




 广告
广告





















































车辆架构的变化对雷达系统的挑战

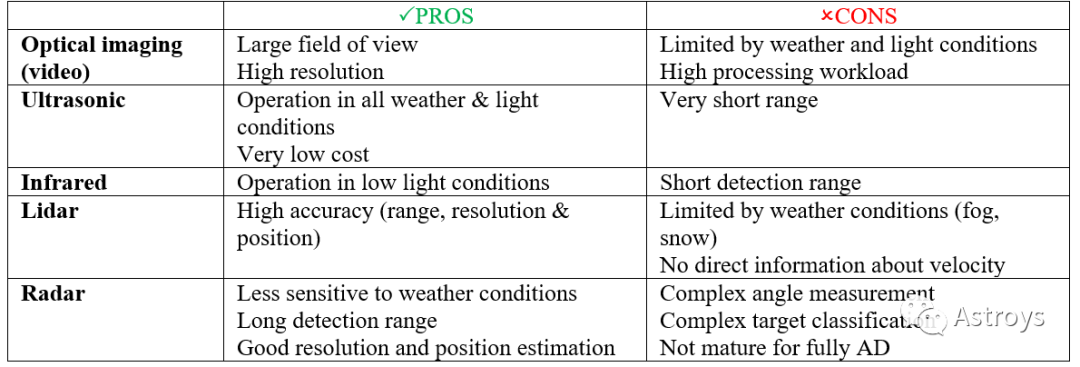
在ADAS和自动驾驶的传感器中,雷达已被证明是非常可靠的ADAS应用,如ACC。雷达的应用有望在未来扩大,因为雷达经常与其他传感技术一起使用,如摄像头和LiDAR。下表总结了不同类型传感器的优缺点。
完全自动驾驶需要融合从不同的传感技术获得的数据。随着传感器分布在汽车周围,它将有可能提供360度全覆盖,在汽车周围形成一个安全“茧”。
雷达可以很容易地安装在车辆常见部件的后面,如保险杠或车辆logo,这样就不会影响美观。76-81GHz频段已被大多数国家接受为汽车雷达的频段。由于雷达天线的尺寸变得很小,物理集成高频率的工作变得更加容易。然而,由于功率的权衡、更高的损耗和更高制造公差的影响,当频率上升时,新的挑战出现了。
雷达也特别适合车辆的应用,因为车辆是雷达波的良好反射器。它既可以用于舒适功能,如ACC,也可以用于高分辨率的传感应用,这增加了车辆的被动和主动安全性能。例如盲点检测、变道辅助、后方交通警报以及检测车辆附近的行人和自行车。
目前,雷达基本上根据其探测范围进行分类:
-
近距雷达:探测距离可达50米,视野宽,分辨率高
-
中距雷达:探测距离可达100米,视野中等
-
远距雷达:250米或更远的距离,视野更窄,分辨率更低
随着新技术的发展,探测范围有望超越这些限制,同时增加垂直的探测维度,以提供周围环境的完整3D图像。
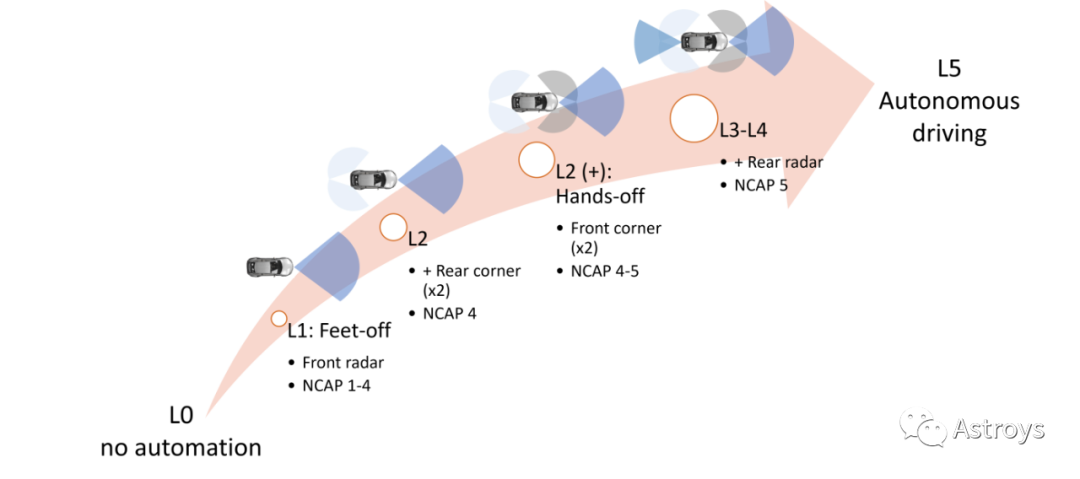
未来,车辆将有望增加多个雷达模块,从基本的前向雷达配置(提供基本的L1功能)升级到更高级别。很快,更多的车辆将配备角雷达,以达到L2+功能和NCAP 4-5级,以及更高级别的L3-4和NCAP 5级。
然而,雷达数据的处理方式将很大程度上取决于车辆架构。当前中央计算单元性能提高的趋势也推动了车载E/E架构由向分布式架构的转变。
尽管向完全分布式架构的迁移要到2030才能完成,但部分实现将更早出现在市场上。首先,一些域控制器将用于特定功能。
此外,域控制器的数量将增加,而zonal控制器也将在完全集中的E/E架构建立之前引入,其中车辆的中央计算机将通过zonal ECU连接到传感器。这种发展还需要提高车辆网络的容量和可靠性,以及软件的复杂性。这可能会带来巨大的挑战,包括额外的连接,可能需要更昂贵的线束来满足不断增长的数据速率需求。
随着新的E/E架构的引入,部分雷达处理可以从雷达模块(边缘计算)卸载到zonal或中央ECU,从而实现更高效的计算。今天,完整的雷达处理是在边缘上进行的,使用“智能传感器”。
这意味着许多独立的雷达模块分布在车辆周围,每个模块都有自己的雷达收发和处理能力。处理后的数据,通常是对象列表,被传输到ADAS ECU进行进一步处理,并可能与来自其他传感器的数据融合。通过在车内适当分布传感器,可以正确感知车辆的环境,识别障碍物。
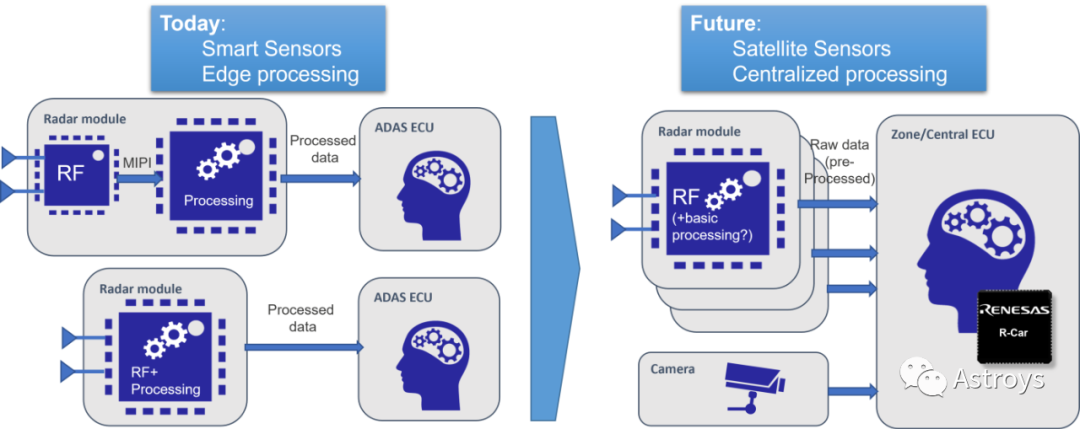
随着集中式计算架构的发展,一些雷达模块的数据处理可能会从雷达转移到远程处理单元,由zonal ECU或中央计算机直接处理。雷达模块本身就不那么“智能”,只对接收到的雷达信号进行有限的处理。
例如,该模块将确定与不同物体的距离,并向远程处理器提供距离配置文件。然后,它将接收来自不同卫星雷达模块的预处理数据,并对每组数据执行剩余的处理步骤,生成具有各自特征(距离、方向和速度)的目标列表,并创建周围环境的完整图像。得到的结果将被融合在一起或与其他传感器的结果相结合。
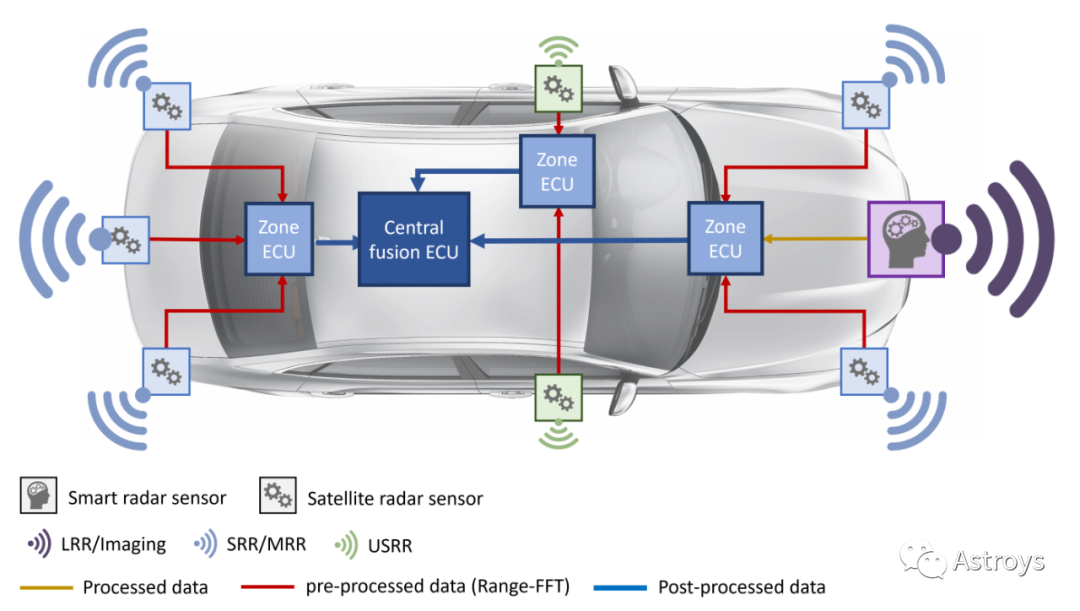
在这种集中式架构的最初实现中,来自不同雷达的预处理数据可以通过以太网骨干网传输到zonal或中央ECU。当需要更高清晰度且数据量过大时,如前视或成像雷达,雷达处理仍可能在传感器本身上进行,以减少要传输的数据量。
远距雷达数据的集中处理提供了很多优势。首先,雷达模块本身变得不那么复杂,从而节省尺寸和成本,减少散热问题。硬件和软件的修复和升级都会变得更加容易。
其次,利用汽车现有的网络,即以太网骨干网,也降低了布线的成本和重量。此外,通过以太网传输的数据将以一种更易存储和处理的格式提供。
最后,车辆控制单元的数据处理为更高的效率和更复杂的操作打开了大门。通过实现与其他传感技术(摄像头和LiDAR)的数据融合,可以增强传感能力。可以考虑将机器学习和AI用于高级检测和预测,从而实现更高水平的自动驾驶。
边缘处理和集中式计算预计将共存数年。迁移到集中式计算架构将需要访问整个车辆的高速链路,这可能导致使用不同的标准进行数据交换。除了成本和布局复杂性之外,关于数据传输使用哪种标准还没有明确的定论。虽然目前CAN和以太网占主导地位,但一些制造商正在推动MIPI A-PHY等替代方案。
在任何情况下,必须采取额外的安全措施来保证传输数据的完整性和安全性。例如,通过以太网链路传输数据需要额外的处理和内存,因为可能需要媒体访问控制安全(MACsec)和硬件安全模块。
另外,随着雷达模块的数量不断增加,它们都在发射和接收无线电波,也可能导致干扰问题。干扰会降低雷达系统的探测性能,从而降低ADAS和自动驾驶系统的功能性和安全性。目前行业正在分析几种缓解策略,可分为三组:避障、检测和修复,以及基于合作和沟通的缓解。
雷达已成为ADAS和自动驾驶应用的关键传感器。成像雷达系统由需要收发器覆盖整个汽车雷达频段的模块组成;支持短、中、远程雷达应用;满足集中处理的需求。ECU也是ADAS和自动驾驶解决方案的重要组成部分,这些解决方案需要先进的SoC,支持集中处理,并支持高速图像识别和处理来自摄像头、雷达和LiDAR的周围物体。
[参考文章]Vehicle architectures challenges radar systems — Marta Martínez-Vásquez
- 下一篇:直播丨车联网路测融合感知
- 上一篇:综述-图强化学习在混合自动化交通中的协同决策应用



 广告
广告 



最新资讯
-
《汽车车外流场 流动显示风洞试验方法》国
2026-03-06 11:33
-
蔚来电池研发基地落户上海!
2026-03-06 11:32
-
你的电源“免疫力”够强吗?芯片稳定运行的
2026-03-06 10:07
-
更智能、更高效 | ZEISS T-SCAN hawk 2 全
2026-03-06 09:43
-
思看科技发布SIMSCAN-S Gen2高精度掌上三维
2026-03-05 16:55
