




 广告
广告





















































某纯电动车低速制动工况的减速器异响分析与控制策略优化

-
来源:《机械传动》2022年 第46卷 第5期
-
作者:张军、黄文兵、窦国伟、鲍勇仲
-
吉利汽车研究院(宁波)有限公司
由于电驱传动系统的“欠阻尼”动力学特性,在某些特定的瞬态过渡工况,纯电动车容易发生传动系统的冲击噪声或整车抖动问题,严重地降低了车辆的驾驶舒适性。
以某前置前驱纯电动车的低速制动工况异响问题为案例,系统地阐述了电驱传动系统异常噪声的测试分析与排查过程,提出了潜在的电驱系统异响机理与控制策略方法;并在不改变传动系统硬件结构的条件下,通过电机转矩过零滤波策略和主动阻尼控制的改进优化,消除了该车型在减速制动过程的异响问题。
实车测试验证了改进方案的有效性。这对于解决类似的电驱动系统瞬态振动噪声问题,具有较重要的工程参考价值。
与传统燃油车相比,纯电动车传动系统的各零部件都采用了“硬连接”形式,没有扭转减振器、离合器、柔性联轴器或液力变矩器等传动减振器件。而且,驱动电机调速与转矩输出特性与燃油发动机差别很大,其动力响应更快,传动换向更频繁快速,转矩输出的变化率也更大。因此,纯电动车在快速起步、Tip in/out、能量回收切换等工况,容易发生传动系统异响或整车抖动问题,严重地影响驾驶的舒适性。
刘成强等研究了某小型纯电动车的驱动电机电磁转矩控制参数,以及轮胎刚度对整车振动的影响;Ravuhandran M 等设计了一种开关模式控制系统,以解决传动间隙引起的电动汽车行驶耸动问题;于蓬等通过前/后馈主动控制算法的设计,同时对悬置结构进行优化,改善了某搭载集成驱动式纯电动车的起步抖动问题;刘宁等根据同步电机系统对周期性扰动力矩的衰减程度,对转速环的比例增益进行补偿。赵治国等研究了纯电动车Tip in/out工况的前馈校正与主动阻尼防抖控制问题;Galvagno E 等提出了以传动系统壳体振动特征评估整车换挡过程周期性冲击噪声的严重度。但国内外学者对纯电动车低速制动过程瞬态噪声问题的研究还较少,缺少系统性的工程解决方法。
本文中以某纯电动车低速制动过程的异响问题为案例,介绍了测试分析与问题排查的过程,提出了潜在的敲击噪声机理与控制策略方法;在不改变传动系统硬件结构的条件下,实车验证了控制策略优化改进措施的有效性,解决了该车型的减速异响问题。这对于解决类似的电驱动系统瞬态振动噪声问题,具有较重要的工程参考价值。
1 问题描述
某前置前驱纯电动轿车搭载了“三合一”集成式电驱动总成,在15 km/h以下匀速行驶工况下,在中度或轻度制动的静止过程中,驾乘人员能够明显地感知到前机舱内存在“咔咔”的异响声,但没有车辆的抖动或耸动情况发生。
由于纯电动车低速行驶的车内背景噪声较小,没有路噪和风噪等背景噪声的掩盖效应。因此,这种连续性的瞬态冲击声就很容易被感知察觉,降低了车辆驾乘的舒适性,会引起市场用户的抱怨。通常,对于这种瞬态过程的整车异响问题,其影响因素较多,问题分析与排查的过程也较复杂。
1.1 整车的测试方案
经主观评价,可以大致判断异响发生在前机舱内,但是具体异响发生位置很难通过主观识别。所以,为了进一步明确异响的工况特征,排查异响与电驱动总成的关联性,在电驱总成底部的减速器壳体表面上布置了一个三向加速度振动传感器,如图 1 所 示;同时,在车内驾驶员位置布置了麦克风,通过CAN总线采集电机转速和输出转矩等信息。
测试方法为:车辆在平直光滑路面上缓慢加速到10 km/h左右,快速松开加速踏板,轻/中度制动到车辆停止,多次循环重复操作,同步测试与采集各通道的信号。
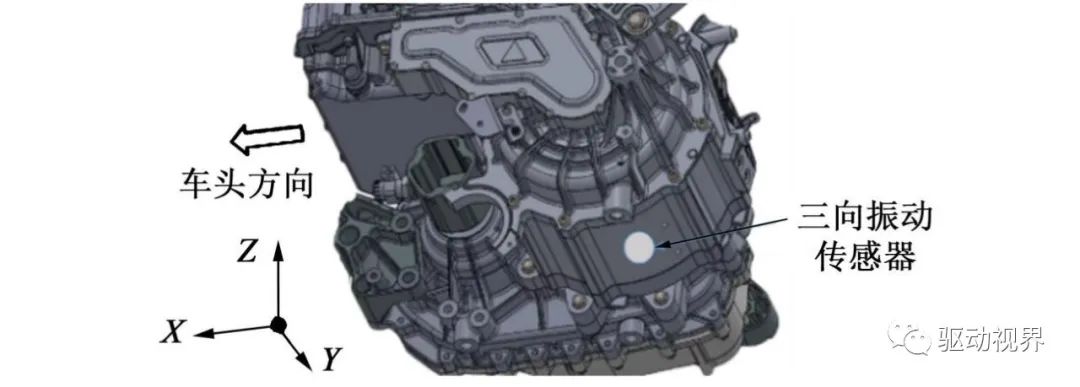
图1 电驱底部振动传感器测点布置及整车坐标系
1. 2 整车测试结果的分析
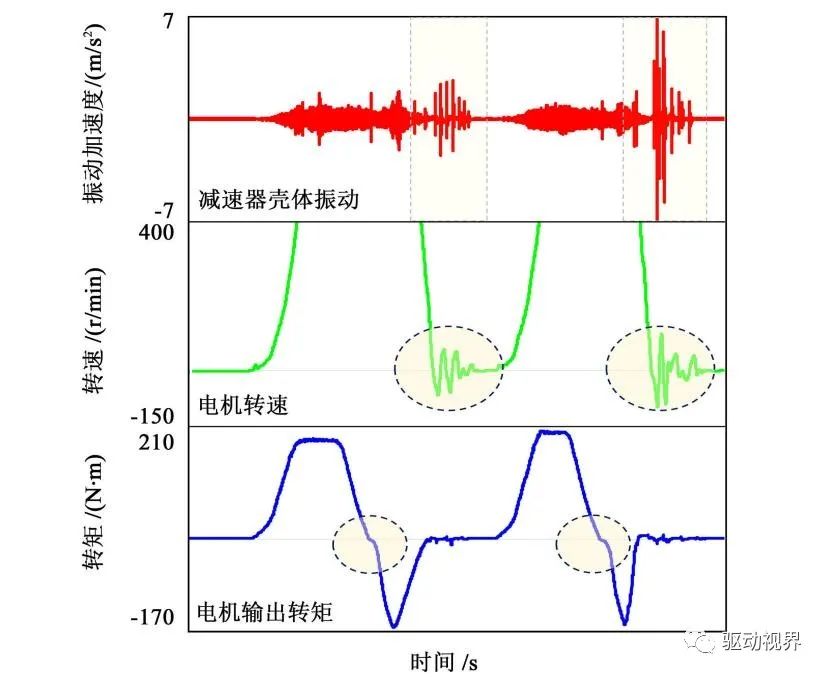
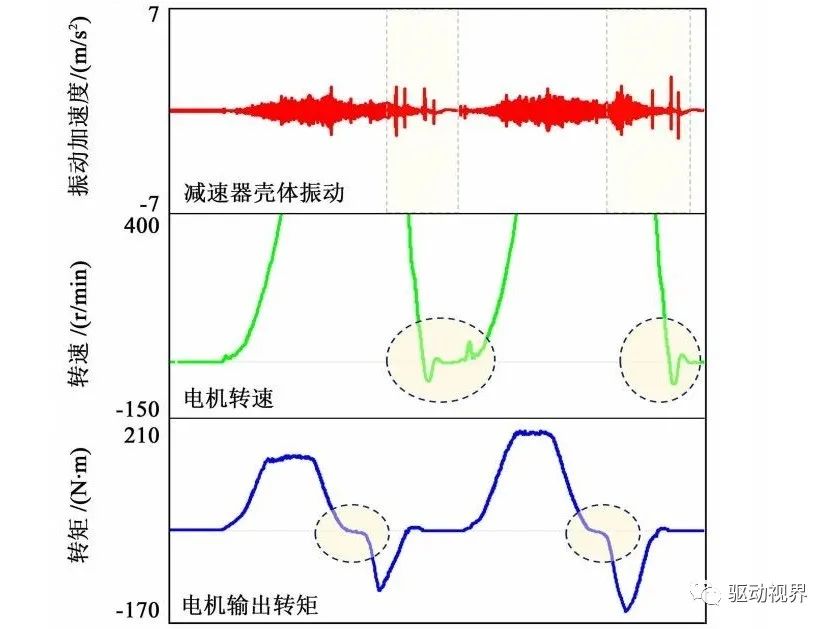
图 2 所示为车内噪声与电驱壳体振动的时域特征测试结果对比分析,从中可以得知:
① 异响发生在车辆减速到静止阶段,如图 2 中标黄所示,制动能量回收逐渐减小,当电机输出转矩为 0 时,电机转速在零点位置出现 100 r/min 以内的波动;在持续时间 1. 3 s 左右范围内,减速器壳体表面的振动加速度出现了 6~10 次的瞬时冲击特征。
② 经振动数据的时域音频回放主观辨识,减速器振动与车内噪声具有强关联性,而且,振动冲击特征比车内声压更显著地表征出机舱的异响问题。
③ 与第一次测试相比,第二次测试过程的电机转速波动幅值更大,电驱壳体振动的冲击特征更显著,机舱异响的主观感知更明显。
④ 电驱总成壳体振动的瞬时冲击特征在 Z 向最为显著,而在轴向(Y 向)只是轻微存在瞬态冲击峰值,这说明电驱总成轴向窜动引起异响问题的可能性较低。
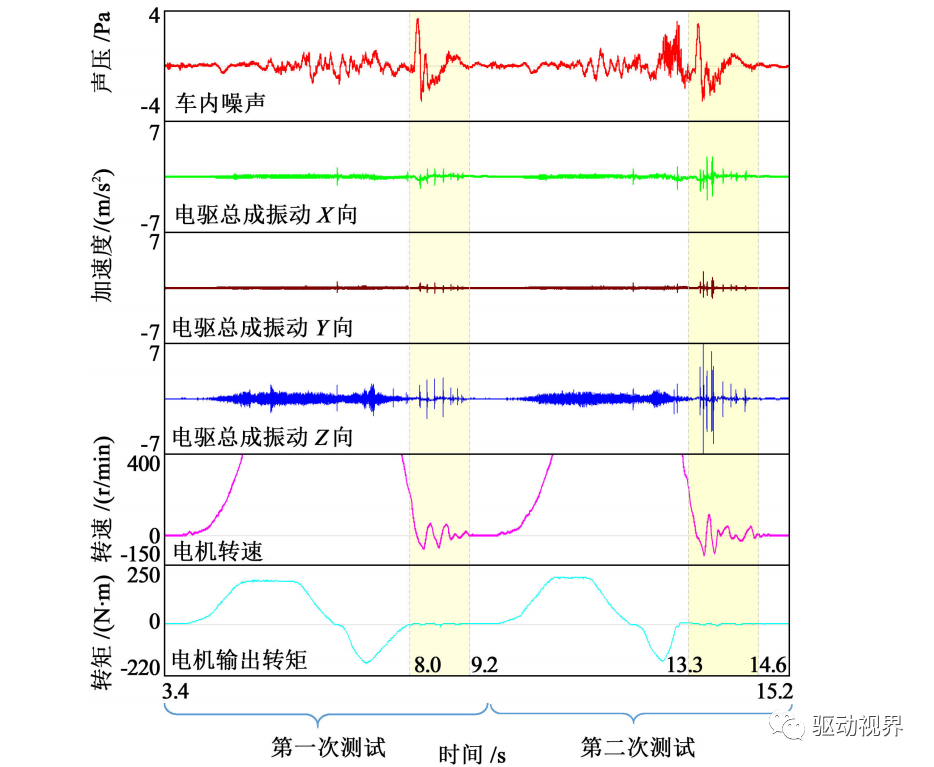
图2 车内噪声与电驱壳体振动的时域特征测试分析
截取图 2 中第一次测试过程异响发生的时域范围,如图 3所示,进行小尺度的测试数据分析对比。
从中可以得知:
① 在电机振荡转速上升或下降的各个半波长区间,减速器壳体振动均出现 1~2 次的冲击峰值特征。
② 当转速波动逐渐减小时,振动峰值随之降低,直至消失。
③ 根据各转速周期振荡的时间间隔,可初步估计振荡频率为 3. 1~4. 7 Hz,这接近于整车传动系统的1阶扭转模态频率。
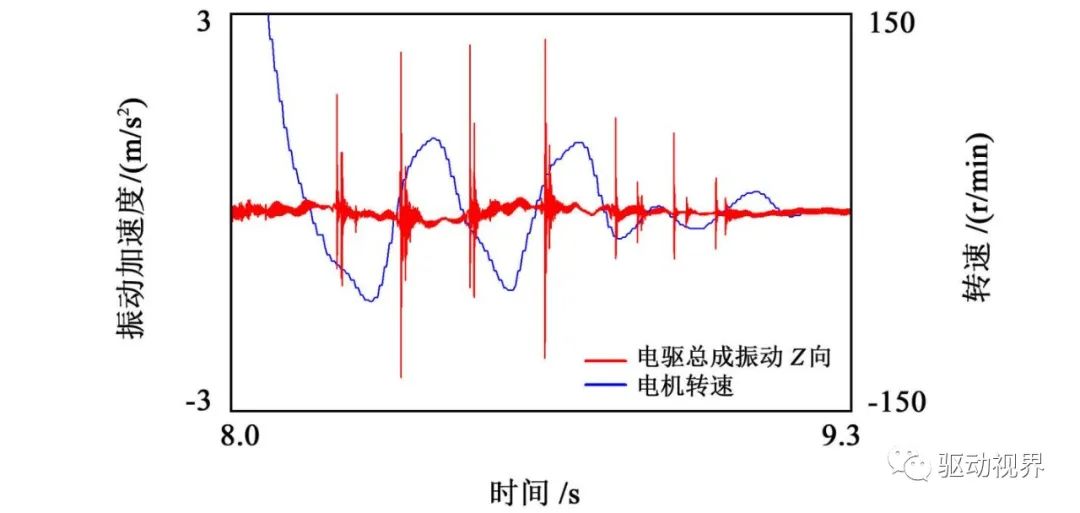
图3 电驱壳体振动与电机转速的时域波形对比
从以上测试分析结果推测,该异响与电机转速的波动密切相关。其潜在原因是:在车辆静止过程中,电机转子在惯性载荷作用下,在零点位置出现转速振荡现象;由于传动侧隙的客观存在,从而引起电驱总成传动系统内部多次的撞击或敲击。
为了更准确地识别电驱动系统的异响位置,借助便携式多通道电子听音设备,在整车半消声室转毂实验室内开展了更细致的现场诊断。车辆在低速制动工况下,悬置系统没有发生过度的翻转和限位撞击现象;对前机舱内电驱总成传动系统各个位置的主观监听评价对比,减速器壳体的异响特征最为明显,电机侧端盖、左/右驱动半轴的内外球笼以及制动卡钳位置都只存在轻微异响。因此,结合图2和 图3所示的测试分析结果,进一步推断该异响问题发生在减速器内部。
2 电驱传动系统异响潜在机理及控制措施
如图4所示,该纯电动车电驱传动系统采用的是单级机械减速器,速比大、转速高,需考虑润滑冷却、热变形和磨损等因素。因此,必须保证合理的齿轮侧隙,以避免引起机械传动系统的回滞非线性特征。否则,根据电驱传动系统的“欠阻尼”动力学特性,在电机转矩正/负切换的过零过程,或者在电机转速波动较大的情况下,很容易引起电驱传动系统的噪声振动问题。
对于这种电驱传动间隙引起的瞬态工况异响问题,工程上的解决思路有两种:一种是尽量减小传动系统部件的间隙,或者通过优化传动系统结构的动态特性,减小瞬态冲击过程的能量,比如减小各个传动连接部件的间隙,优化传动部件惯量和扭转刚度,减小轴向窜动的限位量或者增加传动系统的拖滞阻尼等。另一种是采用更精准的转矩和转速控制策略方法,消除或减小传动系统的瞬态激励能量水平。
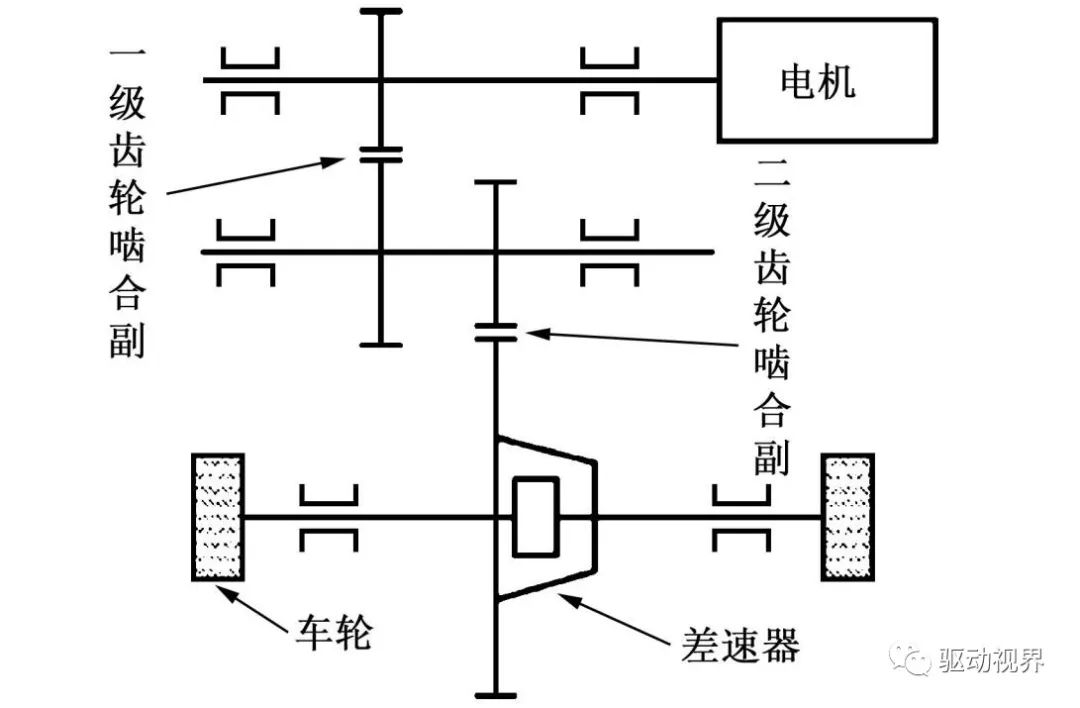
图4 电驱传动系统的结构示意图
2. 1 传动系统间隙与齿轮敲击模式
如图5所示,为了分析电驱动系统齿轮间隙在啮合过程的作用,通常采用齿侧非线性分段函数F (x_ij )表示齿轮动态啮合力,以研究不同啮合接触状态下的齿轮敲击模式。其中,x_ij 为齿轮副之间的实时传动间隙;b为齿轮的总体齿侧间隙。
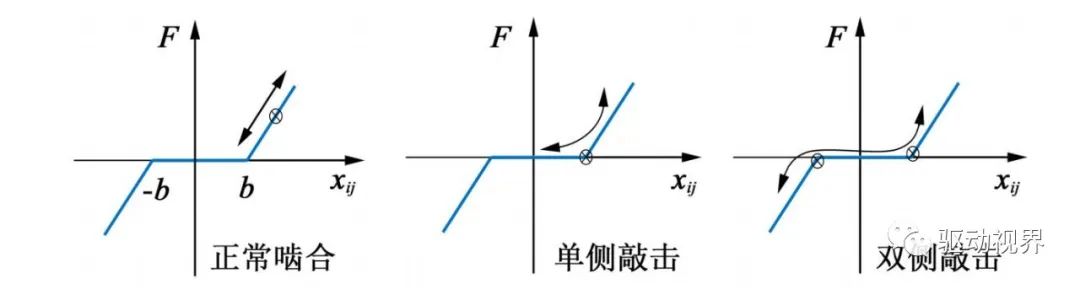
图5 齿轮啮合情况与敲击现象的示意图
降低齿侧间隙,减小传递误差,可以提升转矩传递的稳定性,减小传动转矩或转速波动下的齿轮敲击噪声问题,但电驱动总成减速箱的齿轮制造加工与安装精度要求则急剧增加,并需要重新进行耐久可靠性的开发验证。而采用适度提高电机或减速箱的冷却润滑介质黏度,增加齿轮拖曳力矩,优化齿轮惯量与扭转刚度等方法,也能改善电驱动系统的敲击噪声问题。
2. 2 电机转速波动的主动控制策略分析
纯电动车减速过程中,在电机转矩正/负换向的“过零”阶段,为了避免传动间隙之间的冲击噪声问题,通常采用转矩低通滤波、限制转矩变化率和适度增加过零时间等措施的前馈开环式整车转矩控制方法,如图 6 所示。但这会降低整车的动力响应速度,降低行驶平顺性,导致动力迟滞感。
而对于电机转速波动引起的电驱传动系统振动噪声问题,目前广泛采用主动阻尼的闭环控制策略,利用电机的快速转矩响应特性,把电机作为主动控制系统的执行器,将主动阻尼控制算法直接集成到控制器中,模拟电驱传动系统对动力源转矩的阻尼衰减作用,主动补偿与电机转速波动反相位的转矩变化,从而抑制转速波动。典型的实时主动阻尼控制逻辑架构如图7所示。
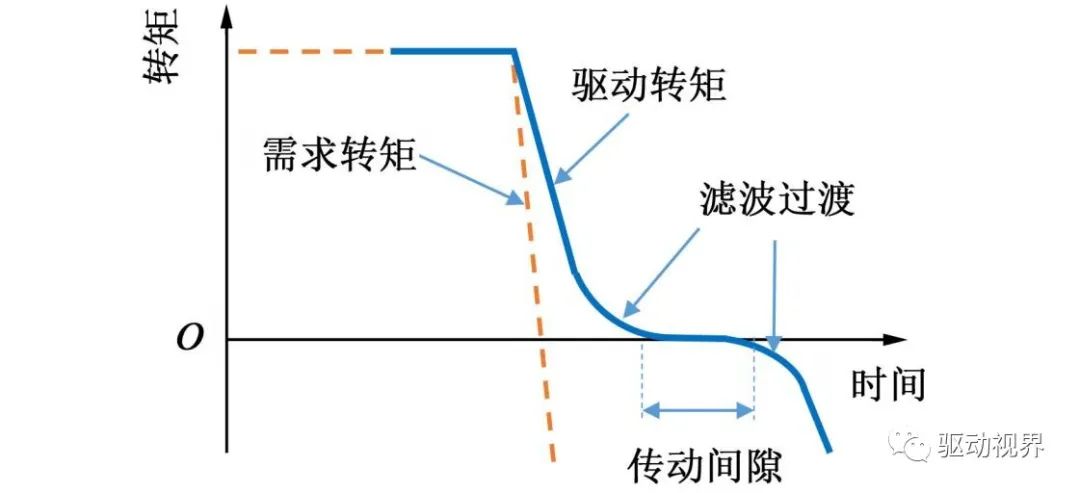
图6 减速过程的电机“转矩过零”滤波前馈策略示意图
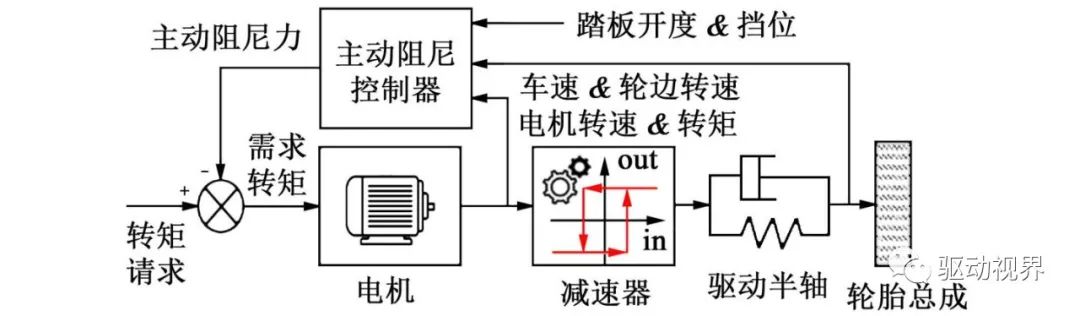
图7 实时闭环的主动阻尼控制策略逻辑架构示意图
然而,在纯电动车低速轻载荷的行驶工况下,由于整车驱动负荷的瞬时模糊性(比如,路面坡度和制动需求的不确定性),电机低转速的电流畸变和电驱动系统动力耦合的复杂性,客观存在的传动间隙滞回特征,以及轮边转速与电机转速信号通道的不稳定性等参数扰动因素,将可能导致闭环主动阻尼控制方法无法精准补偿电机转速的波动,反而会造成转速震荡的加剧,导致电驱传动系统的敲击噪声问题,甚至引起整车的抖动。
3 标定优化与验证
根据以上对低速制动过程异响问题潜在机理的分析,考虑到车型开发的工程可行性要求,本文中主要从电驱动控制策略的标定方面,进行了系统优化与实车验证。基于不显著影响车辆驾驶性的前提,实际应用的工程措施方案为:
(1) 在低速制动的“转矩过零”过渡工况,触发前馈转矩滤波控制逻辑,适度增加靠齿时间,降低电机转矩的变化梯度,减缓转矩变向对传动系统的惯性冲击。
(2)“转矩过零”和电机转速接近为零的阶段,即在传动系统异响容易发生的工况,退出主动阻尼策略的控制介入,利用传动结构的自身阻尼特性抑制转速震荡现象,增加电驱动控制系统的鲁棒性;退出条件设置为:前/后两帧转速信号的乘积为负,并且电机需求转矩绝对值小于2. 2 N∙m。
(3) 在 前 馈 转 矩 滤 波 功 能 的 作 用 时 间 大 于500 ms,或者需求转矩大于2. 5 N∙m时,退出“转矩过零”前馈控制作用,重新使其能主动阻尼控制,提升动力响应速度;同时,减小快速上升的转矩对电驱传动系统的冲击激励,避免潜在的整车抖动问题。以上措施涉及的具体参数数值,需要根据各车型的电驱动系统特性和实车问题进行适应性标定设置。
经对标定优化后车辆的主观综合驾评与测试对比分析,车辆驾驶平顺性与动力响应性并没有明显下降,主观评价已感知不到传动系统的敲击异响。图8所示为标定优化前后的测试对比分析,在车辆减速到静止的过程中,由于电机转速振荡波动特征明显地改善,减速器壳体的瞬态冲击振动峰值显著降低,振动冲击次数也明显减少。
(a) 标定策略优化前
(b) 标定策略优化后
图8 纯电动汽车低速制动工况异响的标定优化对比
4 结语
电驱传动系统是纯电动车中的重要组成部分,由于电机转矩输出与减速器结构设计的特点,常会出现整车行驶载荷瞬时交变工况的敲击噪声抖动问题,会严重地降低驾乘舒适性。
以某前置前驱纯电动车的低速制动工况异响问题为案例,系统性地阐述了电驱传动系统敲击噪声的测试分析与排查过程,提出了潜在的电驱系统异响机理与控制策略方法。并且,通过电机转矩过零滤波策略和主动阻尼控制的改进优化,解决了该车型的减速制动异响问题,实车测试验证了改进方案的有效性,这对于解决类似的电驱动系统瞬态振动噪声问题,具有较重要的工程参考价值。
参 考 文 献
[1] 刘成强,徐海港,柴本本,等.纯电动汽车传动系统扭转振动特性分析[J].机械设计与制造,2018,334(12):223-226.
LIU Chengqiang,XU Haigang,CHAI Benben,et al.Analysis on torsional vibration responses of transmission for electric vehicles ma⁃chinery[J]. Mechinery Design & Manufacture,2018,334(12):223-226.
[2] RAVICHANDRAN M,DOERING J,JOHRI R,et al. Design and evaluation of EV drivetrain clunk and shuffle management control system[C].2020 American Control Conference(ACC),2020:4905-4912.
[3] 于蓬,章桐,孙玲,等.集中驱动式纯电动车动力传动系统扭转振动研究[J].振动与冲击,2015,34(10):121-127.YU Peng,ZHANG Tong,SUN Ling,et al.Surge analysis and activepassive control for a central driven pure electric vehicle[J].Journal of Vibration and Shock,2015,34(10):121-127.
[4] 刘宁,夏长亮,周湛清,等.基于比例增益补偿的永磁同步电机转速平滑控制[J].电工技术学报,2018,33(17):4007-4015.LIU Ning,XIA Changliang,ZHOU Zhanqing,et al. Smooth speed control for permanent magnet synchronous motor using proportional gain compensation[J].Transactions of China Electrotechnical Society,2018,33(17):4007-4015.
[5] 赵治国,王晨,张彤,等 .纯电动 Tip In/Out 工况的前馈校正与主动阻尼防抖控制[J].汽车工程,2018,40(1):19-27.ZHAO Zhiguo,WANG Chen,ZHANG Tong,et al.Anti-shake control with feed-forward correction and active damping control in TipIn/Out phases of pure electric driving[J].Automotive Engineering,2018,40(1):19-27.
[6] GALVAGNO E,DIMAURO L,MARI G,et al.Dual clutch transmission vibrations during gear shift:a simulation-based approach for clunking noise assessment[C].SAE Noise and Vibration Conference & Exhibition,SAE Technical Paper,2019-01-1553.
[7] MORADI H,SALARIEH H. Analysis of nonlinear oscillations in spur gear pairs with approximated modelling of backlash nonlinearity[J].Mechanism and Machine Theory,2012,51:14-31.
[8] 李英明,陈卫东,陈奇,等.齿侧间隙对齿轮副非线性振动特性的影响研究[J].机械传动,2013,37(5):1-5.LI Yingming,CHEN Weidong,CHEN Qi,et al.Research of the influence of gear backlash on gear pair nonlinear vibration characteristic[J].Journal of Mechanical Transmission,2013,37(5):1-5.
[9] KAWAMURA H,ITO K,KARIKOMI T,et al.Highly-responsive acceleration control for the nissan LEAF electric vehicle[C]. SAE 2011 World Congress and Exhibition,2011-01-0397.
[10] PARK J W,KOO D H,KIM J M,et al.Improvement of control characteristics of interior permanent-magnet synchronous motor for electrical vehicle[J].IEEE Transactions on Industry Application,2001,37(6):1754-1760.
[11] BANG J S,KO Y K,JUNG T H.The active damping control to reduce driveline oscillations for electric vehicles using wheel speeds[C].SAE Technical Papers,2015-01-1113.
[12] KOU Y S,WESLAT1 F.Development of a hybrid powertrain activedamping control system via sliding mode control scheme[C]. SAETechnical Papers,2013-01-0486.
[13] AMANN N,BOCKER J,PRENNER F.Active damping of drive train oscillations for an electrically driven vehicle[J].IEEE/ASME Transactions on Mechatronics,2004,9(4):697-700.



 广告
广告 



最新资讯
-
市场监管总局:去年召回684万辆汽车,通过
2026-03-20 13:46
-
联合国法规R80对大型客车座椅及固定点强度
2026-03-20 12:18
-
千亩级基地开跑!比亚迪“5分钟充电”电池
2026-03-19 17:18
-
安全调试不踩坑!Workbench安全功能配置,
2026-03-19 17:10
-
联合国法规R89对车辆速度限制装置的工程化
2026-03-19 12:21
