




 广告
广告





















































ADAS数据记录面临的挑战—可扩展性和灵活性是传感器数据记录的关键因素
2019-07-16 19:25:59· 来源:Vector维克多

在通向自动驾驶的道路上,驾驶辅助系统承担的任务越多,车上安装的传感器数量就越多。真实的道路交通场景为测试提供了理想的参考数据无穷的场景数据。为此,整车
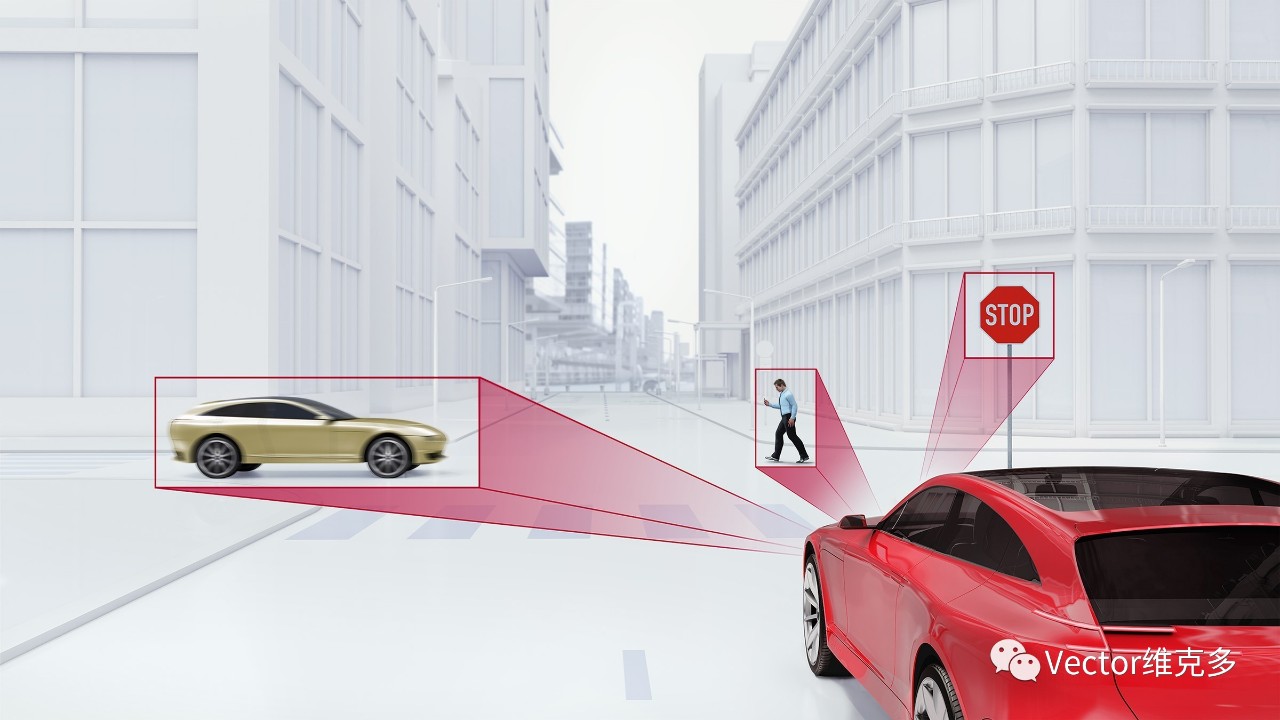
在通向自动驾驶的道路上,驾驶辅助系统承担的任务越多,车上安装的传感器数量就越多。真实的道路交通场景为测试提供了理想的参考数据——无穷的场景数据。为此,整车厂和系统供应商的测试车辆都配备了高端记录仪,进行路试采集数据。记录的数据在实验室中精确地” 重新模拟”交通状况,测试新的或改进的ADAS感知和控制逻辑。我们无需开发大量传感器定制的数据记录系统;相反,我们需要的是可扩展的记录方法和策略。
ADAS系统测试与验证所涉及的工作是巨大的,并且随着自动化程度的提高还在继续增长。自动驾驶的车辆必须能处理任何可以想象的交通场景。根据车辆的用途,测试车队需要行驶多达100万公里,而车辆的持续记录时间则超过2000小时。记录的数据可以重复使用,测试新版软件。在此过程中,具有数千个计算内核的高端服务器被用来缩短重新仿真所需的时间,例如从20,000小时的数据测试时间缩短到三周(500小时)。
没有实车测试的自动驾驶是不可想象的
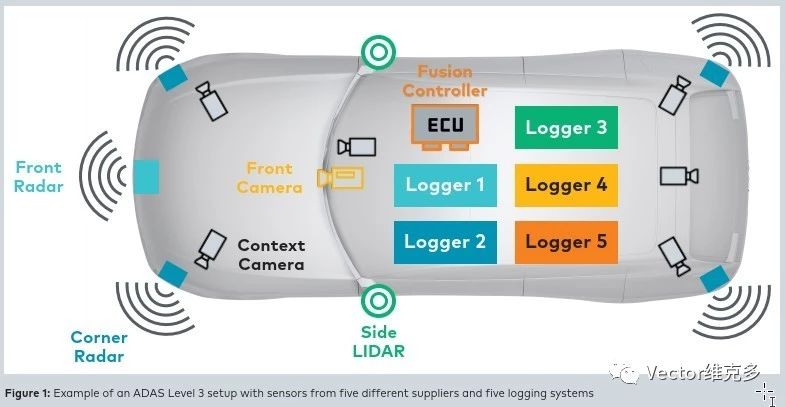
用于记录数据的车辆,需要配备满足其ADAS特定等级的传感器和大量测量技术。主要的传感器类型包含摄像机、毫米波雷达和激光雷达。ADAS系统的核心是融合控制器,它获取所有传感器的数据并实时计算当前环境模型,然后用于控制所有驱动、转向和制动系统。
满足各种传感器、ECU和通信数据记录的高性能记录仪具有兼容汽车等级的RAID存储设备,专为连续运行而设计,具有自动电源管理功能,结合装备精良的车辆,可以测量摄像机、毫米波雷达原始数据,测量融合控制器,附加的参考摄像机视频数据以及提供车辆精确位置的惯性导航系统数据和车载以太网、CAN、CAN FD、FlexRay等众多总线数据。
通常,每个传感器制造商都为其传感器提供专用的记录或调试解决方案。但是,当来自不同制造商的众多传感器组合安装在车辆上时(图1),需要一种通用解决方案,支持所有必要的传感器,并能用统一标准的格式(如ASAM-MDF4)同步存储数据。
所有测量设备的设计必须机械鲁棒且适合汽车环境,并且表现出高可靠性。其它的要求包括:温度范围符合车规级,低功耗、可靠的电源管理。
适用于广泛技术特性的可扩展用户界面
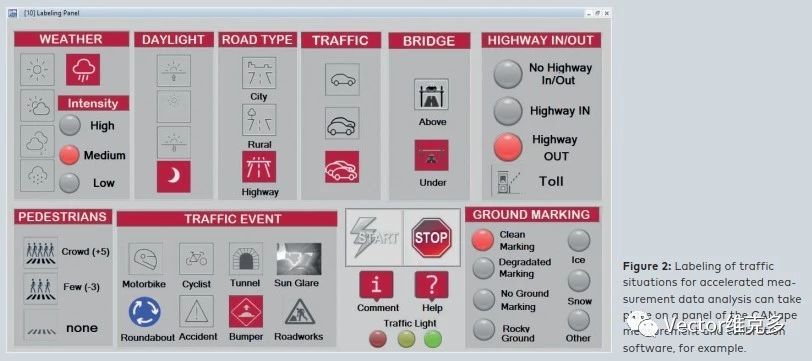
理想情况下,记录软件应提供适应性强的用户界面,用于显示、操作和监控。其界面应满足使用各种配置文件:从智能手机上简单的操作面板到测试期间专家模式下复杂的可视化界面,以及测试后的测量数据分析。对记录数据进行标记以便在以后的工作中更好地利用记录数据(图2),标记可以在车辆行驶期间添加或记录完成后查看测量数据时加上。
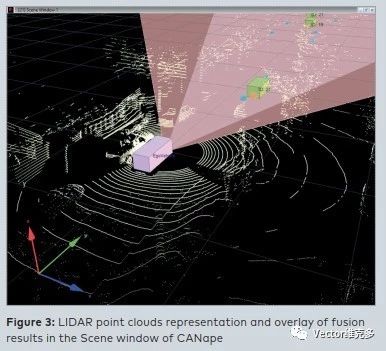
需要各种显示窗口来获取传感器和融合数据有意义的表示形式,包括状态、信号和跟踪窗口、鸟瞰图的目标显示、目标叠加的视频显示、GPS地图显示和3D场景显示窗口(图3)。大多数可视化的需求不需要编程,可以通过图形编辑器轻松配置实现,复杂的显示可以通过编程实现。
每天30TB的记录数据
在车辆中,多数测量模块必须通过1Gb或10Gb的以太网连接到记录仪。等级2的自动驾驶配置以200MByte/s计算,1个工作日的总数据量是6TB;等级3则需要1GByte/s的速度带宽,高达30TB每天。等级4和等级5的记录系统8小时的数据量则超过100TB。
记录的固态硬盘数据无法通过WLAN或移动无线传输,因此需要提供一种简单的方法从车上取下记录的数据。有两种方法可将数据传输到计算中心:在数据量小的情况下,将数据拷贝到多个硬盘然后运送到计算中心是比较经济的方法;在大数据量情况下,则直接将固态硬盘送到计算中心。计算中心具有适应特定存储系统的导入站点,并自动将数据传输到容量为PB的数据服务器。
处理各种传感器的测量设备需求
从根本上说,需要记录的数据类型由传感器决定,这适用于雷达和视频传感器。对于简单的传感器,原始数据可能通过高速视频接口FPD link或GMSL传到融合控制器。这种情况下,传感器的测量需求仅仅包含记录原始数据。
另一方面,智能传感器处理原始数据,通过CAN FD或车载以太网向融合控制器发送目标列表。然而,这些目标列表对于分析或再仿真是不够的。除了原始数据之外,还必须获取微控制器内部数据。通常视频传感器的原始数据速率最高,例如170万像素摄像机的速率是100MByte/s,800万像素摄像机的速率是500MByte/s。由于图像处理算法需要无损压缩,使用无损视频压缩原始数据速率只能降低约40%。然而,视频压缩器会占用测试电脑大量的CPU负载,因此理想的情况是在视频测量硬件设备中实现视频压缩。
一个广泛使用的视频图像处理器是Mobileye的EyeQ芯片,其通过”TAPI协议”和以太网传输的调试数据约每秒几兆字节。TAPI协议对在线评估非常有利,因为开发人员可以立即确认获取的数据是否符合所需的质量标准。车辆中有多达使用10个参考摄像机来获取或监控驾驶的情况。每个摄像机的数据带宽约为60MByte/s,但是使用H.264有损视频压缩,数据量可减少多达50倍,所以这种摄像机的数据速率在记录问题上的权重较小。
雷达传感器和融合控制器的特殊接口支持
当今雷达传感器的原始数据速率约有20MByte/s~80MByte/s,在即将到来的下一代4D成像雷达中,这一速率要乘以一个5~10的系数。此外,还将有多达40MByte/s的调试数据,包括FFT、检测和跟踪的结果。除了原始数据接口,每个雷达芯片通常还有一个Aurora数据调试口,可以通过它以较高的速率读取雷达芯片的数据,且不会对芯片有任何干扰。Aurora接口提供一个路由多核微控制器RAM变更的功能,测量速率可以高达20Gbit/s,在测量设备端会持续产生RAM内存的镜像,且不会对微控制器产生任何负载。从本质上讲,将测量设备集成到雷达传感器上有很大的挑战,因为雷达传感器尺寸很小,理想的情况是将测量设备安装在雷达传感器上。除此之外,不能改变雷达的位置,且输入能量应尽可能低。由于其通常安装在发动机舱中,测量设备必须适应其温度范围和恶劣环境。
融合控制器通常包含一个功能安全ASIL D等级的微控制器和一个或多个用于高性能计算的微处理器。通常,微控制器拥有之前描述的Aurora测量接口。除了以太网接口,微处理器的PCIe接口还可以用于测量非常高速的数据。Aurora和PCIe数据通过共享硬件,实现测量仪器的紧凑设计。
解析供应商定制协议的可扩展测试设备
其它传感器如激光雷达、超声波雷达和惯性测量传感器,通常通过以太网输出原始数据和调试数据。在很多情况下,传感器供应商使用专用协议传输数据。因此,记录仪只保存这些数据是不够的。记录仪必须了解协议或至少部分协议。因此,记录仪软件必须适应传感器。由于传感器的开发处于持续演变的状态,因此通常无法将传感器的协议集成与记录仪软件释放的周期进行协调。DHPR(分布式高性能记录)已被证明在处理这种问题方面非常有效。
已经开发的传感器通过plug-in连接接口到高性能记录模块。DHPR接收传感器数据,并以高效的、时间同步的方式保存。测量标定软件CANape用来控制DHPR(启动、停止、触发)和支持时间同步。此外,DHPR的信号或目标对象从传感器数据中解析出来,然后被路由到CANape软件用于事件触发和复杂显示。由于CANape通过以太网与DHPR进行通信,所以很容易将多台计算机互连形成记录群集,从而形成可扩展的解决方案。
总结和展望
为了满足ADAS传感器记录复杂多样的需求,Vector提供了一种通用的,且经过众多项目验证的解决方案。该方案使用功能强大且广泛使用的CANape软件,并借助DHPR实现对于具体传感器的记录支持。可扩展的VX1000硬件提供可选的ECU接口:从单个基础模块到VX1161紧凑设计的多基础模块,主要用于并行的多个ECU或一个网络上的多个ECU同时测量标定。还有网络接口和以太网交换机,基于BRICK CORE COM的记录电脑和数据复制站,以便快速读取记录的数据。最后,云记录解决方案使用vMDM配置分析测量数据。

根据广大用户的反馈,Vector正在继续开发并改进当前的ADAS记录解决方案。图4为即将推出多测量系统的VX1161模块。VX1161将在一个机箱中集成所有传感器类型的测量设备,减少系统数量,帮助ADAS开发人员减轻布线工作量,加快车辆上测量系统的配置。
未来车载以太网的接口数量和带宽将继续增加。即将推出的VN5240包含12路100/1000base-T1接口,而且其架构是为超过1000base-T1的带宽而设计,很好地满足了带宽增加的需求。VX1161和VN5240都包含2路10Gb的以太网端口,可用于级联测量设备或连接高性能记录仪。
- 下一篇:日本鹭宫制作所 新的驾驶模拟器
- 上一篇:绿驰汽车2019夏季试验正式启动



 广告
广告 



最新资讯
-
使用 HEADlab 测量电流
2026-01-23 17:13
-
奇石乐持续推进全球碳中和战略
2026-01-23 16:47
-
吉利汽车,新公司落户湖北!
2026-01-23 16:12
-
直播|车载光通信技术路线及测试挑战
2026-01-23 13:05
-
重磅!工信部明确新车准入须开展30000km可
2026-01-23 13:05
