




 广告
广告





















































基于自然驾驶场景的驾驶员主观风险认知数据集

编者按 实现与人类驾驶员认知相协调的决策对于智能驾驶技术的社会接受度具有决定性作用。为此,有必要在智能驾驶决策规划系统的开发与测试中,引入与驾驶员主观认知相关的数据。然而,现有自然驾驶数据集主要关注传感器或车辆运动轨迹数据,较少包含与人类认知相关的信息。为此,我们研究构建了驾驶员主观风险认知数据集(Risk-Informed Subjective evaluation and Eye-tracking,RISEE数据集),其中包含驾驶员风险认知及眼动信息。基于179个仿真重建的高交互自然驾驶场景,通过驾驶模拟器实验共采集到101名被试者的有效数据,包括3567条主观风险评估数据和2045条高质量眼动数据等,支持「以人为本」的智能驾驶研发。RISEE数据集相关内容见网站:https://ivtest-lab.github.io/RISEE_dataset/。开源数据包含自然驾驶场景的地图数据(xodr文件)、车辆轨迹数据(csv文件)、主观风险评估均值(xlsx文件),以及被试者的眼动数据(csv文件)等,数据正在持续更新中。
内容概览
1. 背景
2. RISEE数据集构建步骤
3. 示例:场景主客观行驶风险分析
4. 示例:驾驶员眼动特征分析
5. 总结与展望
1、背景
作为智能驾驶的「大脑」,决策规划系统应当采取与人类认知相协调的算法,以提高人类驾驶员对智能驾驶的接受度。为此,机器学习算法在训练、测试过程需要引入大量高质量的人类认知数据。然而,现有自然驾驶数据集(例如Waymo、HighD等)主要聚焦于传感器或车辆运动轨迹数据,缺少与人类认知相关的信息。这限制了算法模型实现与人类驾驶员认知相协调的决策。
1.1 研究综述
相关研究通过开展实验,采集驾驶员/乘客的主观风险认知及生理数据等,构建包含人类认知信息在内的驾驶数据集,如表1所示。
表1 人类认知信息采集方法
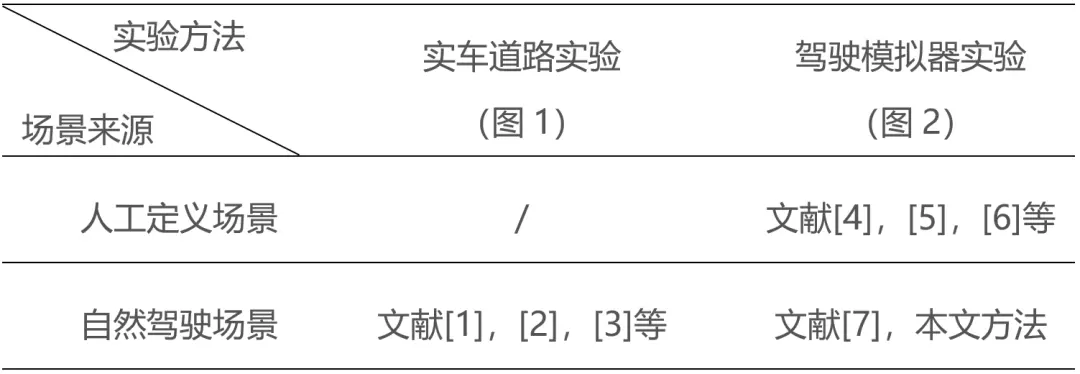
 图1 实车道路实验场景[1]
图1 实车道路实验场景[1]
图2 驾驶模拟器实验场景[4]实验方法介绍及对比:
实车道路实验[1]:在开放道路环境中,采集乘客的生理及主观风险认知等数据。该方法的情景真实感(车辆内外环境的保真度)较好,能确保乘客产生更加准确、自然的风险认知。驾驶模拟器实验[4]:在仿真场景中,通过驾驶模拟器采集驾驶员的驾驶行为、生理及主观风险认知等数据。该方法的数据采集成本低,可以通过在危险仿真场景下实验,大量采集高价值的安全关键场景数据。
- 下一篇:多传感器注入HIL仿真系统用户案例
- 上一篇:斯堪尼亚探索增程式混动卡车应用前景



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
