




 广告
广告





















































如何轻松应对《车载卫星定位系统技术规范》的测试?
2022-01-08 21:46:57· 来源:汽车测试网

GNSS定位系统是汽车卫星导航定位系统的关键技术,随着车载卫星导航应用在全球的迅速发展,其功能和性能将越来越完善,精度也将越来越高。本文将介绍R&S SMBV100
GNSS定位系统是汽车卫星导航定位系统的关键技术,随着车载卫星导航应用在全球的迅速发展,其功能和性能将越来越完善,精度也将越来越高。本文将介绍R&S® SMBV100B/SMW200A作为卫星导航模拟器如何轻松应对《车载卫星定位系统技术规范》的测试要求,同时针对高精度卫星导航的解决方案,包括车载卫星定位系统技术规范、高精度卫星导航及自动化测试等方案,本文也将概述。
文末附《罗德与施瓦茨助力车载卫星定位系统技术规范测试》技术白皮书下载方法!
01、《车载卫星定位系统技术规范》
制定的技术背景
随着无人驾驶汽车在汽车行业中变得越来越重要,传统的卫星导航定位精度大概在10米左右,不足以应对自动驾驶和车联网V2X的场景。从目前的L2等级的高级驾驶辅助系统 (ADAS) 到半自动驾驶再到未来的完全自动驾驶 (AD),无人驾驶系统功能的复杂性正在急剧增加。其中,导航在这些应用中扮演着极其重要的角色,从最初的标准定位SPS(Standard Positioning System)需求,发展到现在的高精度定位PPS(Precise Positioning System)需求。也正基于此,国内开始着手制定车载卫星定位系统技术规范标准。

图1 车载导航
02、全球卫星导航定位系统GNSS介绍
卫星导航定位系统主要由空间部分、地面控制部分和用户设备三大部分组成。其中空间部分主要是由GNSS卫星组成。
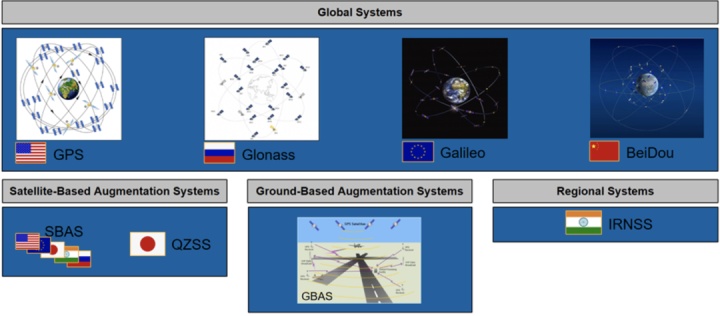
图2 GNSS卫星导航系统
GNSS是Global Navigation Satellite System的缩写,即全球卫星导航系统,它是利用卫星来测量物体位置、速度及授时等功能的系统。中国BeiDou、美国GPS、俄罗斯Glonass和欧盟Galileo为联合国卫星导航委员会认定的全球卫星导航系统四大核心供应商。除此之外,还有辅助导航系统,如星基增强SBAS,区域导航系统,如日本的准天顶QZSS和印度的IRNSS系统等;而GNSS目前主流的频段包括三个频段:L1,L2和L5。
03、实时卫星导航模拟器
SMBV100B与SMW200A
R&S公司的SMBV是一台高性价比的通用矢量信号发生器,具备优异的射频指标,最高频率到6GHz,而SMW则是一台高端的矢量信号发生器,具有业界领先的射频指标,配备双射频通道,且频率最高可到44GHz,SMBV和SMW支持几乎所有的通信和广播标准,通过配置一个或多个可选选件,支持 GPS、Glonass、Galileo和BeiDou,是全能卫星导航模拟器。

图3 R&S SMBV100B(左)与 SMW200A(右)
R&S卫星导航模拟器为接收机测试提供了强大和可靠的单表解决方案,它们提供了以下关键特性:
> 实时导航卫星模拟,支持GPS L1/L2/L5(C/A和P码),Glonass L1/L2,Galileo E1/E5和BeiDou B1/B2/B3;同时还支持SBAS中的QZSS/WAAS/EGNOS/MSAS/GAGAN;
> SMBV最多可支持至102颗卫星;
> SMW最多可支持至612颗卫星;
> 不限的模拟时间,带有卫星空中自动切换功能;
> 静态卫星模拟可配置多普勒频移;
> 模拟产生混合场景的GPS,Glonass,Galileo和BeiDou卫星;
> 静态接收机测试支持自定义或预定义的地理位置;
> 移动接收机测试支持自定义或预定义的轨迹文件(可直接导入NMEA数据):
l KML文件 (Google Earth输出格式)
l Waypoints文件(R&S定义格式)
l txt文件
l NMEA文件
l xtd文件(包括:位置、速度、姿态等信息)
> 对单颗卫星或全部卫星进行实时动态功率控制,模拟卫星可视性变化(遮挡);
> 支持电离层和对流层模型;
> 通过导入Almanac/RINEX文件,支持最新或早期的卫星轨道;
> 可模拟各种动态的遮挡效应和多径效应,如下:
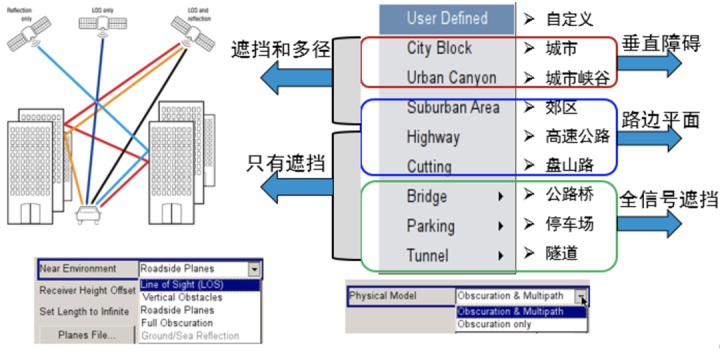
图4 R&S GNSS模拟器所支持的遮挡效应和多径功能
> 可设置的仰角模板,自动移除低仰角的卫星;
> 支持自定义或预定义的A-GPS场景;
> 单表解决方案—无需外部软件或外部电脑;
除了导航卫星模拟外,SMBV/SMW还支持数字通信标准如GSM/EDGE,3GPP/HSPA,LTE,5G NR, WLAN,Wimax,Bluetooth,以及广播标准如FM stereo(带RDS),HD Radio,Sirius和XM Satellite Radio和DAB。今天的移动终端除了GPS/Glonass/BeiDou外还具备以上所述的一种或多种标准,因此拥有一台能够支持所有测试信号产生的单表给用户带来很大帮助。所有信号都是实时产生,无需任何外部软件。
04、车载卫星定位系统技术规范
车载卫星定位系统技术规范主要规定了接收机的性能要求和试验方法两大部分,其中性能要求和试验方法又分为接收独立北斗和通用卫星导航接收两个部分。
车载卫星定位系统技术规范测试项目
车载卫星定位系统技术规范测试项目分为独立北斗和多模卫星导航接收机两个部分,不过也有共同的测试项目:NMEA协议一致性。剩下的测试分为独立北斗和多模混合模式,其测试项目和需求保持一致,只是在测试场景上略有区别,具体的测试项目如下:
表1 接收独立北斗性能和GNSS混合模式测试项目
05、车载卫星定位系统技术规范
测试方案
5.1 车载卫星定位系统技术规范测试连接方案
车载卫星定位系统技术规范所要求的测试,包括:定位性能测试、授时性能测试。
5.1.1 定位性能测试方案框图
基于车载卫星定位系统技术规范要求,对于定位测试来说,不管是接收单独北斗测试还是多模多频导航接收机的测试,罗德与施瓦茨公司的SMBV100B通过射频直连卫星导航接收机即可完成定位性能测试,非常方便,如下图所示:

图5 定位性能测试方框图
5.1.2 授时性能测试方案框图
基于车载卫星定位系统技术规范要求,对于授时测试来说,不管是接收单独北斗测试还是多模多频导航接收机的测试,罗德与施瓦茨公司的SMBV100B通过射频直连卫星导航接收机完成GNSS卫星信号模拟,同时,需要外部提供原子钟给SMBV100B,以提高SMBV100B的时钟精度。对于最后的评估,主要有两种方式:
1:如果卫星导航接收机无法输出1PPS信号,就直接通过UTC时间精度来进行授时性能评估,即如下图绿色连接方式;
2:如果卫星导航接收机可以输出1PPS信号,需要通过RTO或者RTM等示波器完成1PPS信号的比较,从而评估接收机的授时性能,如下图红色部分连接方式。
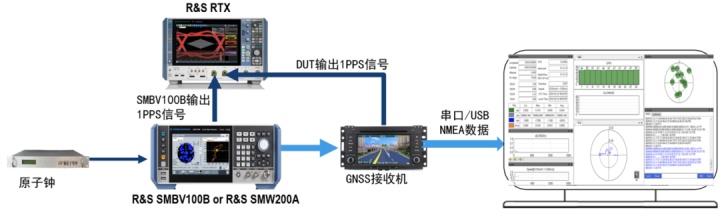
图6 授时性能测试方框图
5.1.3 车载卫星定位系统技术规范全自动测试方案
R&S SMBV100B/SMW200A都支持自动化测试,可以在操作界面手动控制或远程控制。远程控制需要在上位机通过LAN、GPIB或USB连接SMBV。测试连接图如下:

图7 车载卫星定位系统技术规范全自动测试方框图
基于R&S公司的导航自动化测试软件“GNSS Test Automation”,将接收机输出的NMEA数据上报至测试软件,通过软件完成相关项目的自动化测试,节省了大量的人力和物力。其自动化软件可以实现当前车载卫星定位系统技术规范的所有测试需求。
06、车载卫星定位系统
EMC测试方案
车载卫星定位系统技术规范中有对EMC的试验要求:车载卫星定位系统以GB/T 28046.1-2011定义的工作模式进行,按照GB/T 18655-2018中对应章节的方法进行试验。同时,我们也可以参考团标T/CCSA 238.1-2018规范的要求,标准规定了支持GNSS移动通信终端的电磁兼容(EMC)性要求,包括试验条件、限值、性能判据和测试方法等。基于法规要求,罗德与施瓦茨公司实现了相关的电磁兼容EMC测试方案,其方案框图如下:
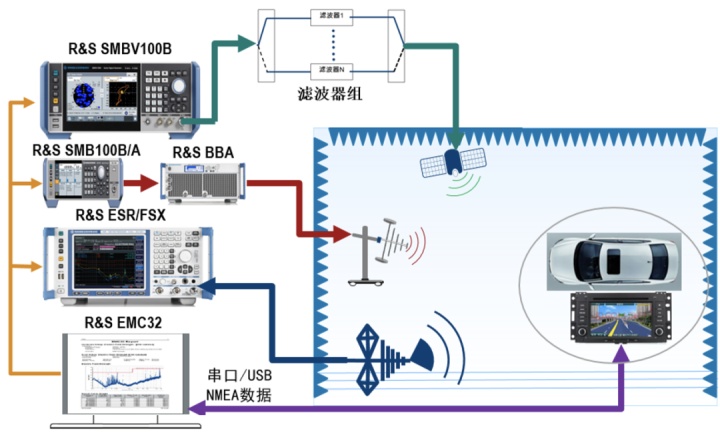
图8 车载卫星定位系统EMC测试方案框图
R&S公司在EMC领域有着广泛的市场、深厚的技术和丰富的经验,基于此,R&S完成了车载卫星定位系统接收机的EMC测试方案,包括对于导航定位系统的骚扰和抗扰度的测试,需要采用以下设备完成测试:
l SMBV100B:卫星导航模拟器,用于和车载定位系统建立导航卫星连接;
l SMB100B/A+BBA:用于抗扰度EMS测试;
l ESR/FSX:用于辐射骚扰和传导骚扰EMI测试;
l EMC32:R&S公司强大的EMC测试软件,可以自动化完成测试,测试过程中,需要将接收机的串口数据通过串口线连接至测试软件。
07、GNSS高精度卫星导航
测试解决方案
随着车联网无人驾驶时代的到来,传统的导航方式已经无法满足精度需求,越来越多的导航接收机都通过各种方式提高了精度指标。包括了多频接收机、动态实时差分定位RTK接收机等。
7.1 GNSS多频导航接收机测试方案
GNSS多频接收机可同时接收同一个导航信号多个频率的载波信号。利用多频载波信号受电离层延迟影响的差异性,可以消除电离层对电磁波信号的延迟的影响。因此,GNSS多频接收机可用于长距离精密相对定位。另外,GNSS多频接收机借助于在两个频率上或多个频率上的观测可加速整周模糊度的解算。

图9 双频(L1+L2/L5)接收机或多频(L1+L2+L5)测试框图
中高端导航模拟器SMBV100B可以非常方便地单台仪表产生多频GNSS信号,完成L1+L2/L5或者L1+L2+L5的双频或者三频接收机测试。
7.2 载波相位实时动态差分接收机RTK测试
载波相位动态实时接收机RTK:Real - Time Kinematic。是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。这是一种新的常用的GNSS测量方法,以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是GNSS应用的重大里程碑。本身上是差分定位接收机,只是校正数据通过移动网络或私有网络实时传输到GNSS用户,而不像普通的差分定位接收机是通过将校正数据拷贝到测量接收机里面,一般RTK接收机具备载波相位测距功能。其工作原理如下:

图 10 DGNSS/RTK接收机工作原理框图
改正数据采用RTCM格式,通过两种方式传输给流动站:
> 通过互联网实时传输到GNSS用户,基于NTRIP传输协议他。使用互联网的优点包括没有范围限制,多个 RTK流动站用户能够同时进入到独立的参考站和少的连接费用;
> 通过移动网络实时传输,如:4G/5G移动网络播发RTCM数据,流动站接收4G/5G信号,然后解码RTCM数据,即可改正定位精度。

图11 DNSS/RTK接收机测试框图,改正数据通过网络(左)和改正数据通过LTE/5G网络(右)
08、小结
本文主要介绍了车载卫星导航定位系统的技术规范产生的背景、车载卫星定位系统技术规范的测试需求。基于此,R&S公司的导航模拟器SMBV100B可以非常方便地通过单台仪表完成车载卫星定位系统技术规范测试,同时,也提到了高精度卫星导航定位接收机的测试方案。
在GNSS接收机测试环境中使用的标准GNSS信号仿真器可为工程师提供最大的灵活性,帮助他们实施调整和控制,轻松地进行重复测试。灵活的信号源不仅支持GNSS接收机测试,还支持其他无线制式和标准测试。
欢迎您与我们联系,以获得对您下一代汽车设计有益的帮助。
《GNSS导航系列线上研讨会》
欢迎参加,与工程师面对面

报名福利
报名参加会议,获得完整版《罗德与施瓦茨助力车载卫星定位系统技术规范测试》技术白皮书!
长按二维码报名参会,下载白皮书

- 下一篇:基于区域的网格化多区域热交换器
- 上一篇:宁德时代未来能源研究院正式成立



 广告
广告 编辑推荐




最新资讯
-
市场监管总局:去年召回684万辆汽车,通过
2026-03-20 13:46
-
联合国法规R80对大型客车座椅及固定点强度
2026-03-20 12:18
-
千亩级基地开跑!比亚迪“5分钟充电”电池
2026-03-19 17:18
-
安全调试不踩坑!Workbench安全功能配置,
2026-03-19 17:10
-
联合国法规R89对车辆速度限制装置的工程化
2026-03-19 12:21
