




 广告
广告





















































汽车悬架橡胶衬套静刚度设计方法
2021-09-29 08:57:19· 来源:汽车NVH云讲堂 作者:胡培龙

摘要:基于刚度叠加法的原理、非线性有限元分析及优化理论,提出了悬架衬套3 个方向静刚度的设计方法。以某乘用车悬架橡胶衬套的三向静刚度设计为例论述了该方法
摘要:基于刚度叠加法的原理、非线性有限元分析及优化理论,提出了悬架衬套3 个方向静刚度的设计方法。以某乘用车悬架橡胶衬套的三向静刚度设计为例论述了该方法的有效性。该方法对悬架衬套三向静刚度的设计具有指导意义。
关键词:橡胶衬套;三向静刚度;刚度叠加;有限元分析;优化设计
汽车悬架橡胶衬套为悬架系统中重要的弹性元件,三向静刚度是衬套的重要性能参数,该参数对汽车的操纵稳定性和平顺性具有较大影响[1]。在计算悬架衬套的三向静刚度时,目前大都采用试凑的方法,或者利用工程中的一些简单计算公式进行计算[2 - 4]。根据某乘用车悬架系统橡胶衬套的三向静刚度设计要求,基于刚度叠加法、非线性有限元分析和优化理论,文中提出了悬架衬套3 个方向静刚度的设计计算方法。首先对衬套进行参数化,利用ABAQUS 软件计算衬套的三向静刚度与一系列衬套参数的关系; 然后进行数据拟合,得到衬套的三向静刚度与衬套参数的关系; 最后通过优化计算,得出满足衬套三向静刚度要求的衬套参数。给出了一个计算分析实例,说明了文中论述方法的有效性,该方法可以提高悬架衬套三向静刚度的设计效率。
1 衬套的参数化和参数的确定
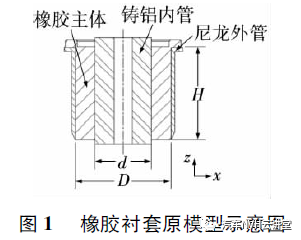
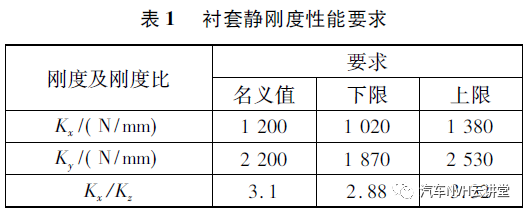
图1 为要求设计的橡胶衬套安装图。橡胶体的内外表面分别与铸铝内管、尼龙外管硫化。其中高度H、内径d 和外径D 是橡胶体的主要尺寸。衬套三向静刚度的要求见表1。
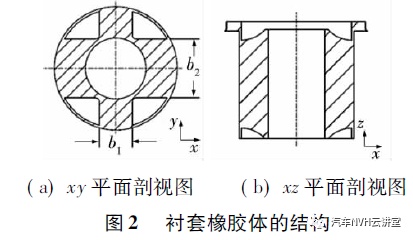
由于该悬架衬套2 个径向刚度( Kx,Ky ) 的要求值不一样,为此把衬套在xy 平面内的橡胶体设计成如图2 所示的十字架形状。衬套的橡胶体用2 个宽度参数b1,b2 进行离散化。
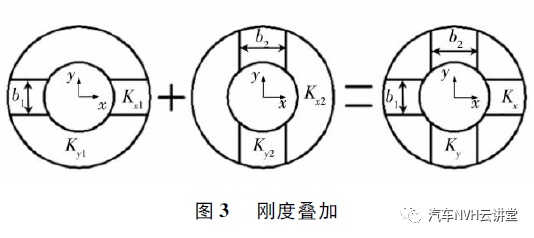
参见图3,橡胶衬套的三向静刚度( Kx,Ky,Kz ) 是相应方向的刚度值,可用如下刚度叠加的方法进行计算:
Kx = Kx1 + Kx2 ( 1)
Ky = Ky1 + Ky2 ( 2)
Kz = Kz1 + Kz2 ( 3)
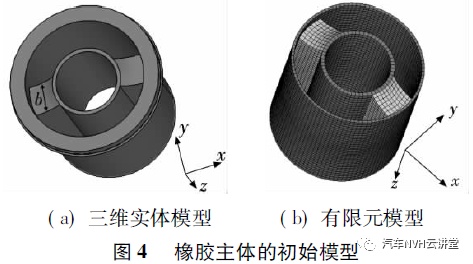
因此,可以先把衬套设计成图4a 的形状,这时只有一个尺寸变量,即橡胶体的宽度b,这样便于刚度计算。
利用有限元方法[5] 计算图4a 所示结构的三向静刚度过程为: 首先用Pro /E 建立一系列三维实体模型[6],然后用HyperMesh 对这些模型划分网格,再在ABAQUS 中进行三向静刚度的仿真计算,最后找出宽度b 分别与Kx,Ky 和Kz 的关系。
利用ABAQUS 中的M-R 模型对图4b 所示的衬套进行静刚度计算,采用邵氏60° 的橡胶,橡胶材料参数的测定方法可以参考文献[7]。
在进行衬套的静刚度计算时,由于橡胶体内表面与铸铝内管硫化在一起,因此把该面上所有的结点与一个参考点( 一般取内表面的中心点) 用刚性连接耦合在一起,并以该点作为加载点,在加载点施加x 方向的位移,通过计算可获得该点的反力。
由于外表面与尼龙外管硫化在一起,并且该外管固定在一个安装孔里,因此,在进行边界条件定义时,令该面上所有的结点位移为0。橡胶体网格类型为C3D8RH 单元。
表2 给出了橡胶宽度b 不同时,计算得到的图4a所示衬套在3 个方向的静刚度。

用二次多项式拟合Kx1 和Ky1 与b 的关系,用线性关系式拟合Kz1 与b 的关系,其结果如下:
Kx1 = 0. 916 2b2 + 22. 058b + 132. 86
Ky1 = 0. 114b2 + 3. 918 8b - 7. 367 8
Kz1 = 6. 808 7b + 2. 043 9
由式( 1) ~ 式( 4) ,得到衬套刚度的计算公式为:
Kx = 0. 916 2b21+ 22. 058b1 + 0. 111 4b22+ 3. 918 8b2 +125. 49
Ky = 0. 111 4b21+ 3. 918 8b1 + 0. 916 2b22+ 22. 058b2 +125. 49
Kz = 6. 808 7( b1 + b2 ) + 4. 087 8
λ = Kx /Kz ( 5)
根据式( 5) 和表1中衬套的设计要求,利用如下优化模型求解衬套参数b1 和b2。
优化目标: Min b21+ b22
约束条件: ( 1) 1 020 N/mm ≤ Kx ≤1 380 N/mm;
( 2) 1 870 N/mm ≤ Ky ≤2 530 N/mm;
( 3) 2. 88 ≤ λ ≤3. 32;
( 4) 6 mm ≤ b1 ≤33 mm;
( 5) 6 mm ≤ b2 ≤33 mm。
采用序列二次规划算法[8],优化结果为b1 = 18mm,b2 = 32 mm( 注: 优化目标的设定是为了使得橡胶体的体积最小,从而使质量最小) 。
2 橡胶衬套三向静刚度的有限元计算
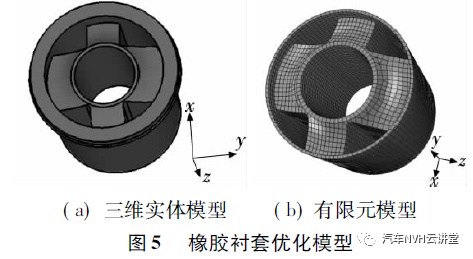
根据优化出来的b1 和b2,橡胶主体的三维实体模型如图5a 所示。在x 向和y 向的橡胶体交接处做了倒圆角处理,其他地方也适当的做了一些倒圆角的处理。
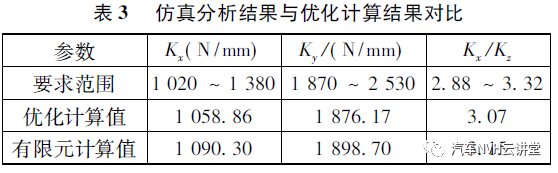
按照第1节的方法对图5a所示模型进行有限元分析,仿真计算其三向静刚度,有限元模型如图5b 所示。仿真分析结果与优化计算结果如表3 所示。
从表3 可见,设计出来的模型符合三向静刚度的要求范围,有限元的仿真结果与利用刚度叠加的计算结果有2% 左右的误差,主要是由于某些地方做了倒圆角处理所致的。两者计算结果的一致,证明了刚度线性叠加的正确性。
3 结论
利用刚度叠加法的思想、非线性有限元分析和优化理论对某个悬架衬套3 个方向静刚度进行设计。从优化结果和有限元分析结果的对比可知,文中论述的方法是正确的,在实际生产设计过程中可通过该方法来设计相似的产品,可减少产品设计生产的周期,对指导设计生产具有重要的意义。
作者:胡培龙,上官文斌
作者单位:( 华南理工大学机械与汽车工程学院,广东广州510640)
来源:机械设计胡培龙,上官文斌
( 华南理工大学机械与汽车工程学院,广东广州510640)



 广告
广告 



最新资讯
-
奇石乐持续投资增长型市场,2025年业绩保持
2026-03-13 15:54
-
国际标准《商用车辆 牵引车与挂车之间的电
2026-03-13 13:51
-
比亚迪弗迪电池CEO何龙:二代刀片电池在不
2026-03-13 13:50
-
思看科技AM-CELL C 自动化光学3D检测系统上
2026-03-13 10:40
-
《汽车隔声性能测量与评价方法 第2部分:消
2026-03-12 13:53
