




 广告
广告





















































多主车智能驾驶的硬件在环仿真

内容提要:通常业内所说的硬件在环仿真都是对单主车进行HIL仿真,即仿真场景中的车辆只有一个是通过控制器进行控制,其余车辆都是按照预先设定好的运动轨迹进行运动的幽灵车;而多主车验证方案可以接入多个域控制器,模拟多辆真实智能驾驶车在设定的场景下运动甚至互动博弈。
一、智能驾驶测试验证
智能驾驶测试验证是整个智能驾驶开发过程中的重要环节,也是智能驾驶技术发展的重要支撑,随着智能网联汽车高等级自动化和网联化系统不断产业化落地,对测试的依赖越来越深入,尤其是面对即将量产落地的L3级以上智能驾驶产品,对现有的测试技术、标准和法规,都提出了新的挑战,需要新的技术突破。智能驾驶汽车本身结合了车辆技术、人工智能、模式识别、5G通讯、传感器融合等多领域、跨学科知识,跟传统的汽车测试有很大不相同,为了应对千变万化的交通场景,需要海量的数据对智能驾驶算法进行训练,通过不断的迭代,才能覆盖尽可能多的场景。并且测试会贯穿车辆的生命周期,即使车辆已经卖出并上路行驶,也需要定期远程OTA升级,以覆盖新的场景。智能驾驶开发过程中的测试验证伴随着车辆开发的整个流程,主要包括对标测试、单元测试、软件在环(简称SIL)、硬件在环(简称HIL)、车辆在环(简称VIL)、封闭场地测试、开放道路测试等,当然也包括智能驾驶行业特有的感知算法开环测试验证,后者主要分两类,即仿真注入与道路数据回灌。可以说是涵盖了从智能驾驶单个模块到系统再到整车的全链条验证。
二、HIL测试本文将重点介绍的是智能驾驶HIL测试,即利用仿真软件、实时机和硬件IO接口,对接到真实的域控制器,在实时环境下进行操作系统、算法及应用功能的测试。在此需要强调的是,HIL测试最为重要的是整个测试系统的实时性与同步性,否则搭建的环境不足以支撑对于功能的验证,系统步长及实时性得不到保证,域控制器的输入信号与真实的实车环境就会存在较大的误差(也可以称之为错误)。目前国汽智控使用的硬件在环测试系统是dSPACE设备,该设备的系统实时性及同步性公认业内最佳。

图1 HIL机柜实物图
dSPACE HIL测试采用的是ASM模型,即基于MATLAB Simulink搭建的整车仿真模型,实现对智能驾驶操作系统加上层应用软件的闭环测试验证。可以利用Simulink更加方便地仿真整车上其他控制器或执行器的功能逻辑,实现与实车尽可能一致的行为,包括仿真与智能驾驶域控制器之间的各种握手流程,通过通讯模块与智能驾驶域控制器进行硬线上的实体连接进行交互,充分验证与对手件之间的交互逻辑,测试覆盖度更高。
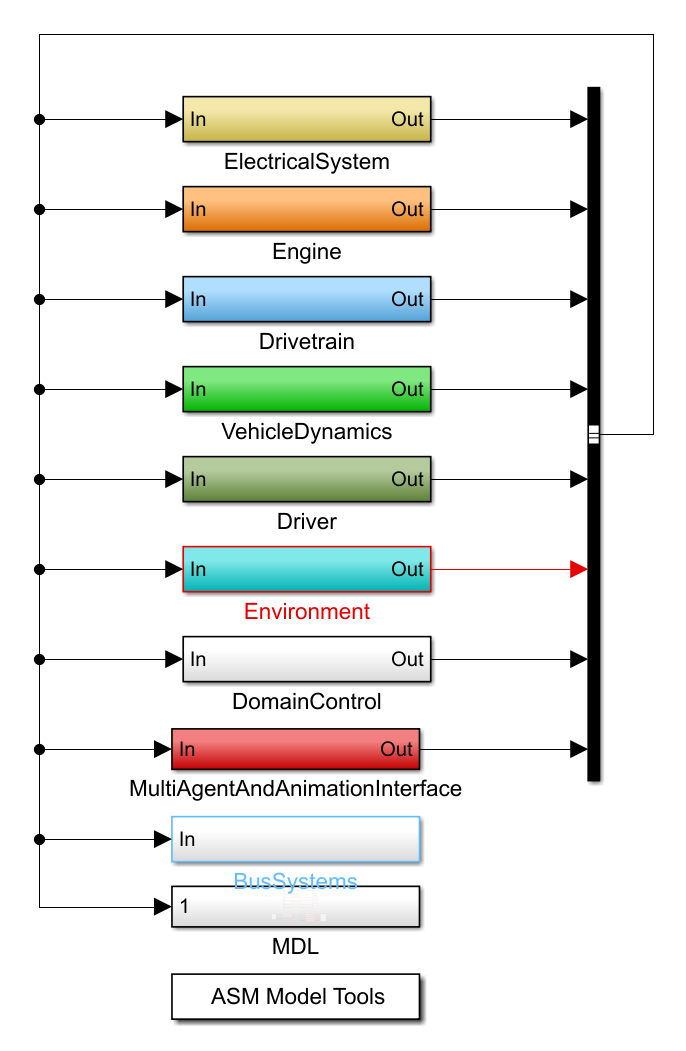
图2 Simulink模型三、多主车HIL仿真
通常业内所说的硬件在环仿真都是对单主车进行HIL仿真,即仿真场景中的车辆只有一个是通过控制器进行控制,其余车辆都是按照预先设定好的运动轨迹进行运动的幽灵车;而多主车验证方案可以接入多个域控制器,模拟多辆真实智能驾驶车在设定的场景下运动甚至互动博弈。多主车HIL仿真利用实时机的多个核,在每个核独立运行一个完整的整车仿真模型,核间通过IPC进行信号交互。目前国汽智控已经将多车主HIL仿真应用于测试环节,可以覆盖智能驾驶功能验证、车云协同、车车协同等相关逻辑验证里面较为复杂的多车场景。
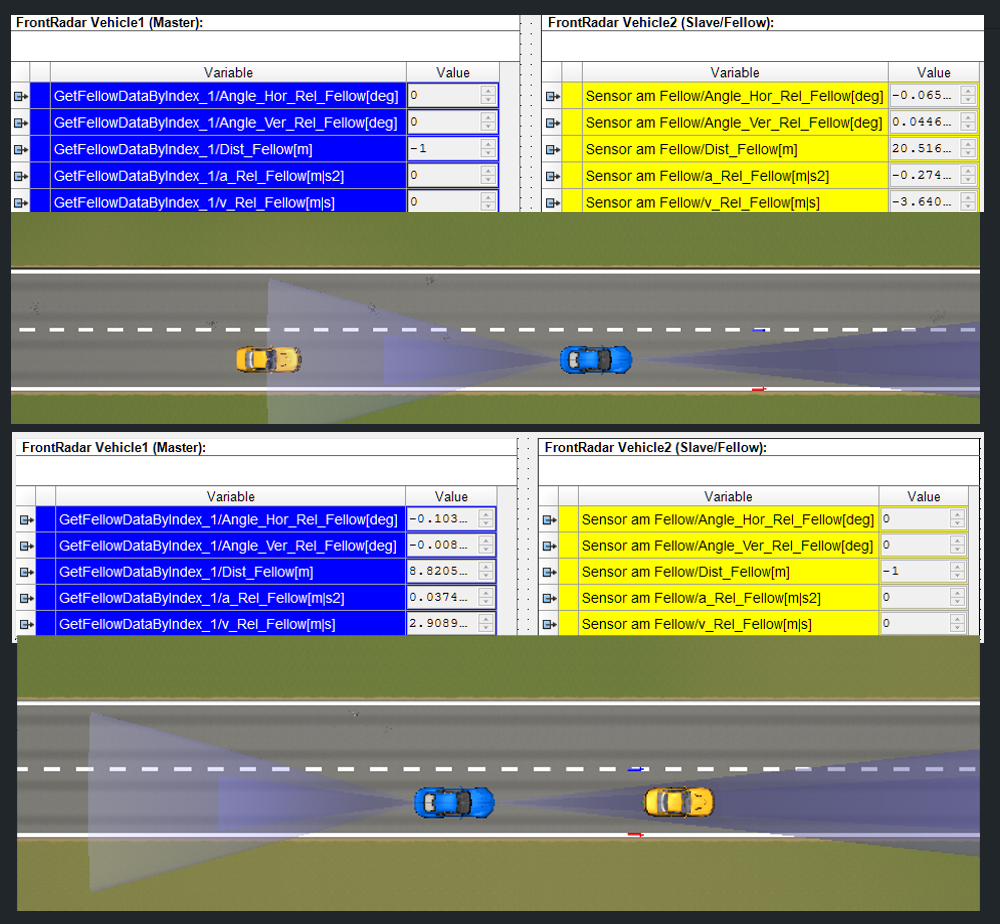
图3 两主车互为fellow
图3中反应的是只有前向雷达的两辆主车互为感知的结果。图中上半部分黄色区域的数据是黄车感知蓝车的数据,蓝车前方没有车,所以蓝色部分数据都是默认值;图中下半部分蓝色区域的数据是蓝车感知前方黄车的数据,而黄车前方没有车辆,所以黄色区域的感知结果都是默认值。多主车HIL仿真方案优势是:1、可以提高测试效率;2、更高的测试覆盖度;3、增加测试场景的复杂度;4、支撑车云协同、车车协同等多车场景的验证;5、为多车博弈的决策算法训练,提供更加真实的验证环境。
四、多主车HIL仿真示例
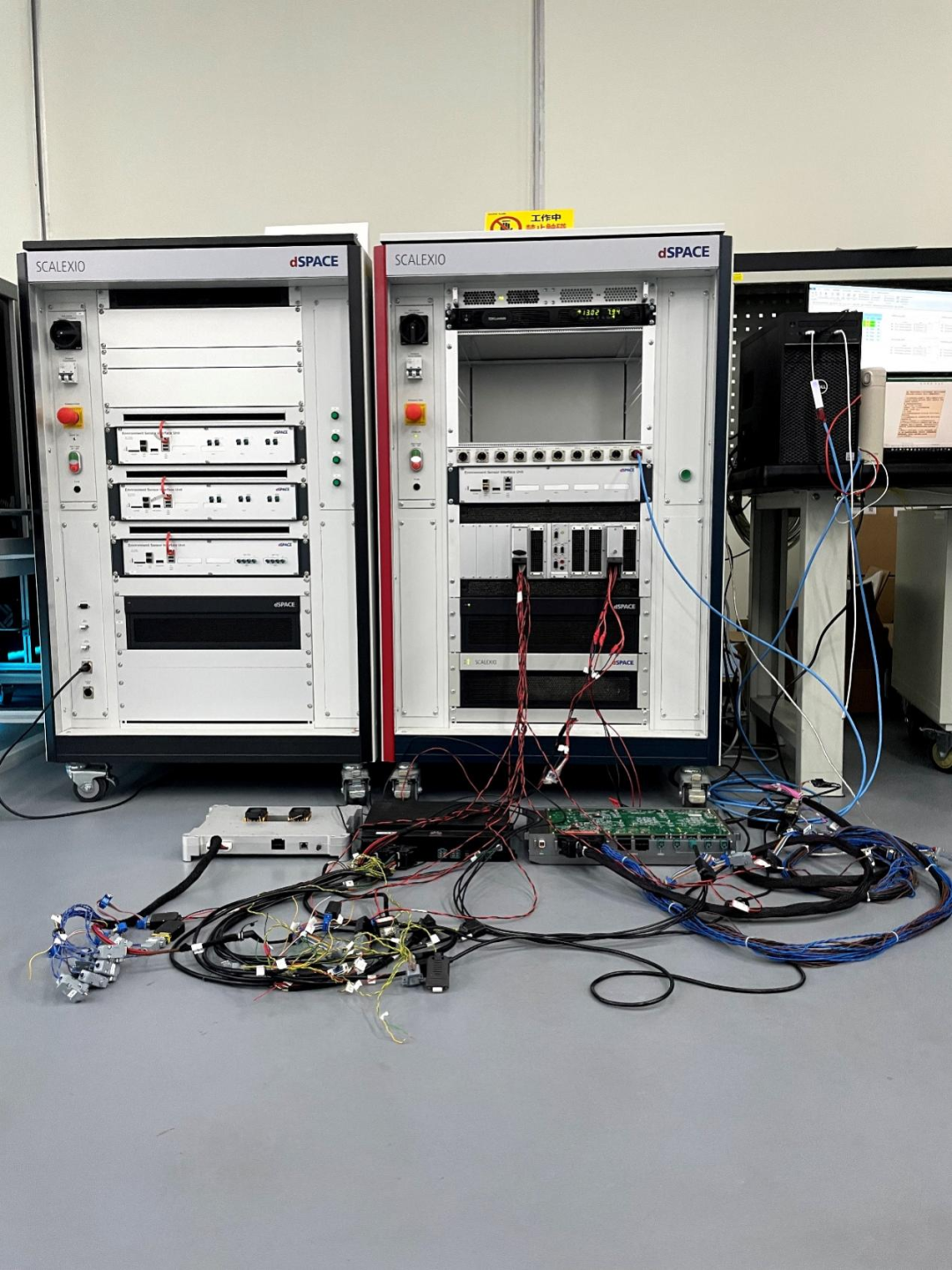
图4 测试现场实景如图4所示,这是一个三主车的HIL仿真验证方案,接入的域控制器分别为黑芝麻A1000、华为MDC300、TDA4(图4中从左往右依次顺序)。三个域控制器内均部署了国汽智控的ICVOS车控操作系统以及在其上开发的智能驾驶应用软件。通过在不同场景内进行HIL仿真,验证了ICVOS及应用软件具有优异的稳定性和实时性。
文末视频中主要展示了多车编队、自动跟车、切入切出、跟起跟停等功能。多主车在场景中互为fellow,可以更加灵活地验证各种功能及场景。国汽智控同时在建的场景库可覆盖从L2到L4上万条场景,是当前业内较为完善的智能驾驶场景库。通过行业领先的测试验证方案及丰富的场景库,助力国汽智控ICVOS不断迭代提高,为公司产品质量提供足够的支撑保障。
作者Arraon,毕业于南京理工大学,拥有多年的汽车电子软件开发测试相关工作经验,先后供职于上汽、理想汽车等整车厂,工作领域主要聚焦在汽车三电、域控制器、智能驾驶等领域。



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
