




 广告
广告





















































浅谈基于自动驾驶运行设计域的测试平台建设思路

与传统车辆相比,自动驾驶车辆是一个更为复杂的系统,对于安全性有着更高要求,安全问题依然是影响自动驾驶规模化应用落地的重要原因。由于自动驾驶系统在感知能力、计算能力、决策规划能力等方面存在一定限制,现阶段难以保证自动驾驶车辆在各种复杂工况下都能安全运行,因此对于自动驾驶车辆需要限定其运行条件,运行设计域(Operational Design Domain, ODD)这一概念应运而生。
ODD一词原始定义来自SAE J3016中“特定驾驶自动化系统或其功能专门设计的运行条件,包括但不限于环境、地理和时间限制,以及某些必要或不必要存在的交通或道路特征”。ODD限制是保证车辆安全的重要手段,换句话,“ODD就是要定义在哪些工况下是能够自动驾驶的,脱离了这些工况,自动驾驶就不能保证有效工作。任何一台自动驾驶车辆,都必须有一定限定的工况,这个工况可以很宽泛,也可以很精准,并决定了自动驾驶车辆能够胜任什么样的场景”。
为了保证自动驾驶车辆的运行安全,解决自动驾驶车辆运行边界条件模糊的问题,结合我国当前实际智慧交通与智能网联汽车发展状况,针对L4级自动驾驶车辆,设计了其运行设计域,并在清华大学苏州汽车科创园内搭建了一个基于运行设计域的测试平台。下面分别浅谈自动驾驶运行设计域的构建、运行设计域测试平台的建设以及测试方案设计方法。
自动驾驶运行设计域的构建
借鉴国外先进自动驾驶运行设计域的构建方法,结合我国当前实际交通条件等信息,设计了L4级自动驾驶车辆的运行设计域,其框架主要由道路条件、行驶路况、交通控制设备和路旁路障、环境条件和V2X构成,具体内容如下表所示。

自动驾驶运行设计域测试平台
根据上述自动驾驶运行设计域框架的具体内容,在清华大学苏州汽车科创园内搭建了一个自动驾驶运行设计域测试平台。测试平台基础设施包括移动式交通信号灯、路口视频监控、桥梁、河流、树木、试验楼、路灯、护栏、混凝土墙、植被等;道路布局主要包括直线路段、弯道路段、道路出入口、环岛、坡道、模拟隧道等路段,另外,测试场内布设有LED信息板作为明显可见的测试状态提醒及警示系统。同时为了满足云控环境下自动驾驶车辆应用的测试需求,除了在车端部署车载通信单元OBU,在路侧部署多模通信路侧单元RSU实现车联网通信外,还在路侧部署了实现全路段覆盖的路侧摄像头、可实现行人与车辆感知的路侧跟踪式微波雷达、增强车端感知能力的GNSS差分基站和支持通过网联方式控制的红绿灯构建路侧智能系统,还部署了网络设施与云控系统服务器作为云控基础平台。测试平台的部分实际场景照片及路侧设备的布点示意图如下所示。

测试平台部分实景图
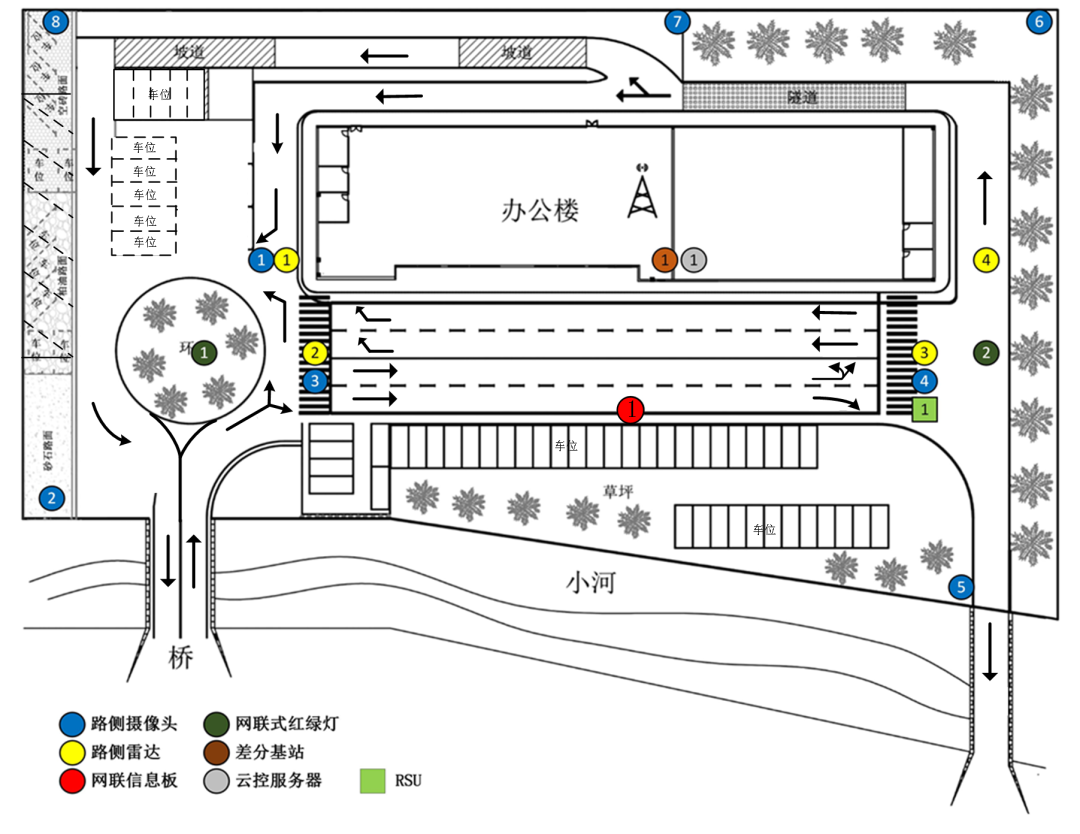
路侧设施布点图
测试方案设计方法
为了测试L4级自动驾驶车辆在上述构建的ODD内能否完成特定自动驾驶功能任务,以此来验证ODD设计的合理性,测试方案中包含的测试功能为:车辆起步、交通标志标线及障碍物的识别、变道通过模拟事故现场、直行、交通信号灯识别及响应、转弯、通过隧道、环形路口通行以及靠路边停车。为了完成上述测试功能,在测试平台内设计了测试路线,利用L4级自动驾驶车辆进行实车测试,并记录了车辆在测试过程的时间和行驶速度,测试路线及测试过程如下图所示。
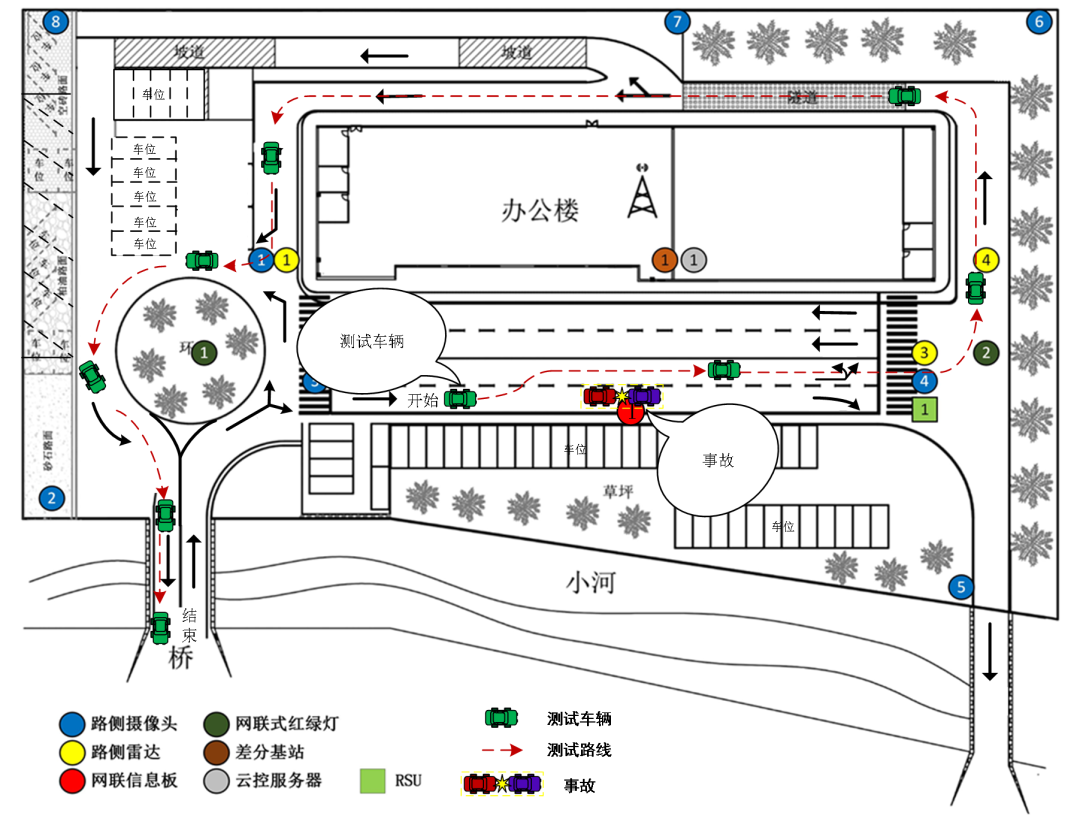
测试路线及过程
结合自动驾驶运行设计域的具体条件,针对我国的实际智慧交通与智能网联汽车发展状况,基于典型交通场景,设计了一个L4级自动驾驶车辆的运行设计域及测试平台。经实车测试验证该测试平台能够满足智能网联汽车测试和试运营的需求,为实现全功能、全场景的全栈架构智能网联汽车实际应用落地提供基础软硬件支持,对我国自动驾驶运行设计域的相关研究工作具有指导意义。
注:本研究部分成果已收录于2022世界交通运输大会论文集。
Jingliang Ming, Chuan Sun, Sifa Zheng, Zhixiong Li, Guisheng Li, Yujun Yue, Haoran Li. Experimental Design of Test Platform for Operation Design Domain of Autonomous Driving: A Case Study in China[C]. //Proceedings of the 2022 World Transport Convention, Wuhan, China, June 13-16, 2022.
- 下一篇:通过CFD优化卡车拖车空气动力学设计
- 上一篇:方形锂电池绝缘低问题分析及其预防措施



 广告
广告 编辑推荐




最新资讯
-
奇石乐持续投资增长型市场,2025年业绩保持
2026-03-13 15:54
-
国际标准《商用车辆 牵引车与挂车之间的电
2026-03-13 13:51
-
比亚迪弗迪电池CEO何龙:二代刀片电池在不
2026-03-13 13:50
-
思看科技AM-CELL C 自动化光学3D检测系统上
2026-03-13 10:40
-
《汽车隔声性能测量与评价方法 第2部分:消
2026-03-12 13:53
