




 广告
广告





















































自动驾驶运动规划(Motion Planning)-车辆运动学模型
2020-01-19 19:03:02· 来源:半杯茶的小酒杯

要控制车辆的运动,首先要对车辆的运动建立数字化模型,模型建立的越准确,对车辆运动的描述越准确,对车辆的跟踪控制的效果就越好。除了真实反映车辆特性外,建
要控制车辆的运动,首先要对车辆的运动建立数字化模型,模型建立的越准确,对车辆运动的描述越准确,对车辆的跟踪控制的效果就越好。除了真实反映车辆特性外,建立的模型也应该尽可能的简单易用。自行车模型(Bicycle Model)是一种常见的车辆运动学模型。
自行车模型(Bicycle Model)的建立基于如下假设:
1)不考虑车辆在垂直方向(Z轴方向)的运动,即假设车辆的运动是一个二维平面上的运动。
2) 假设车辆左右侧轮胎在任意时刻都拥有相同的转向角度和转速;这样车辆的左右两个轮胎的运动可以合并为一个轮胎来描述。
3)假设车辆行驶速度变化缓慢,忽略前后轴载荷的转移。
4) 假设车身和悬架系统都是刚性系统。
5)假设车辆的运动和转向是由前轮驱动(front−wheel−only)的。
1、以后轴为原点的车辆运动模型

自动驾驶中的车辆模型可以简化为二维平面上运动的刚体结构,任意时刻车辆的状态,车辆坐标的原点位于后轴的中心位置,坐标轴与车身平行。s表示车辆的速度,表示steering angle(左为正,右为负),L表示前轮和后轮的距离,如果steering angle保持不变,车辆就会在原地转圈,半径为。
车辆运动模型:
在一个非常短的时间内,可以近似认为车辆按照车身的方向运动,、表示在时间内车辆在x轴、y轴移动的距离。
由
可以推出:
用表示时间内车身运动的距离,于是由
可以推出:
对等式两侧除以,并且基于
的条件可以最终得到等式:
至此一个简化的非完整约束的车辆运动模型完成了,汇总如下:
基于这个简单的运动学模型,在给定了某个时刻的控制输入(a, )以后,我们就可以估算车辆在下一时刻的状态信息(坐标,偏航角以及速度)。
2、以质心为中心的车辆运动学模型

其中A点是前轮,B是后轮,C为车辆质心点,O为OA、OB的交点,是车辆的瞬时滚动中心,线段OA、OB分别垂直于两个滚动轮的方向;为滑移角(Tire Slip Angle),指车辆行进方向和轮圈所指方向两者间所成的角度;为航向角(Heading Angle),指车身与X轴的夹角。
符号定义符号定义A前轮中心B后轮中心C车辆质心O转向圆心
后悬长度
前悬长度V质心车速R转向半径
滑移角
航向角
后轮偏角
前轮偏角

展开公式(1.1)(1.2)可得:

联立公式(1.3)(1.4)可得:

低速环境下,车辆行驶路径的转弯半径变化缓慢,此时我们可以假设车辆的方向变化率等于车辆的角速度。则车辆的角速度为:

联立公式(1.5)(1.6)可得:

则在惯性坐标系XY下,可得车辆运动学模型:

此模型中有三个输入:、、和V。
滑移角可由公式(1.3)(1.4)求得:

作为一种自行车模型,运动学自行车模型也假定车辆形如一辆自行车,整个的控制量可以简化为,其中a是车辆的加速度,踩油门踏板意味着正的加速度;踩刹车踏板意味着负的加速度; 是方向盘转角。
前轮驱动的车辆运动模型

当车辆为前轮驱动(front−wheel−only)时,可假设恒为0,同时由于我们假设汽车是前轮驱动的,所以我们认为方向盘的转角就等于前轮的转角。此时,车辆运动学公式如下:

3、阿克曼转向几何(Ackerman turning geometry)
阿克曼转向几何(Ackerman Turning Geometry)是一种为了解决交通工具转弯时,内外转向轮路径指向的圆心不同的几何学。
在单车模型中,将转向时左/右前轮偏角假设为同一角度,虽然通常两个角度大致相等,但实际并不是,通常情况下,内侧轮胎转角更大。如下图所示。
阿克曼转向几何
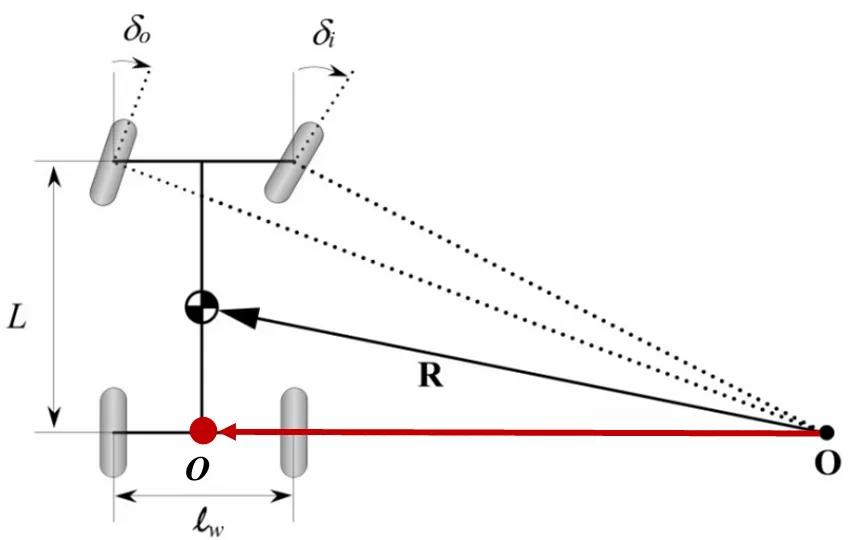
和分别为外侧前轮和内侧前轮偏角,当车辆右转时,右前轮胎为内侧轮胎,其转角较左前轮胎转角更大。为轮距,L为轴距,后轮两轮胎转角始终为0°。当以后轴中心为参考点时,图中红线为转向半径R。
当滑移角很小时,且后轮偏角为0时,公式(1.7)可表述为:
由于内外侧轮胎的转向半径不同,因此有:
则前轮平均转角:
内外转角之差:
因此,两个前轮的转向角的差异与平均转向角的平方成正比。
依据阿克曼转向几何设计的车辆,沿着弯道转弯时,利用四连杆的相等曲柄使内侧轮的转向角比外侧轮大大约2~4度,使四个轮子路径的圆心大致上交会于后轴的延长线上瞬时转向中心,让车辆可以顺畅的转弯。




 广告
广告 编辑推荐




最新资讯
-
跨越半世纪的理论与实证双重验证:HBK标准
2026-03-25 12:12
-
选择合适的扭矩传感器 - 实现更高性能选型
2026-03-25 10:12
-
极限驾驶靠什么实现?智能底盘系统架构深度
2026-03-25 10:11
-
智能底盘如何重构极限驾驶边界:定义与性能
2026-03-24 17:01
-
选择合适的扭矩传感器 - 实现更高性能选型
2026-03-24 13:02
