




 广告
广告





















































Mobileye在CES2021上的演讲分析
2021-03-01 14:13:26· 来源:燃云汽车

最近的一段时间内,我们的关注热点还是以计算机视觉为基础的自动驾驶识别技术。在当下业内广泛的理解当中,当然Tesla和其Autopilot自动驾驶技术是纯视觉自动驾驶流派毫无争议的代表,但实际上如果深挖细品,你就不可能忽视另外一个巨头——Mobileye和其创始人
最近的一段时间内,我们的关注热点还是以计算机视觉为基础的自动驾驶识别技术。在当下业内广泛的理解当中,当然Tesla和其Autopilot自动驾驶技术是纯视觉自动驾驶流派毫无争议的代表,但实际上如果深挖细品,你就不可能忽视另外一个巨头——Mobileye和其创始人Shashua教授的存在。而且从某种程度上讲,Mobileye还应该算是Autopilot在视觉感知系统领域的师傅和领路人。2014年,在Model S的演进过程中,Elon Musk是率先采用了Mobileye的Eye Q3芯片和配套前向单目摄像头,虽然Tesla自己扮演了Tier-1的角色,整合了来自博世Bosch的毫米波雷达,但如果单论视觉识别技术在自动驾驶领域的应用起步,毫无疑问是师从Mobileye的。
2年后,发生在2016年的致命事故(佛罗里达的Model S在AP状态下撞击横穿马路的集卡车厢),间接导致Mobileye和Tesla的分道扬镳其实不算奇怪,以Elon Musk的性格,是不可能长时间在关键的自动驾驶领域内长期仰人鼻息的;但后续2017年,作为以色列的高科技代表性企业,Mobileye选择被Intel收购(150亿美元),才是真正令人感到意外。商业上的考量不是我们讨论的重点,但后续Intel连续并购自动驾驶领域内的相关公司,包括去年收购移动服务解决方案公司Moovit,也许可以解释Mobileye和Shashua教授希望可以在更大平台上施展拳脚的决心。其雄心之大,正如我们在之前的公众号文章中所展示的Mobileye的产品规划,如下图:
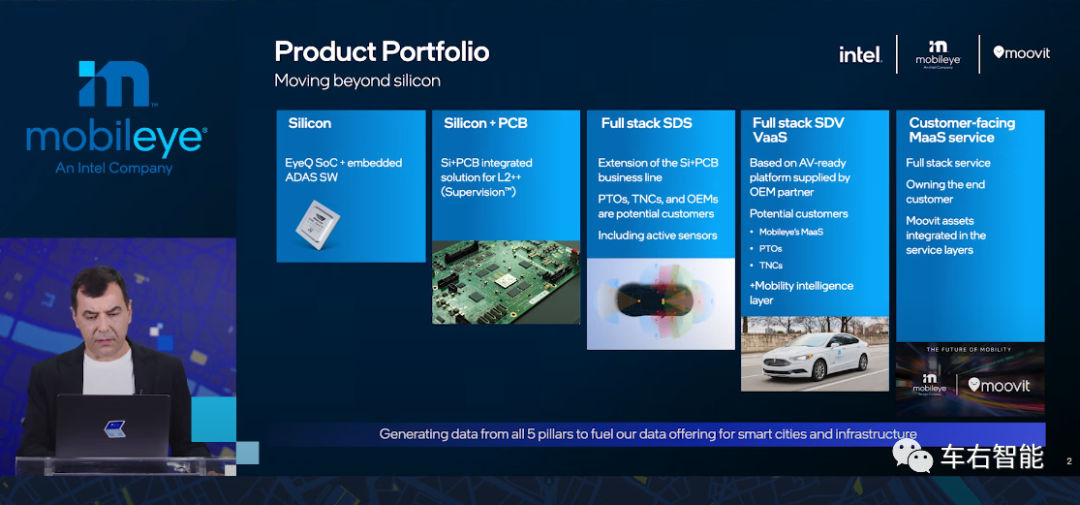
Intel涉足自动驾驶行业依赖的就是Mobileye和moovit。具体的产品划分就是这五个层次:
1 Silicon,提供EyeQ套片和配套的ADAS software,不涉及传感器。在silicon层面的主机或者自动驾驶系统合作方,需要主动地、独立地扮演Tire-1的集成角色,而不需要依赖Mobileye。但如果是以EyeQ为核心的视觉自动驾驶系统的实现,其能力范围仅限于标准的Level-2,而不会更高,因为Mobileye仅提供ADAS的软件能力;
2 Silicon+PCB,目标是实现所谓的“L2++”自动驾驶辅助系统,因此这是一个超过传统EyeQ独立套片范围的、更大的自动驾驶辅助系统PCB板级解决方案,如下逻辑结构:
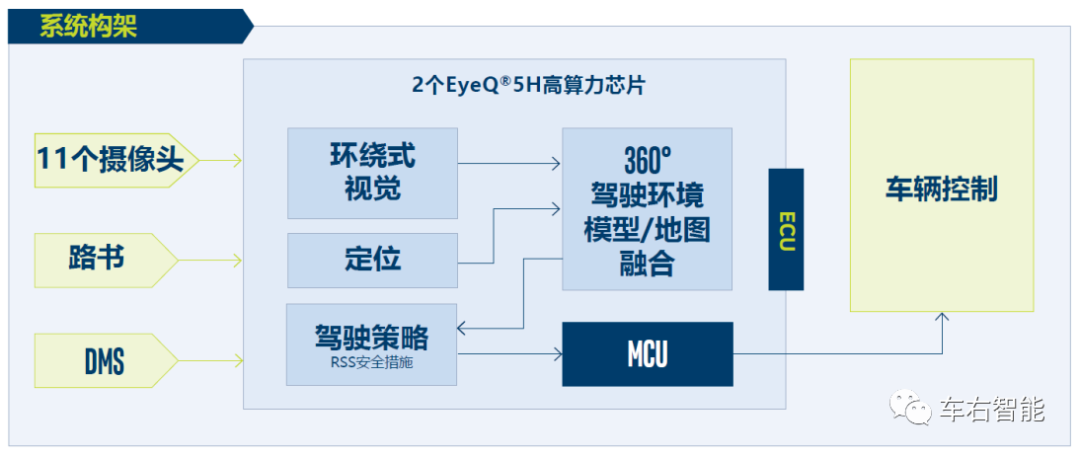
在Silicon+PCB的产品实现中,Mobileye提供处理多达11个Cameras的360度环绕视觉信号处理能力,单一的EyeQ芯片已力不从心,因此提供2个EyeQ-5H的组合。除此之外在PCB上还提供独立的定位能力,虽然方案中没有提供定位实现的技术细节,但如果是联合Mobileye的REM高精地图(Road Experience Management),那么这个定位能力应该也是基于视觉即时信号和REM地图信息匹配计算的定位能力。另外PCB方案中还提供Mobileye独有的RSS安全模型(Responsibility Sensitivity Safety),在RSS的限定下,最终提供给车辆控制机构以合格的控制信号。在这个产品实现中,Mobileye将提供给主机厂合作伙伴一个相对完整的自动驾驶“系统级别”的能力转移,因为这里不仅仅包含Mobileye所提供的芯片和软件体系,还包含Mobileye长期累积和建立的高精地图和RSS模型能力,因此虽然Silicon+PCB产品对应的还是辅助驾驶系统,但按照Mobileye的定义,应该是一种完全可以脱手的L2++自动驾驶辅助系统。需要注意的是,目前我们还不知道哪家主机厂家敢于部署完全依赖视觉,而彻底放弃毫米波雷达的自动驾驶方案。据说吉利是最有可能的合作伙伴(linkco系列)。
3 Full stackSDS,即全栈自动驾驶系统供给方式。基本上我们可以理解这种方式为Silicon+PCB方式再增加全套Mobileye的传感器,基本实现端到端的自动驾驶系统的交付能力。对于传感器的整合,将Mobileye推向典型的Tier-1角色,从感知子系统、规划子系统到控制子系统,再到传感器的性质和布局(物理布局)都可以完整采用Mobileye的预定义方案,从而加快合作方的车辆研发周期。
4 VaaS/Fullstack SDV方式,即车辆即服务,Vehicle as a Service。在这种产品供给方式下,Mobileye将联合合作伙伴(主机厂家)向目标客户直接提供具备自动驾驶能力的机动车辆,潜在的目标客户比如当前成熟的出租车运营公司,类似上海的“锦江”、“强生”等出租车业务运营商。当然这种产品模式可行的前提是,需要Mobileye可以提供完全自动驾驶的Robotaxi车辆。
5 MaaS则是更高层面的一种服务提供能力,Mobile as a Service,出行即服务。在这个产品提供能力中,Intel整合的moovit就不可或缺了。在这种合作中,Mobileye的Robotaxi和moovit自动化出行服务平台将得到整合,Moovit即可以实现完整的出行服务运营商,或者直接出售给类似Uber或者滴滴类的出行服务平台。
以上层层递进的产品提供能力,可以看到不仅是对Mobileye提供的自动驾驶能力的考验,也是对更大的出行服务平台moovit的整合考验,这和Elon Musk曾经多次在公开场合讨论过Tesla的Robotaxi计划相类似。对于moovit和Mobileye的整合,可以参考下图:
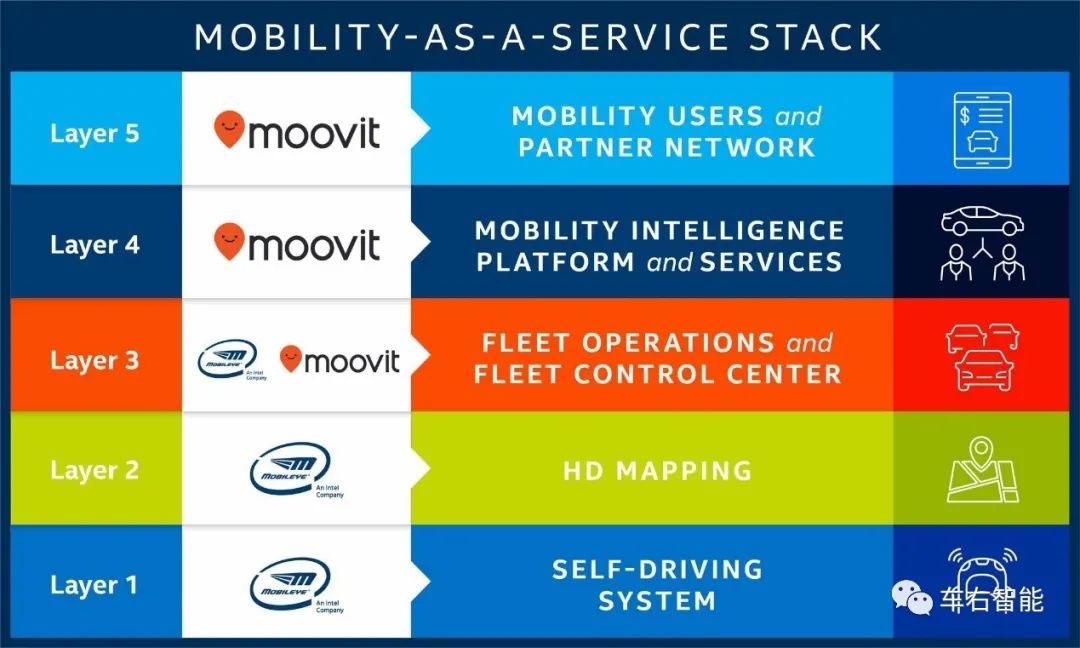
从下往上,展示了MaaS平台的五层架构,其中Layer1和2的能力建立是由Mobileye来提供的,Layer1即是装备Mobileye自动驾驶系统的各种实体交通工具,Layer2则依赖于Mobileye的REM众包地图管理方式来建立。在这个系列文章中,我们会相对详细讨论Mobileye的REM地图建立方式,并试图和藏在Autopilot背后的地图模式进行技术对比。如果仅从MaaS的角度考虑,moovit现有的城市出行数据库对于Layer2的HDMap建立同样是有效的,从更为细颗粒度的个体交通参与者的运动方式和趋势,来描绘城市范围的交通流向,这就涉及如何衔接对于自动驾驶机器路径的规划和人类出行的规划,将二者融合是一个很大的课题。从Layer3起,moovit的平台技术将会发挥主导作用,针对有不同业务部署需求的运营者就可以提供不同的选择,比如我们经常谈到的VaaS、DaaS、MaaS等等:
1 对于VaaS运营方式,可以面向现有的出租车服务提供商,提供具备自动驾驶能力车队调度,为对于Vehicle有需求的终端客户提供服务;
2 对于DaaS运营方式,可以面向现有的车辆租赁服务提供商,提供具备自动驾驶能力的车辆租赁,为对于Driving有需求的终端客户提供服务;
3 对于MaaS运营方式,则可以最高上升到Level5,由moovit和各种生活和产品服务提供商直接对接,最终实现根据终端客户的最终需要来安排最佳的出行服务。
关于这个解释或者对于MaaS服务和运营的描述可能有点晦涩,小编在这里可以举个例子:比如您在家休息的时间打算去看电影,如果moovit只能做到Level-4,则需要您分别online订购电影票和RoboTaxi车费,并自己做行程规划。但如果moovit/mobileye最终可以实现在Layer-5的层面上提供更好的MaaS服务,则moovit的平台有能力和自己对接合作的所有影院服务,联合在一起为您提供只需支付一次并且在距离成本、时间成本、资金成本同时实现三个方向的最优化的订单。这就是MaaS,比Elon Musk谈及多次的RoboTaxi更好更完整的出行解决方案。
这也是为什么在自动化驾驶的单纯的技术工业化行业里,为什么层出不穷地,始终有不算太工业化和技术化的玩家存在,比如Lyht、滴滴、Uber…. 因为他们基于RoboTaxi现实的利益确实极大。如果从这个角度考虑,作为计算机视觉科学家出身的Shashua教授,能够把眼光跨越自动驾驶技术之外,进一步聚焦到整合出行业务,确实眼光非凡。打通MaaS业务平台的关键条件之一,即为Mobileye所定义的“高精度地图”REM,按照Shashua教授的评论,REM并不等同于传统的高精度地图,而是根据Mobileye实际自动驾驶系统开发经验进行取舍之后的的“AVMap/自动驾驶地图”。其建立和构成的大致含义如下图:

Crowd-sourcing众包方式提供地图数据,经过Harvesting过程之后,完全交给机器后台执行Alignment操作,尽可能降低制图成本,最终通过对于众包数据的对齐——模型化——语义分析三个过程,提供足够Mobileye自动驾驶系统使用的AVmap。本质上讲这个思路和Autopilot系统背后的Tesla map非常类似,如下:

Autopilot没有高精地图,不代表Autopilot不使用任何地图技术,除了操控面板上针对用户的Goolge Map,在后台借用Tesla庞大的Fleet所搜集的结构化信息也在扮演和Mobileye的AVmap相同的角色……
我们在后续的公众号文章中将详细讨论两者实现的方式和差别。
备注:
1 题图来自互联网搜索;
2 文中插图1/4来自于教授Shashua在CES2021上的主题演讲中的截图, URL https://www.youtube.com/watch?v=B7YNj66GxRA;
3 文中插图2来自于“电子说”关于supervision的评论文章插图,URLhttp://www.elecfans.com/d/1385039.html;
4 文中插图3来自于http://www.3snews.net/enterprise/363000061189.html,原始数据由Intel提供;
5 文中插图5来自于@green的推文截图。

声明:本文内容及图片由BC-AUTO转载至网络,信息来源于公众号车右智能。



 广告
广告 编辑推荐




最新资讯
-
展会预告 | TCT亚洲展倒计时!思看科技五大
2026-03-10 20:50
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
