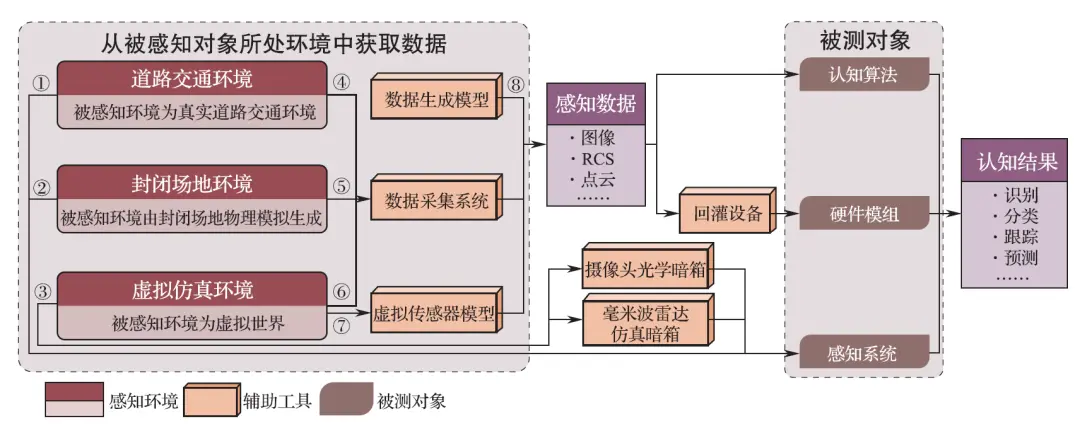
图4 -3 环境感知系统测试技术框架
4. 4 各类感知环境介绍
基于4.3 节的环境感知系统测试技术框架, 被感知对象所处的不同环境在一定程度上决定了整体的测试流程和所需使用的辅助工具。本章将对4. 3 节中列举的各类感知环境进行介绍, 包括封闭场地环境、道路交通环境和虚拟仿真环境。
4.4.1 封闭场地环境
封闭场地环境依托专门建设的封闭测试场地。封闭测试场地强调环境和场景的还原和模拟能力, 采用柔性化设计, 保证感知系统能够在有限的场地条件下, 尽可能多地经历不同环境和场景的测试, 从而不断积累测试数据, 为智能汽车技术迭代提供有力支撑。封闭场地生成基于测试需求和封闭测试场地的特点, 有针对性地直接构建测试用例, 因此其弊端为生成效率低、成本高, 并且存在一定的风险, 针对封闭测试场地详细的介绍可见本书2.3 节。封闭测试场地需要在有限的范围内尽可能在多方面模拟真实道路环境, 从而更好地服务于感知系统测试, 因此需要重点考虑以下三个方面: 道路环境模拟、气象条件模拟和交通参与要素模拟。
1 . 道路环境模拟
道路环境通常不是感知系统直接的感知目标, 但其在很大程度上会对感知结果造成影响, 如易扬尘道路会干扰传感器感知, 环岛和T 形路口会造成不同的感知盲区等。为满足在各种道路路面下的测试需求, 封闭测试场地应具有沥青路、水泥路、砖石路、砂石路、泥土路等多种材质路面, 道路设计和铺设应满足公路工程和道路设计相关标准。美国密歇根的Mcity测试场地[9] 即由多种路面和道路元素构成。它包含水泥、柏油、仿真砖等铺装路面, 还有泥土、碎石等非铺装路面。瑞典的AstaZero封闭测试场地由五个区域组成[10] , 包括不同道路类型, 分别是多车道测试区域、由四个街区组成的城市区域、高速道路测试区域、农郊道路和主试验中心, 通过不同区域的组合可以模拟几乎全部道路交通模式及场景。国家智能网联汽车(长沙) 测试区(以下简称长沙测试区)也涵盖多种测试道路, 包括高速、城市、乡村、越野等, 如图4 -4 所示。
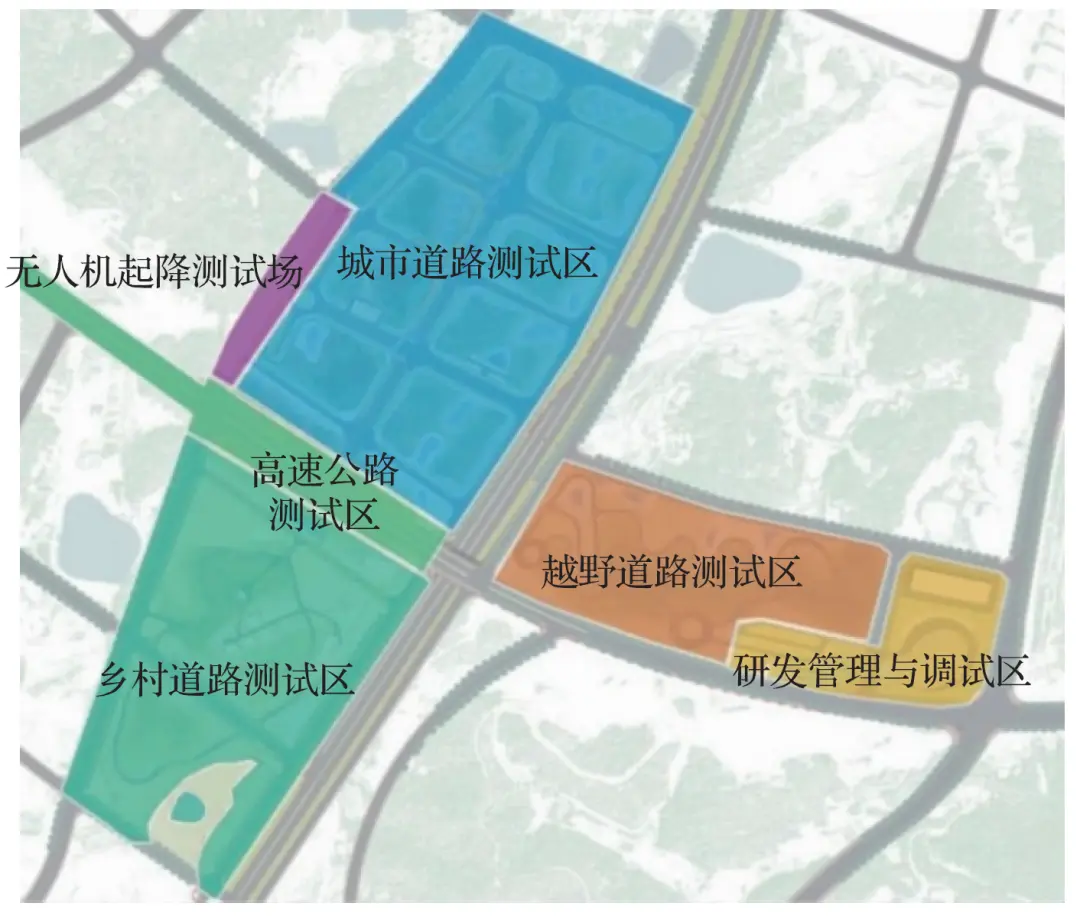
图4-4 长沙测试区
除测试场地的路面条件需要尽可能贴近真实道路外,测试场地还需包含其他道路元素信息,如交通标志、车道线、信号灯、人行横道、指示牌、减速带等,这些要素同样需复刻真实道路环境。
封闭测试场地中不同的道路类型也是生成多样化场景的必要条件之一,与路面条件模拟类似,不同道路类型的模拟同样需要参照相关标准构建以满足对真实道路类型的复刻。美国Mcity测试场模拟了隧道、环岛、交通管制区、施工区等道路元素。长沙测试区模拟了隧道、十字路口、T形路口、环岛等道路元素,如图4-5所示。

图4 -5 长沙测试区不同道路类型
为更好地还原真实世界场景,道路环境模拟中还需要对道路周边要素进行还原,如路边建筑、加油站、停车场等。例如,在美国Mcity测试场地,其城市场景设计有可移动的房屋外墙,墙体材料均取自真实建筑,如玻璃、砖、木头、氯乙烯等,用于模拟传感器对于不同材料的不同反馈,并且还有多种停车位可供选择,如侧方停车、倒车入库和斜对角停车等。该测试场地还在市中心区域设置有邮箱、消防栓、候车椅、计时码表等自动驾驶车辆在真实世界中会遇到的道路元素,用于测试它们的应对状况。
另外,除常规行车场景外,如循线行驶、通过各类路口、斜坡等,封闭测试场还可以特别设计一些用于测试传感器的场景。如美国Mcity的人造树荫区域,可以用于测试传感器信号被削弱、遮蔽和延迟对于自动驾驶车辆的影响;Mcity内还有故意做旧的道路标牌,用来测试图像处理系统等。
2. 气象条件模拟
自然气象条件如雨、雾、雪等,具有地域性和季节性的特点,其发生时间、持续时间、强度大小等均不受人为控制。通过在封闭测试场地内搭建相关气象条件模拟设备,能够规避以上测试时遇到的问题,从而提高测试效率、降低测试成本。
美国弗吉尼亚SmartRoad的天气模拟系统是该封闭测试场的特色之一[11] 。如图4-6所示,测试场中75个天气塔可以产生雨、雪和雾。天气塔中的水来源于一个容量为189万L的水箱,它们可以在适宜的天气环境下在0.8km的道路范围内产生特定的天气:如雨量为每小时2~64mm的降雨天气;能见度在3~91m范围内变化的雾天;以及雪量为每小时102mm的降雪天气。日本J⁃town的特殊环境试验区可以在室内复现雨、雾等气候条件,能够实现暴雨、大暴雨及特大暴雨的模拟,同时环境中还设置了如隔离栏、交通信号灯等其他交通元素,能够组合实现多种降雨环境下的测试场景。
长沙测试区内专门搭建了一系列能够带来危害的特殊气候环境的模拟设施,能够实现雨天、雾天、扬尘等模拟,如图4-7所示。

图4 -6 美国弗吉尼亚SmartRoad测试场天气模拟系统

图4-7 长沙测试区气候环境模拟设施
除雨、雾、雪等天气条件外,光照条件的模拟同样是测试用例生成的关键条件之一。美国SmartRoad测试场内配有可变照明设施,用以研究光照条件对传感器的影响。它可以复现95%的美国公路照明系统,采用了变间距设计,光源有包括发光二极管模块在内的多种灯具头可选。能见度测试系统包括静态和动态两个路段,用于测试路面标记和其他对象的可见性。Mcity测试场地有贯穿整个测试场的各类照明设施。长沙测试区内也搭建有光照模拟设备,如图4-8所示。

图4 -8 长沙测试区光照模拟设备
3. 交通参与要素模拟
常见的交通参与要素包括隐蔽的障碍物、行人、动物、汽车等,在封闭测试场地内常通过假人、气球车等进行模拟。如瑞典AstaZero测试场即模拟了假人以及大型动物模型、可远程控制的气球车等。图4-9所示为AstaZero在乡村区域的大型动物场景模拟。

图4 -9 AstaZero 在乡村区域的大型动物场景模拟
4 4 2 道路交通环境
道路交通环境是指真实的道路环境,可以直接对被测系统在该环境中进行测试,也可以从该环境中获取待测数据再进行测试。待测数据获取的流程为:首先在真实道路上采集一定时长的自然驾驶数据;然后对采集得到的数据结果进行后处理,如场景划分、摄像头图像生成、点云生成等;最后对数据进行标注、整理,即完成待测数据的获取。现阶段已有较多开源数据集是通过从道路交通环境中获取自然驾驶数据,后经加工得到的,下面将对几个典型的数据集进行介绍。
1.KITTI数据集
KITTI数据集[12] 是由德国卡尔斯鲁厄理工学院和丰田工业大学芝加哥分校联合构建的用于自动驾驶领域研究的数据集。采集地点位于德国卡尔斯鲁厄,采集时长为6h,采集数据共划分为城市、乡村、道路、校园、行人五大类,如图4-10所示。数据采集平台装配有2个灰度摄像头、2个彩色摄像头、4个光学镜片、1个64线旋转激光雷达和1个组合惯导系统。经人工处理后,KITTI数据集共包含原始和同步矫正处理后的灰度图像、彩色图像、激光雷达点云数据、组合惯导数据(位置、速度、加速度等)、矫正文件、3D目标检测标签。

图4-10 KITTI数据集
2.nuScenes数据集
nuScenes数据集[13] 是由Motional团队开发的大规模自动驾驶公共数据集,如图4-11所示。数据采集地点为具有密集交通环境和极具挑战性驾驶环境的波士顿和新加坡,收集大约15h的驾驶数据,经专家筛选后得到1000个驾驶场景。每个场景的持续时间为20s,每个场景内同时包含数十个对象,不同场景之间的天气条件、车辆类型、道路标记、植被环境等均有所不同。数据采集平台上配备了多种传感器,包括6个摄像头、1个激光雷达、5个毫米波雷达,以及GPS和惯性测量单元(IMU)。完整的数据集包含近140万张图片、39万个激光雷达扫频数据、140万个毫米波雷达扫频数据和4万个关键帧中的140万个目标包围盒。

图4-11 nuScenes数据集
3.Waymo数据集
Waymo数据集[14] 是谷歌母公司Alphabet旗下的自动驾驶公司Waymo开源的自动驾驶数据集,如图4-12所示。数据集中涵盖了菲尼克斯市(又称凤凰城)、亚利桑那州、柯克兰市、华盛顿州、山景城、旧金山等共25个城市和地区,同时有各种天气条件下的数据,包括白天和夜晚、黎明和黄昏、晴天和雨天等。数据采集平台为Waymo的自动驾驶车辆,其上配备了1个中程激光雷达、4个短程激光雷达、5个摄像头用于采集数据。数据集中有1000个场景片段的激光雷达数据和摄像头图像数据,每个片段时间长度为20s。数据标注方面,Waymo数据集将目标对象分为4类:车辆、行人、骑行者和交通标志,总共标注了1200万个3D边界框和120万个2D边界框。

图4 -12 Waymo 数据集
4 4 3 虚拟仿真环境
虚拟仿真环境是指在虚拟仿真测试软件中模拟汽车复杂的行驶环境,如极端天气、复杂交通参与者等,进而生成待测场景和数据。经虚拟仿真环境的生成方法可以摆脱对真实环境和硬件的需求,其生成效率高,生成成本和下一步进行测试的风险较低。但其仍有一定缺陷,一方面,所获取的待测数据的效果严重依赖传感器模型和环境模型的正确性,不正确或错误的仿真模型将导致不真实的结果,从而对下一步的测试造成影响;另一方面,在仿真环境中难以快速还原现实场景,需要软件开发团队有针对性地提升场景渲染的真实度。现阶段已有较多的数据集是通过虚拟仿真生成的方式构建的,下面将对几个典型的数据集进行介绍。
1. SHIFT
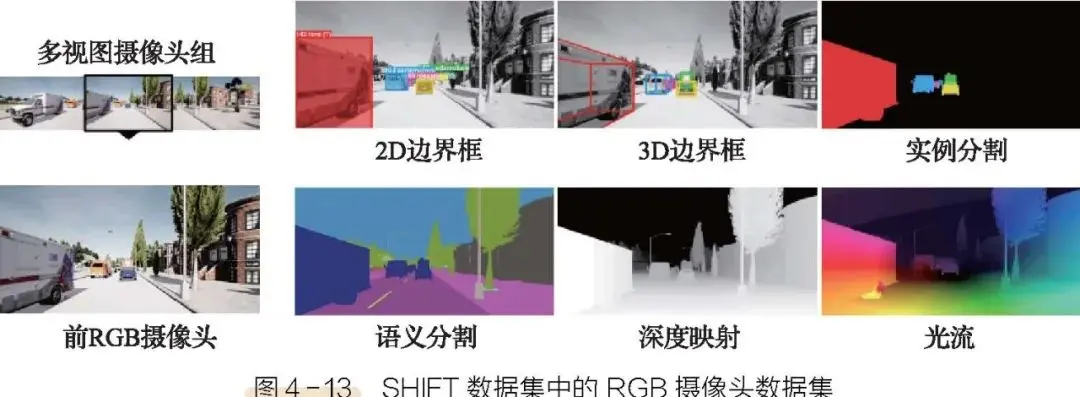
SHIFT[15] 是由苏黎世联邦理工学院视觉智能和系统组构建的数据集,是目前最大的自动驾驶多任务合成数据集,同时提供最全面的注释和条件。它包含云、雨和雾的强度大小,以及一天中连续时间内的车辆和行人密度的离散和连续变化情况,进而捕捉现实世界不断变化的本质。SHIFT是在CARLA虚拟仿真软件中收集的,它包括全面的传感器套件,能够覆盖最重要的感知任务。SHIFT从8个不同位置的多视图传感器套件捕获了4800多个序列。针对多任务驾驶系统,该数据集可以支持13个感知任务:语义/实例分割、单目/立体深度回归、2D/3D物体检测、2D/3D多物体跟踪(MOT)、光流估计、点云配准、视觉里程计、轨迹预测和人体姿态估计。SHIFT数据集中的RGB摄像头数据集如图4-13所示。
2.Livox仿真数据集
Livox仿真数据集是基于自动驾驶仿真测试平台生成的点云数据和对应标注,支持3D目标检测和语义分割任务。其中传感器配置了5个浩界Horizon激光雷达和1个泰览Tele⁃15超远距激光雷达,整个数据集包含14445帧360°Lidar点云数据,6种目标的3D包围框标注和14种类别的点云语义标注。目前开放下载的数据集场景主要为市区宽阔道路场景,包括双向12车道和双向8车道。相应地,该仿真场景中也包含多种车辆和行人模型,以及更贴近真实场景的交通流模拟。此外,丰富的交通信号灯、交通标识牌、隔离物(包括隔离栏杆、绿化带、隔离墩等)、树木建筑等都让整个仿真场景更加贴近实际驾驶路况。仿真场景示例和数据标注示例如图4-14和图4-15所示。

图4 -14 仿真场景示例
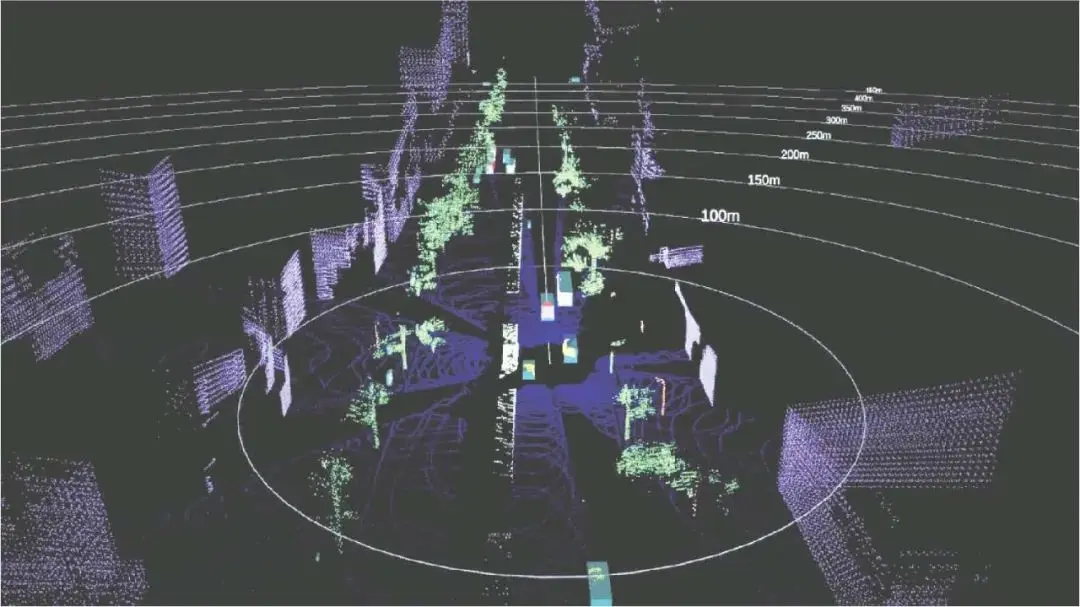
图4-15 数据标注示例
3.51WORLD虚拟标注数据集
51WORLD虚拟标注数据集是基于其自研的自动驾驶仿真测试平台51Sim⁃One生成及标注的。51Sim⁃One场景如图4-16所示。在51WORLD虚拟标注数据集中,主要包含由51Sim⁃One所产生的摄像头传感器相关数据和激光雷达传感器相关数据。摄像头传感器相关数据主要包括图像和对应的语义分割、实例分割、深度标注、目标检测标注;激光雷达传感器相关数据主要包括激光点云和对3D边界框标注、语义分割标注、实例分割标注。51WORLD虚拟标注数据集内容丰富且全面,可满足图像目标检测、点云目标检测、融合目标检测、光流、实例分割、语义分割和深度预测等算法研究的需求。

图4-16 51Sim⁃One场景
4. OPV2V
OPV2V(OpendatasetforPerceptionwithV2Vcommunication)是由加州大学洛杉矶分校Mobility实验室构建的数据集[16] 。该数据集是第一个用于车对车感知的大规模开放模拟数据集,包含70多个场景、11464个帧和232913个有注释的三维车辆边界框,收集自CARLA的8个城镇和洛杉矶卡尔弗城的一个数字城镇。数据集中,每一帧平均包含3个联网车辆,每个联网车辆配备了4个摄像头,总共可以覆盖360°视角,同时配备了64通道激光雷达和GPS/IMU传感器。OPV2V可以支持协同3D目标检测、纯电动汽车(BEV)语义分割、跟踪和预测等感知任务。OPV2V数据集示例如图4-17所示。
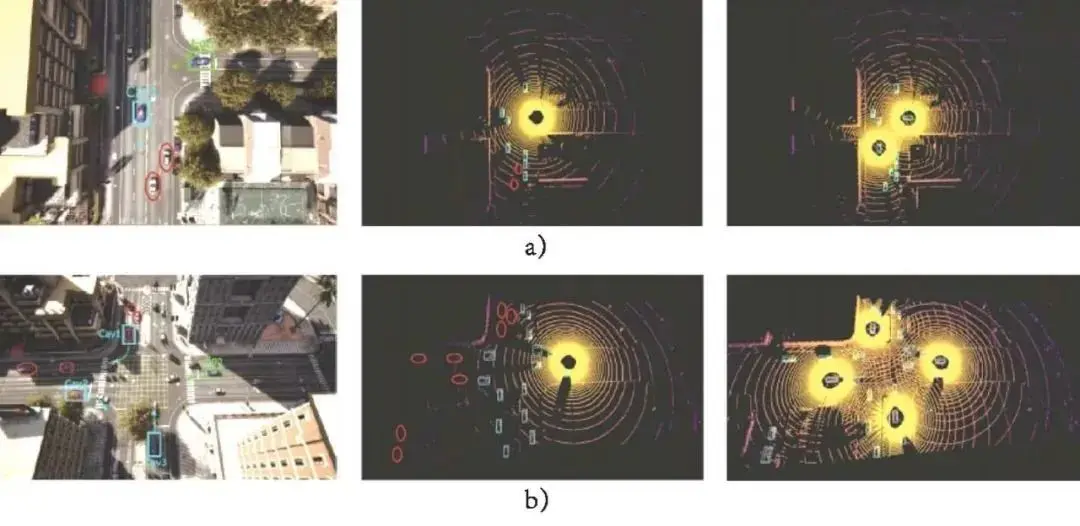
图4 -17 OPV2V 数据集示例
本书首先立足于整体现状对智能汽车测试体系架构进行综述, 并针对测试技术的发展趋势和整个核心技术进行详细描述;然后, 针对测试体系中每一测试过程的概念、核心思想、关键技术、测试方法、发展趋势等进行详细描述。
本书可供智能汽车设计人员及测试人员阅读使用, 也可供车辆工程专业及相关专业师生阅读参考。
作者简介:
陈君毅,2009年毕业于同济大学汽车学院,获工学博士学位,任职于同济大学汽车学院。长期从事自动驾驶汽车测试与评价方向研究工作,先后主持和参与国家级、省部级项目共11项,并与华为、路特斯、上汽大众、蔚来等企业开展了深度校企合作研究。近5年,在国内外学术期刊和国际会议上共发表SCI/EI检索论文近30篇,其中以第一作者或及通讯作者发表的为20余篇;申请发明专利30余项(已授权7项)。担任SAE汽车安全和网络安全技术委员会秘书、功能安全和预期功能安全分委会主席;是自动驾驶测试场景国际标准(ISO3450X)支撑专家组成员,以及CAICV联盟预期功能安全工作组核心成员;担任《汽车工程》和《汽车工程学报》青年编委委员,IEEE Transactions on Intelligent Vehicles、Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering、《中国公路学报》、《汽车工程》、IEEE Intelligent Transportation Systems Conference、IEEE Intelligent Vehicles Symposium等国内外期刊和国际会议审稿人,曾于多项国际学术会议担任分论坛主席。
版权信息:
智能汽车测试技术 / 陈君毅等著. -- 北京 : 机械工业出版社, 2025. 5. -- (智能汽车关键技术丛书).ISBN 978-7-111-77871-4 Ⅰ. U467 中国国家版本馆CIP数据核字第2025X8D229号
本书由机械工业出版社出版,本文经出版方授权发布。



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
