




 广告
广告





















































基于四轮转向和直接横摆力矩控制的自主地面车辆LPV/H∞路径跟踪控制器设计
2022-03-01 20:37:54· 来源:同济智能汽车研究所

图13 单车道变换仿真中的外部横摆力矩
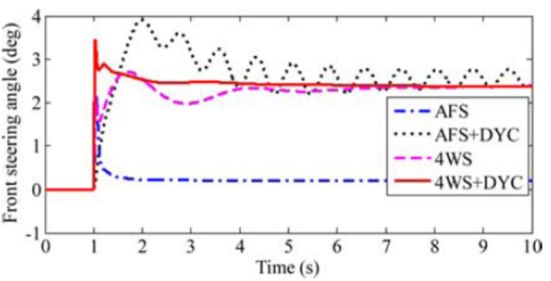
图14 单车道变换仿真中的横向速度
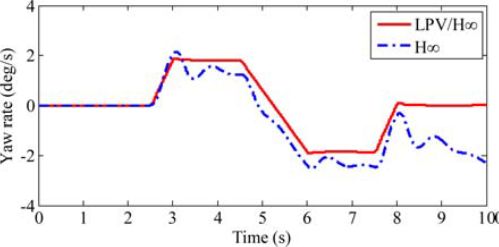
图15 单车道变换仿真中的横摆角速度
4.2. 环形路径操控
在环形路径控中,验证了4WS+DYC控制系统的优越性,并与AFS、AFS+DYC、4WS+DYC进行了比较。以恒定速度20m/s行驶的车辆突然进入半径为115m的环形轨道,路面摩擦系数为0.8。需要注意的是,四种控制系统的路径跟踪控制器均采用LPV/H∞控制器。
图16显示了四种控制系统在环形路径仿真情况下的路径跟踪结果,可以明显看出AFS的跟踪误差最大。此外,横向位置误差和航向角误差分别如图17和图18所示。从图中可以发现,4WS+DYC的横向位置误差和偏航角误差最小,收敛速度最高,这意味着4WS+DYC在四个控制系统中具有最好的路径跟踪性能。此外,可以看出,4WS的路径跟踪性能优于AFS+DYC,这是由于4WS系统可实现后轮转向,有效地减小了车辆的侧滑角,从而减小了路径跟踪误差。
控制变量前后转向角和外部横摆力矩的仿真结果如图19~21所示。图22显示了横向速度的变化,从中可以看出,4WS+DYC可以使横向速度快速减小至零。相比之下,AFS和AFS+DYC横向速度较大,会使操纵稳定性变差,而4WS的收敛速度较慢。图23显示了车辆的横摆角速度。
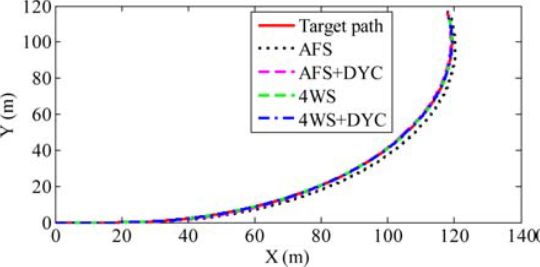
图16 环形路径仿真中的路径跟踪结果
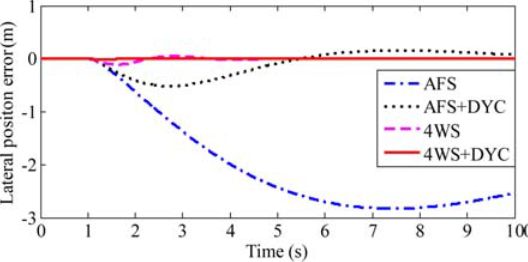
图17 环形路径仿真中的横向位置误差

图18 环形路径仿真中的偏航角度误差
图19 环形路径模拟中的前转向角

图20 环形路径模拟中的后转向角
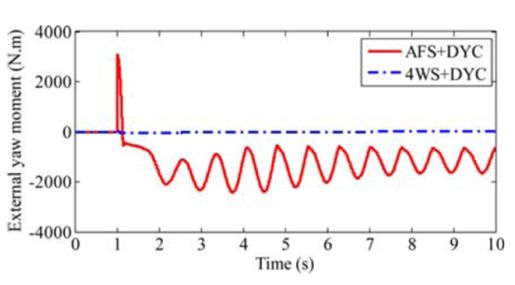
图21 环形路径模拟中的外部横摆力矩
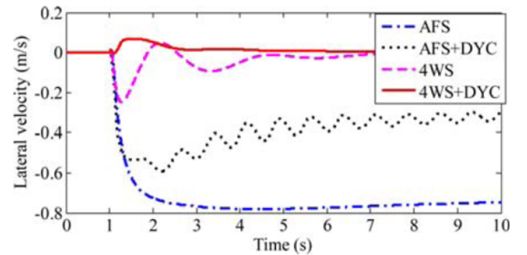
图22 环形路径模拟中的横向速度
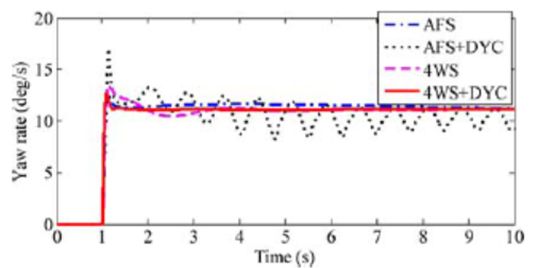
图23 环形路径模拟中的横摆角速度
5 结论
本文提出了一种4WIS-4WID电动汽车的路径跟踪控制方法。以横向位置误差和航向角误差为性能指标,建立了路径跟踪数学模型。为了减小车辆模型不确定性的影响,利用LPV方法将路径跟踪模型转化为具有八个顶点的多面体模型。基于LMI方法,设计高水平的LPV/H∞ 控制器用于4WIS-4WID电动汽车的路径跟踪。下层控制器用于分配左右两侧车轮之间扭矩,产生所需的总纵向力和外部横摆力矩。基于在CarSim中构建的高精度整车模型进行数值模拟,评估所设计控制器的有效性并比较不同控制系统的性能,即AFS、AFS+DYC、4WS和4WS+DYC。仿真结果表明,与固定增益H∞控制器相比,LPV/H∞控制器在低附着系数路面上具有更大的控制潜力。4WS+DYC控制系统具有更好的路径跟踪性能和操纵稳定性。未来将对所提出的路径跟踪控制方法进行实验验证。
- 下一篇:中汽中心的新发展与战略转型
- 上一篇:上汽集团宣布成立“上汽集团创新研究开发总院”。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
