




 广告
广告





















































激光雷达该何去何从?
2021-12-10 23:17:06· 来源:佐思汽车研究 作者:周彦武

限制L3/L4大规模推广的因素很多,激光雷达也是其中之一。目前最常见360度旋转型激光雷达在车规、外观、风阻、成本方面都难以满足汽车产业的要求。而激光雷达又是
限制L3/L4大规模推广的因素很多,激光雷达也是其中之一。目前最常见360度旋转型激光雷达在车规、外观、风阻、成本方面都难以满足汽车产业的要求。而激光雷达又是无人驾驶必不可缺的传感器。进入2019年,激光雷达的发展方向一是纯固态的Flash激光雷达,二是法雷奥Scala这样的镜子往复运动反射光线的激光雷达。
主流的360度旋转型激光雷达很难过车规,车规包括环境适应性、温度、防尘、防水、震动、冲击、设计寿命、可靠性、一致性、EMC等多个方面,最基础的车规是温度。电子系统的车规没有统一的标准,各厂家都有自己的标准体系,最基础的车规是AEC-Q和TS16949。
要进入车辆领域,打入各一级(Tier1)供应商的供应链,必须取得两张门票,第一张是由北美汽车产业所推的AEC-Q100(IC)、101(离散元件)、200 (被动零件)可靠度标准;第二张门票,则要符合零失效(Zero Defect)的供应链品质管理标准ISO/TS 16949规范(Quality Management System)。
目前AEC-Q100最新的为2014年9月的G版,AEC-Q100最主要是温度测试,分别为最高的0级-温度从零下40度到150度,1级-温度从零下40度到125度,2级从零下40度到105度,3级从零下40度到85度。

上图为最常见的Velodyne的激光雷达产品参数表。运行温度一般都是-10°到+60°。
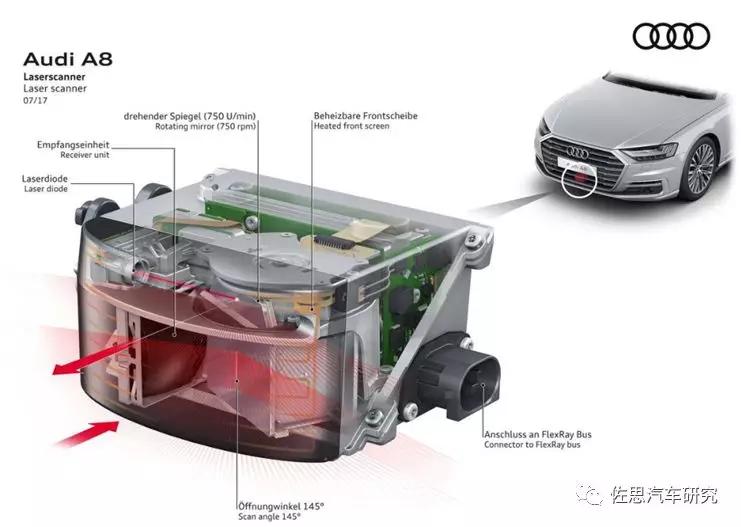
而目前唯一通过车规的Valeo的激光雷达Scala的参数如下:

两者在温度上差别比较大,Scala可以做到-40°到85°。水和尘土安全保护等级上,Velodyne达到IP67,Scala达到IP5K4K\IP9X9K。Scala在防尘上不如Velodyne,但防水等级远超Velodyne的任何产品,达到IPX9K。Scala之所以能过车规,还有两项特殊技能,一是能够主动加热激光雷达前的玻璃,防止起雾。二是具备主动清洗功能。大雪天激光雷达被白雪覆盖、超低温雨水天气下激光雷达被冰冻困扰、高速行驶下蚊虫尸体布满车头等都能解决。
汽车行业牵涉到人的安全,因此研发周期特别长,也必须这样做,汽车行业必须慢一点,必须对生命有足够的敬畏。Scala的车规化历时7年,Scala的原型是2009年就有IBEO LUX,2010年法雷奥与IBEO签署合作协议,拿到IBEO的生产和技术授权,然后花了五年时间将其改造为可量产的车规级传感器,花两年进行了足够的车规验证。2017年正式量产装配在奥迪A8L上,初创公司要做好坐5年以上冷板凳的心理准备。法雷奥是年收入200亿美元的大厂,拥有丰富的汽车传感器经验。

法雷奥在年初也宣布获得4家整车厂5亿欧元的激光雷达订单,这4家可能是现代、奔驰、宝马和奥迪。法雷奥仍然是全球唯一激光雷达量产的厂家,车规的验证和研发周期太长了。
来源:麦姆斯
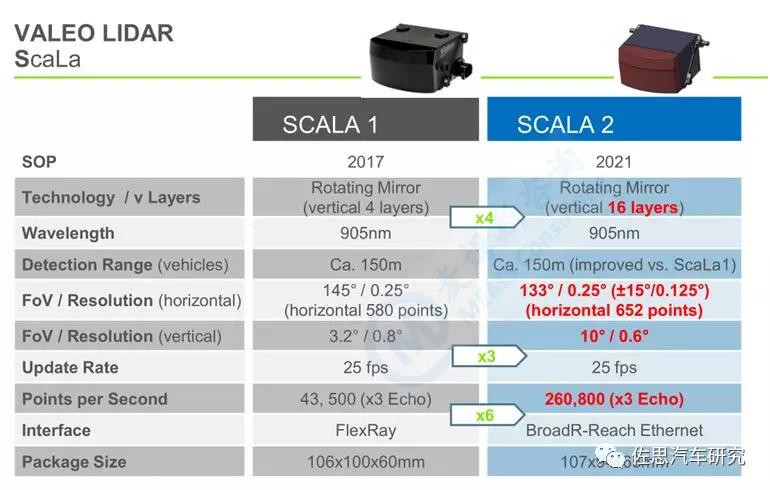
有了第一代的经验,法雷奥的第二代Scala进度比较快,大约在2016年启动第二代研发,预计量产在2021年。与第一代相比,第二代最大的变化是从4线增加到16线,垂直FOV拓宽了3倍,也采用更高传输速率的以太网,点云达到26万点,为保证角分辨率,水平FOV缩窄至133度。
未来激光雷达发展方向是Flash激光雷达和单光子阵列(SPAD)激光雷达。Flash激光雷达无任何转动部件,是真正的纯固态,因此易过车规。体积小,易安装,易融入车的整体外观设计。设计简洁,元件极少,成本低。信号处理电路简单,消耗运算资源少,整体成本低。刷新频率可高达3MHz,是传统摄像头的10万倍,实时性好。缺点是有效距离比较近。
单光子激光雷达拥有Flash激光雷达全部优点,同时采用全半导体,也就是说它就是一片芯片,成本可以大幅度降低到100美元以下,就像是摄像头用的图像传感器芯片。也解决了有效距离,理论上单光子激光雷达做到几公里几十公里的有效探测距离都很轻松。同时还具备超过360度旋转型激光雷达的信噪比。单光子激光雷达实际和手机上热门技术ToF完全一致。可以看做是放大版的ToF。

目前最接近量产的Flash激光雷达是德国大陆汽车的HFL110,刷新频率3MHz,水平FOV为120度,有效距离大约50米,像素为4096点,目前已有样品提供。

再有就是今年9月加拿大Leddartech推出的Leddar Pixell。Leddartech没透露太多参数,看外形,似乎是3个Flash激光雷达合在一起的设计的,FOV能达到180度,安装在汽车四角,像素不高,单个Flash为768像素。
车规级激光雷达鼻祖IBEO,则一步到位推出了单光子激光雷达。IBEO称其为Focal Plane Array焦平面,实际也可归为Flash激光雷达。IBEO加入了VCSEL来控制激光的波束,达到类似机械扫描的效果。VCSEL由AMS提供。福特与大众合资的Argo也在2017年收购了普林斯顿光机所单光子激光雷达小组。有VCSEL加持,单光子激光雷达几乎完美无缺。
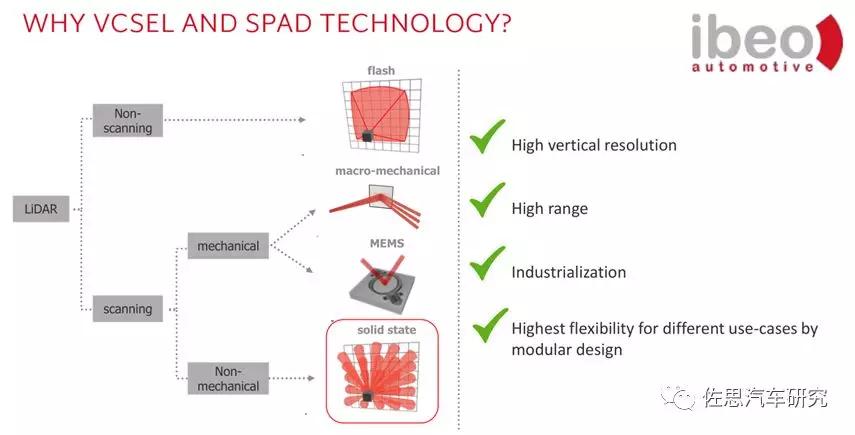
相对微机械和MEMS,IBEO的可靠性和灵活性要高得多,相对无法扫描的Flash激光雷达也有一定优势。

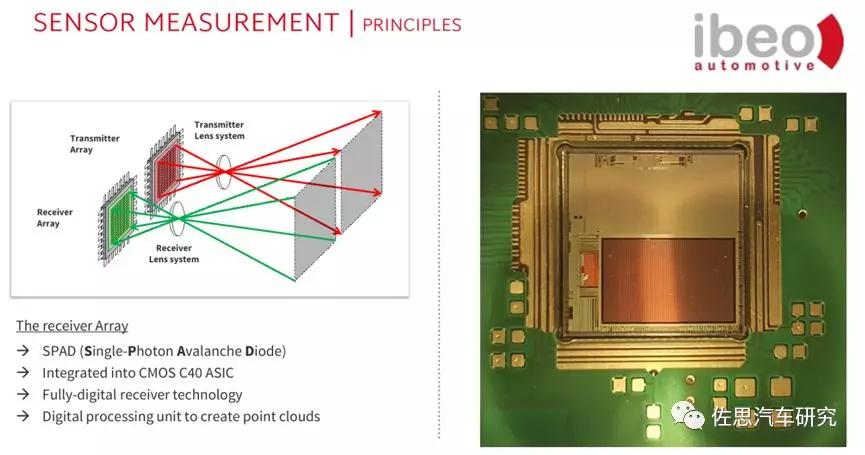
IBEO的单光子激光雷达能输出点云和反射强度信息,部分Flash可能无法输出反射强度信息。
IBEO称之为 ibeonEXT Generic 4D Solid State LiDAR。水平FOV可选择11.2度、60度和120度。称之4D是反射强度信息,反射强度信息近似于传统摄像头的灰度图像,可以用传统的图像识别算法分类。
今年8月27日,长城汽车与德国激光雷达厂商Ibeo 正式签署了激光雷达技术战略合作协议,三方合作的产品基础就是 ibeonEXT Generic 4D Solid State LiDAR。
对于手机ToF传感器大厂来说,进入激光雷达领域只是时间问题。
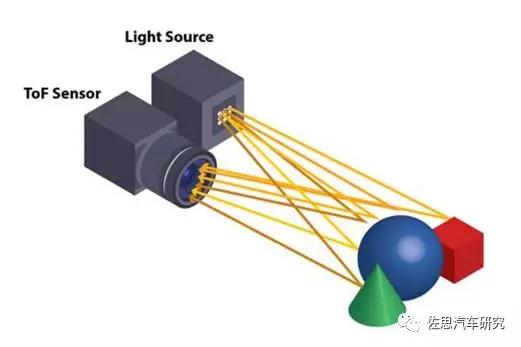
ToF示意图,跟IBEO的单光子激光雷达示意图完全一一样。
像意法半导体、索尼和松下(VIVO使用松下的ToF),他们还拥有晶圆级镜头的能力,可以让激光雷达就是一片芯片大小。VCSEL也是ToF的标配,目前手机的ToF图像传感器有效距离大约在0.3-4.5米之间。

松下进展最为迅速,早在2018年6月,就有目标是车用市场的ToF图像传感器,有效距离有250米,激光雷达实际就是一个3D图像传感器,激光雷达与传统摄像头的区别就是一个接受自然光反射成像,一个主动发射激光成像。只不过激光雷达是全天候,可以获取3D深度信息和反射强度信息,但在分辨率上比传统摄像头要稀疏。
激光雷达是无人驾驶必备的传感器,因为摄像头和毫米波雷达都有其无法突破的缺点需要激光雷达来挽救。对摄像头来说,无论单目还是三目,必须分类(classification)目标障碍物才能检测到目标障碍物,通常也把分类看做识别,也就是说无法识别目标障碍物就无法检测目标障碍物的轮廓信息与位置信息。单目和三目目前的识别方法是典型的穷举法,也就是深度学习,深度学习的认知范围来自其数据集,而数据集是有限的,不可能穷举所有类型,数据集覆盖的范围无论如何都不可能超过真实世界的30%甚至更低。特别在中国,奇形怪状的车辆很多,穿雨衣的骑车人,带各种篷子的电动车,拉农作物或白色垃圾的车,扫地车(特斯拉已经连撞两次扫地车了),洒水车,农用车,消防车等等。真实世界每天都在生成独特样本。只有双目和激光雷达是不识别也可探测。深度学习是一个典型的黑盒子系统,汽车上任何事物都必须具备可解释性和确定性,深度学习并不具备。传统车厂尽量避免在直接有关汽车安全领域使用深度学习,当然,深度学习是识别目标准确度最高的方法,不得不用。
传统的77Ghz毫米波雷达最佳使用场景为ACC和BSD,为了避免地面反射和天桥反射,毫米波雷达都尽量缩小垂直FOV,同时毫米波雷达一般都安装的很低,遇到底盘高的车辆,毫米波雷达穿过车底部,没有反射或反射RCS很小(顺便说下,行人的RCS更小,远远低于车辆),会被当做噪音过滤。沃尔沃上由安波福提供的摄像头雷达一体传感器效果之所以超过大部分ADAS系统就是因为它的雷达安装位置很高,但玻璃会让电磁波大幅度衰减,有效距离缩短。毫米波雷达物体分隔度依赖带宽,目前77Ghz毫米波雷达带宽最高500MHz,物体分隔度为75厘米。再加上多普勒效应在切线方向无效,基本上对于比较窄的目标(低于1.5米),横向移动目标,静止目标,超宽目标,毫米波雷达表现都很差,即使融合传感器,提高程度也很有限,远距离、高底盘车辆、重载车、行人和小目标AEB几乎完全依赖视觉系统。将来毫米波雷达性能能有比较大的提升,但对静止和横向目标依然会很差。 


 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
