




 广告
广告





















































风洞内传声器阵列互谱矩阵的去噪

在风洞中使用传声器阵列进行波束形成测量时,传声器信号会被气流噪声严重干扰。考虑稳态运行工况,传统的频域波束形成方法会对互谱矩阵(CSM)进行长时间的平均,假定传声器之间的气流噪声是不相关的,气流噪声与真实噪声源信号也是不相关的,这样气流噪声的贡献会逐渐地集中在CSM主对角线上。
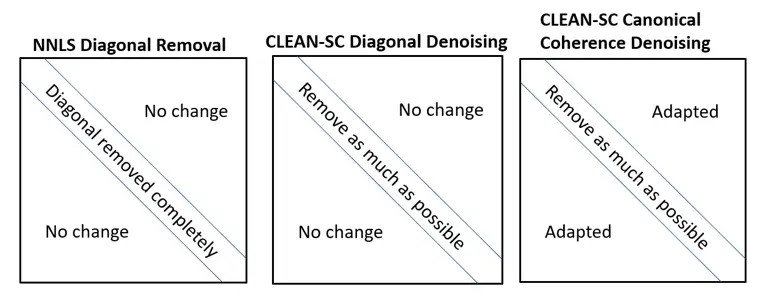
目前广泛使用的方法是主对角线移除(Diagonal Removal, DR),即避免使用CSM主对角线,这对于一些波束形成算法是有效的,但其缺点是会低估声源幅值,在声源云图上产生负的声功率。反卷积波束形成如NNLS可以使用DR去噪,CLEAN-SC也包含了DR过程,它对强声源有很好地识别能力,但对弱声源就无法收敛。
对于其他波束形成算法,如函数波束形成,以及与声全息相关的算法,CSM主对角线是必需的。为此,本文介绍两种新方法,即主对角线去噪(DiagonalDenoising, DD)和典型相干去噪(CanonicalCoherence Denoising, CCD)。
DD从主对角线上最大可能地减去功率和,同时保持所有非主对角线不变并且矩阵是半正定的。当主对角线以外的噪声贡献都被平均掉,且不相干声源的数目不超过 ,M是传声器数目,DD能够准确地从主对角线移除不相关噪声。在计算时,我们使用凸优化方法,计算速度快且保证收敛。
,M是传声器数目,DD能够准确地从主对角线移除不相关噪声。在计算时,我们使用凸优化方法,计算速度快且保证收敛。
CCD将阵列传声器平均分为两组,从两个组中提取出具有最大互相干性的信号子空间,这样非相关气流噪声和扰动信号就会被有效去除。CCD使用一个迭代提取算法,每次迭代都会重新分组,计算速度快,且适当调整非主对角线元素以克服DD方法的一些缺陷。CCD方法比DD方法能够更好地去除CSM主对角线噪声,并且CCD能够自动调整参数,无需用户自己设置参数。
测试案例
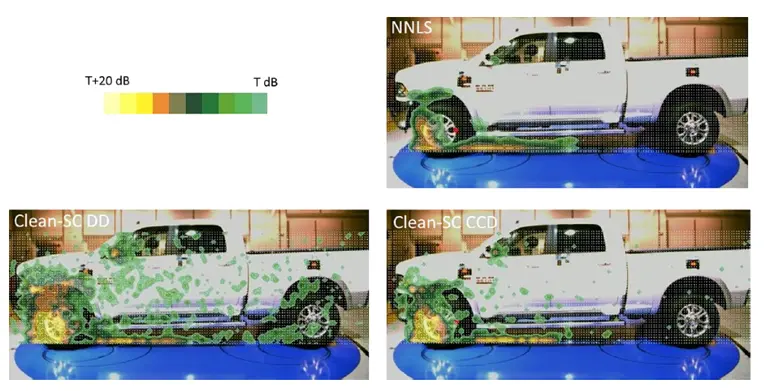
使用108通道半轮形阵列,风洞内风速为140km/h。下图是5-6kHz气动噪声源的声强分布图,NNLS+DR能够有效抑制噪声,但是会低估声源并且移除微弱声源,例如外后视镜和前灯的后边缘的噪声源几乎消失了,虽然这些声源很微弱,但是非常重要。CLEAN-SC+CCD能够去除绝大部分的噪声,且保留了几乎所有的重要噪声源。
更多信息详见Jørgen Hald; Denoising ofcross-spectral matrices using canonical coherence. J. Acoust. Soc.Am. 1 July 2019; 146 (1): 399–408. https://doi.org/10.1121/1.5116010.
总结
HBK拥有近40年的阵列声学测试经验,风洞内使用CLEAN-SC+CCD方法能够有效抑制气流噪声的影响,快速、高精度识别噪声源,实现超大动态范围的成像。
结合车内球面波束形成,HBK独有的FAS+CLEAN-SC,boost LF resolution算法能够极大提高空间分辨率,显著降低旁瓣水平,在风洞内同时实现车内360°精准的声源定位。
利用参考贡献成像方法,即CLEAN-SC withReference Contribution,能够将气动噪声源与车内驾驶员耳旁参考点相关联,进一步得到对车内参考点有贡献的车外气动声源分布,这对车内噪声优化更有意义。



 广告
广告 



最新资讯
-
智能底盘如何重构极限驾驶边界:定义与性能
2026-03-24 17:01
-
选择合适的扭矩传感器 - 实现更高性能选型
2026-03-24 13:02
-
东扬精测参展第七届宁德国际新能源电池技术
2026-03-24 10:52
-
东扬精测参展重庆国际显示技术展览会(ICDT
2026-03-24 10:51
-
国内首个“路空一体”国家级测试基地!南方
2026-03-23 17:23
