




 广告
广告





















































智能汽车测试技术:环境感知系统的测试技术与方法(七、案例四:基于三类感知环境和数据生成模型的认知算法测试)

智能汽车是汽车、电子、信息通信、道路交通运输等行业深度融合的新型产业形态。当前, 我国智能汽车产业进入快车道, 技术创新日益活跃, 新型应用蓬勃发展, 产业规模不断扩大,而相应的测试技术体系也在不断完善, 推动产业进步。本书首先立足于整体现状对智能汽车测试体系架构进行综述, 并针对测试技术的发展趋势和整个核心技术进行详细描述;然后, 针对测试体系中每一测试过程的概念、核心思想、关键技术、测试方法、发展趋势等进行详细描述。
本书可供智能汽车设计人员及测试人员阅读使用, 也可供车辆工程专业及相关专业师生阅读参考。
本文是《智能汽车测试技术》系列文章第七篇(此章完成),前六篇:
智能汽车测试技术:环境感知系统的测试技术与方法(六、案例三:基于虚拟仿真环境的感知系统测试)
智能汽车测试技术:环境感知系统的测试技术与方法(五、案例二:基于虚拟仿真环境的硬件模组测试)
智能汽车测试技术:环境感知系统的测试技术与方法(四、案例一:基于封闭场地环境的感知系统测试)
智能汽车测试技术:环境感知系统的测试技术与方法(三、数据生成模型介绍)
智能汽车测试技术:环境感知系统的测试技术与方法(二、测试技术框架及各类感知环境介绍)
智能汽车测试技术:环境感知系统的测试技术与方法(一、需求分析及系统介绍)
注:本文节选自《智能汽车测试技术》,由机械工业出版社于2025年6月份出版
《智能汽车测试技术》目录
第1 章
导论
1.1 背景与需求/ 001
1.2 基本概念/ 003
1.2.1 测试与评价的基本概念/ 003
1.2.2 产品全生命周期中的测评技术/ 004
1.3 现状与挑战/ 005
1.4 本书章节安排/ 006
第2 章
智能汽车
测评概述
2.1 测评需求分析/ 009
2.1.1 安全性测试与验证/ 009
2.1.2 智能性测试与评价/ 012
2.2 测试方法论/ 015
2.2.1 安全性测试验证框架/ 015
2.2.2 智能性测试评估框架和体系/ 017
2.3 测试工具链及应用要求/ 023
2.3.1 测试工具链/ 023
2.3.2 测试需求与测试工具的适配性/ 027
2.4 本章小结/ 029
参考文献/ 030
第3 章
智能汽车
测试场景
3.1 场景基本概念/ 031
3.2 场景体系/ 033
3.2.1 场景要素与属性/ 033
3.2.2 场景层级/ 035
3.2.3 场景分类/ 036
3.3 场景生成方法/ 037
3.3.1 基于形式化描述的场景生成方法/ 037
3.3.2 基于驾驶员模型的场景生成方法/ 040
3.3.3 安全关键场景生成方法/ 048
3.4 场景采集与利用/ 051
3.4.1 场景采集技术/ 051
3.4.2 场景库搭建/ 052
3.5 本章小结/ 052
参考文献/ 053
第4 章
环境感知
系统的测试
技术与方法
4.1 环境感知系统测试需求分析/ 055
4.2 环境感知系统介绍/ 057
4.2.1 感知系统/ 057
4.2.2 硬件模组/ 058
4.2.3 认知算法/ 058
4.3 环境感知系统测试技术框架/ 059
4.4 各类感知环境介绍/ 060
4.4.1 封闭场地环境/ 060
4.4.2 道路交通环境/ 064
4.4.3 虚拟仿真环境/ 066
4.5 数据生成模型介绍/ 069
4.5.1 降雨图像生成方法概述/ 070
4.5.2 降雨图像生成模型介绍/ 071
4.5.3 降雨图像生成模型结果/ 075
4.6 具体测试案例/ 076
4.6.1 案例一:基于封闭场地环境的感知系统测试/ 076
4.6.2 案例二:基于虚拟仿真环境的硬件模组测试/ 078
4.6.3 案例三:基于虚拟仿真环境的感知系统测试/ 081
4.6.4 案例四:基于三类感知环境和数据生成模型的
认知算法测试/ 083
4.7 本章小结/ 086
参考文献/ 087
第5 章
决策规划
系统的测试
技术与方法
5.1 决策规划系统的测试需求与挑战/ 089
5.1.1 测试需求/ 089
5.1.2 测试挑战/ 090
5.2 基于场景的测试技术与方法/ 092
5.2.1 静态试验设计测试方法/ 092
5.2.2 动态试验设计测试方法/ 094
5.3 基于真实里程的测试技术与方法/ 101
5.3.1 开放道路测试技术/ 101
5.3.2 重要度采样加速测试方法/ 103
5.4 基于虚拟里程的测试技术与方法/ 104
5.4.1 虚拟里程测试系统组成框架/ 105
5.4.2 用于虚拟里程测试的NPC 模型生成方法/ 106
5.4.3 用于虚拟里程测试的NPC 模型性能验证/ 113
5.4.4 虚拟里程测试的应用/ 118
5.4.5 小结/ 130
5.5 其他测试技术/ 131
5.5.1 自动化测试技术/ 131
5.5.2 错误注入测试技术/ 139
5.5.3 分布式自动化测试技术/ 152
5.6 本章小结/ 157
参考文献/ 157
第6 章
整车测试
技术与方法
6.1 整车测评需求分析/ 159
6.2 封闭测试场地平台/ 160
6.2.1 封闭测试场/ 160
6.2.2 动态模拟目标物系统/ 162
6.2.3 定位与数据采集系统/ 163
6.3 开放道路测试系统/ 164
6.3.1 测试方案制定/ 165
6.3.2 数据采集与数据闭环系统/ 165
6.4 本章小结/ 166
第7 章
智能汽车
安全性评估
7.1 基于具体场景的安全性评估/ 169
7.1.1 场景瞬时风险评估方法/ 170
7.1.2 多阶段安全评估/ 180
7.1.3 单个测试场景结果外推/ 181
7.2 基于逻辑场景的安全性评估/ 182
7.2.1 评估要求/ 182
7.2.2 面向逻辑场景评价的危险域识别方法/ 183
7.3 针对被测功能的安全性评估/ 192
7.4 本章小结/ 192
参考文献/ 193
第8 章
智能汽车
综合行驶
性能评估
8.1 测评需求与研究现状/ 195
8.1.1 测评需求/ 195
8.1.2 研究现状/ 195
8.2 测评基本流程/ 197
8.3 典型测试场景矩阵/ 198
8.4 测试方法与流程/ 199
8.4.1 测试方案/ 199
8.4.2 背景车跟驰模型/ 199
8.4.3 测试数据输出/ 201
8.5 评价方法与流程/ 202
8.5.1 评价体系/ 202
8.5.2 评价流程/ 204
8.6 测评示例/ 206
8.7 本章小结/ 209
参考文献/ 209
附 录
附录A 测试工况参数设置/ 210
附录B 背景车跟驰模型/ 212
附录C 归一化方法/ 214
附录D 常见缩写词/ 216
4.6.4 案例四:基于三类感知环境和数据生成模型的认知算法测试
本案例的测试技术框架对应图4-44中序号④、⑤、⑦和⑧的连线。由于算法的输入通常较为独立,一般没有前序相关设备的限制,即单独输入图像或视频即可,各种待测感知数据获取方法均可以满足测试要求。在本案例中共包含四种待测感知数据获取方法,经由数据采集系统分别从道路交通环境和封闭场地环境中获取待测感知数据、经由虚拟传感器模型从虚拟仿真环境中获取待测感知数据、经由数据输出模型直接获取待测感知数据。被测对象为YOLOv5算法,检测目标为降雨条件对检测结果的影响。测试流程如下。
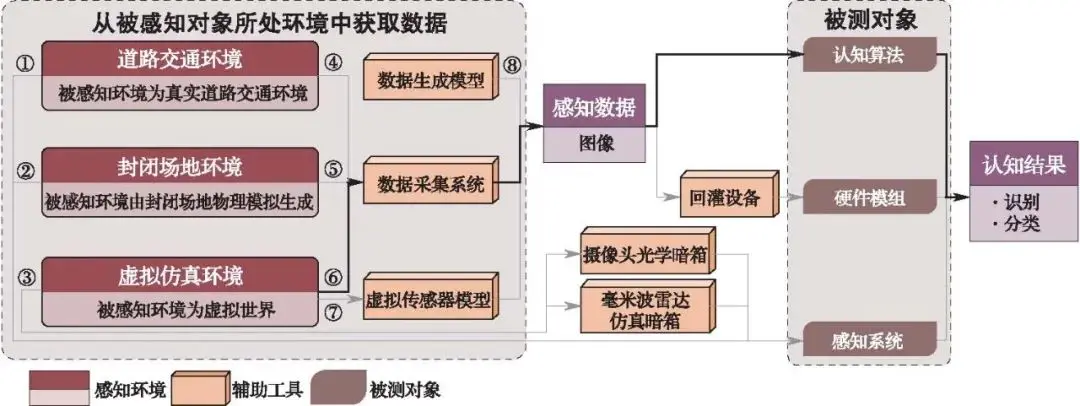
图4 -44 基于三类感知环境和数据生成模型的认知算法测试技术框架
(1)待测数据生成
选取降雨作为触发条件,选取行人作为预期感知目标设计静态场景,场景中行人目标距视觉传感器纵向距离20m。
从道路交通环境中使用车载摄像头采集真实道路数据。根据实时天气预报的小中大三级降雨,分别采集各级降雨及晴天条件下的原始感知图像,对摄像头输出的原始感知图像进行中心裁剪预处理,裁剪图像尺寸为1080×700,最终结果如图4-45所示。

图4-45 路采数据生成降雨
封闭场地环境位于上海某封闭测试场,测试道路右侧设置有500m长降雨模拟设备。该降雨模拟设施共设有6个降雨等级,从0级到5级分别对应无雨、小雨、中雨、大雨、暴雨、大暴雨。基于该降雨模拟设备,控制视觉传感器采集晴天和不同降雨强度下的图像,采集时长大于5s。为保证降雨水平稳定,每次调整降雨模拟设备的降雨量后,需等待至少5min后再进行数据采集。为保证各类生成方法的图像大小一致,对摄像头输出的原始感知图像进行中心裁剪预处理,裁剪图像尺寸为1080×700,最终结果如图4-46所示。

图4-46 封闭场地生成降雨
使用仿真软件搭建测试场景,并利用软件中的虚拟传感器模型采集虚拟仿真环境中的待测感知数据。首先选取合适的地图和视觉传感器模型,同时控制场景中的天气条件变量(如雨量、云量、地面干湿度等)得到不同等级降雨,最后得到摄像头表面有水渍和无水渍两类场景,同样对摄像头输出的原始感知图像进行中心裁剪预处理,裁剪图像尺寸为1080×700,两类场景的结果分别如图4-47和图4-48所示。

图4-47 虚拟仿真生成降雨(无水渍)
图4-48 虚拟仿真生成降雨(有水渍)
选取本章介绍的基于生成对抗网络构建的分级降雨图像生成模型RCCycleGAN,获取各级降雨图像,最终结果如图4-49所示。

图4-49 生成模型模拟降雨
(2) 输出测试结果
将上述各方法生成的降雨图像输入至目标识别算法YOLOv5 中, 以漏检率和分类置信度为评价指标, 计算不同等级降雨的评价指标数值。经过测试, 对于行人目标物, 各类生成方法得到的降雨图像均未导致漏检现象出现。分类置信度方面, 以封闭场地物理模拟降雨为例, 其分类置信度(CC) 的结果如图4 -50所示。基于不同生成方法结果的对比和分析, 可以横向比较各种生成方法的效果。
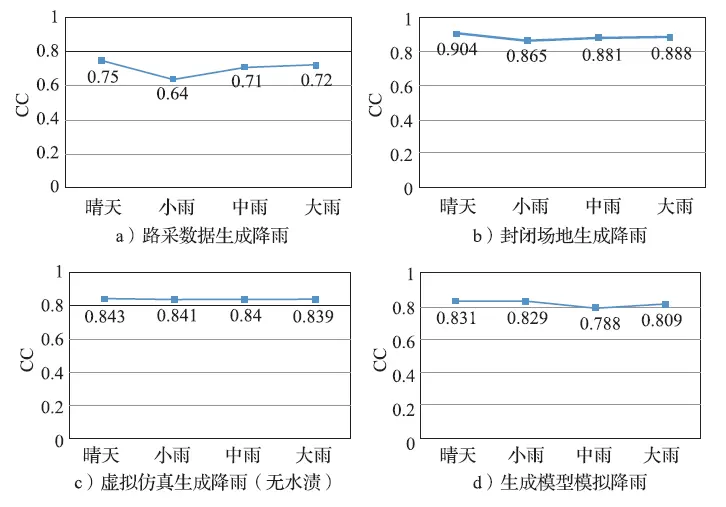
图4 -50 不同降雨生成方法的分类置信度结果
4. 7 本章小结
本章从环境感知系统的测试需求出发, 首先说明了环境感知系统测试对智能汽车安全的必要性; 然后对三类不同被测对象的感知系统、硬件模组和认知算法进行了介绍; 随后提出了针对前向环境感知系统测试的技术框架, 基于不同的感知环境并辅以相关辅助工具, 同时选取合适的被测对象进行组合, 即可得到多种的测试方法; 接着对三类感知环境和数据生成模型依次进行了详细说明和介绍;最后结合具体的测试案例, 对本章所提出的环境感知系统各测试方法加以详细说明。
参考文献
[1]RENS,HEK,GIRSHICKR,etal.FasterR⁃CNN:Towardsreal⁃timeobjectdetectionwithregionproposalnetworks[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2017,39(6):1137-1149.
[2]LIUW,ANGUELOVD,ERHAND,etal.SSD:Singleshotmultiboxdetector[C]//EuropeanConferenceonComputerVision.Cham:Springer,2016:21-37.
[3]REDMONJ,DIVVALAS,GIRSHICKR,etal.Youonlylookonce:Unified,real⁃timeobjectdetection
[C]//ProceedingsoftheIEEEConferenceonComputerVisionandPatternRecognition.NewYork:IEEE,2016:779-788.
[4]GIRSHICKR,DONAHUEJ,DARRELLT,etal.Richfeaturehierarchiesforaccurateobjectdetectionandsemanticsegmentation[C]//ProceedingsoftheIEEEConferenceonComputerVisionandPatternRecognition.NewYork:IEEE,2014:580-587.
[5]GIRSHICKR.FastR⁃CNN[C]//ProceedingsoftheIEEEInternationalConferenceonComputerVision.NewYork:IEEE,2015:1440-1448.
[6]BOCHINSKIE,EISELEINV,SIKORAT.High⁃speedtracking⁃by⁃detectionwithoutusingimageinformation[C]//201714thIEEEInternationalConferenceonAdvancedVideoandSignalbasedSurveillance(AVSS).NewYork:IEEE,2017:1-6.
[7]ZHANGY,SUNP,JIANGY,etal.Bytetrack:Multi⁃objecttrackingbyassociatingeverydetectionbox
[C]//ComputerVision⁃ECCV2022.Cham:SpringerCham,2022:1-21.
[8]AHARONN,ORFAIGR,BOBROVSKYBZ.BoT⁃SORT:Robustassociationsmulti⁃pedestriantracking[J].arXivpreprintarXiv:2206.14651,2022.
[9]BRIEFSU.Mcitygrandopening[J].ResearchReview,2015,46(3):1-2.
[10]JACOBSONJ,JANEVIKP,WALLINP.ChallengesincreatingAstaZero,theactivesafetytestarea
[C]//TransportResearchArena(TRA)5thConference:TransportSolutionsfromResearchtoDeployment.Paris:[s.n.],2014.
[11]GIBSONT.Virginia
- 下一篇:汽车保险杠对行人下肢保护的关键技术与测试方法
- 上一篇:丰田宣布,给供应商加钱



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
