




 广告
广告





















































基于自然驾驶场景的驾驶员主观风险认知数据集
2025-05-10 12:58:35· 来源:同济智能汽车研究所

计算了各场景主客观行驶风险之间的Spearman相关系数,结果如图9所示。从显著性看(p<0.001),各指标间均在统计学层面上存在显著相关性。
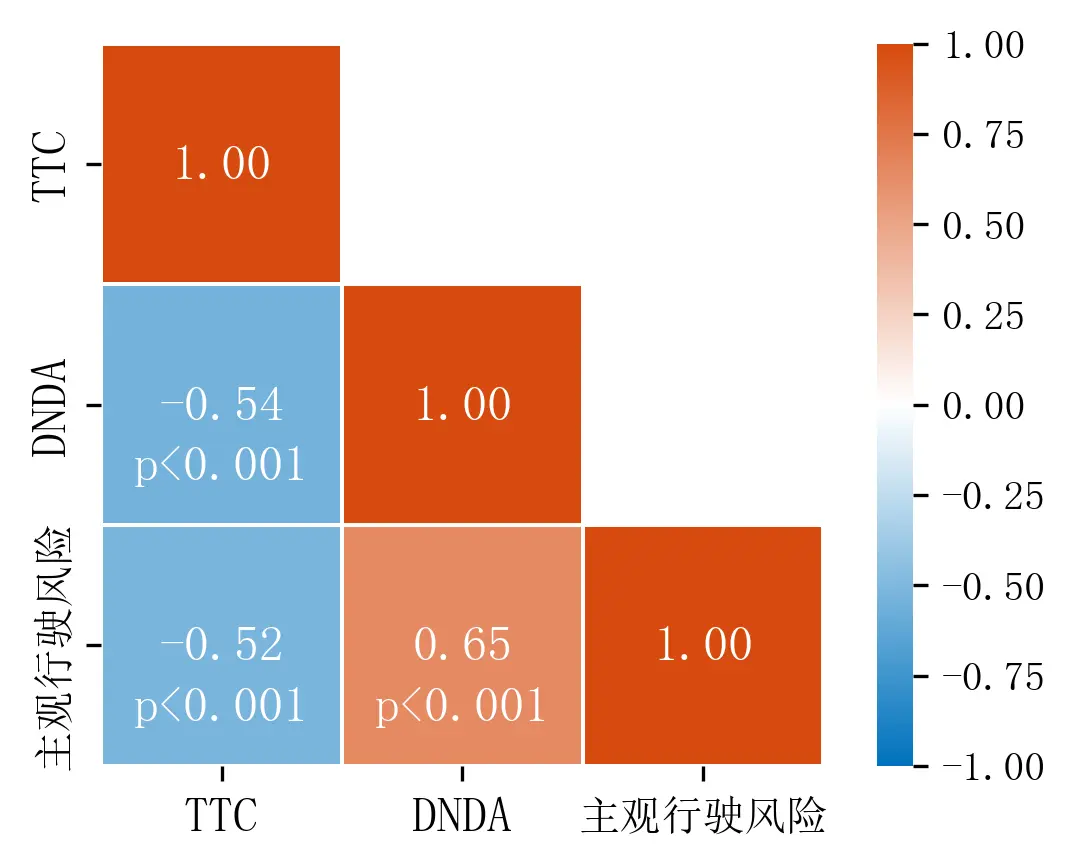
然而,从相关系数看,TTC与主观行驶风险为中等程度的负相关关系(r=-0.52);DNDA与主观行驶风险为中等程度的正相关关系(r=0.65)。这表明主客观风险之间的线性相关程度不高,再次证明驾驶员主观风险认知的不可替代性和采集人类认知信息的必要性。
图9 主客观行驶风险的相关性分析
4、示例:驾驶员眼动特征分析
基于RISEE数据集所提供的眼动信息,分析了驾驶员在不同风险认知状态下的眼动特征,以深入探索其风险认知模式。具体来说,首先结合主客观风险识别驾驶员的风险认知状态,再分析其平均瞳孔直径、注视频率和扫视频率等眼动指标在不同风险认知状态下的差异性。其中,风险认知状态定义如图10所示。
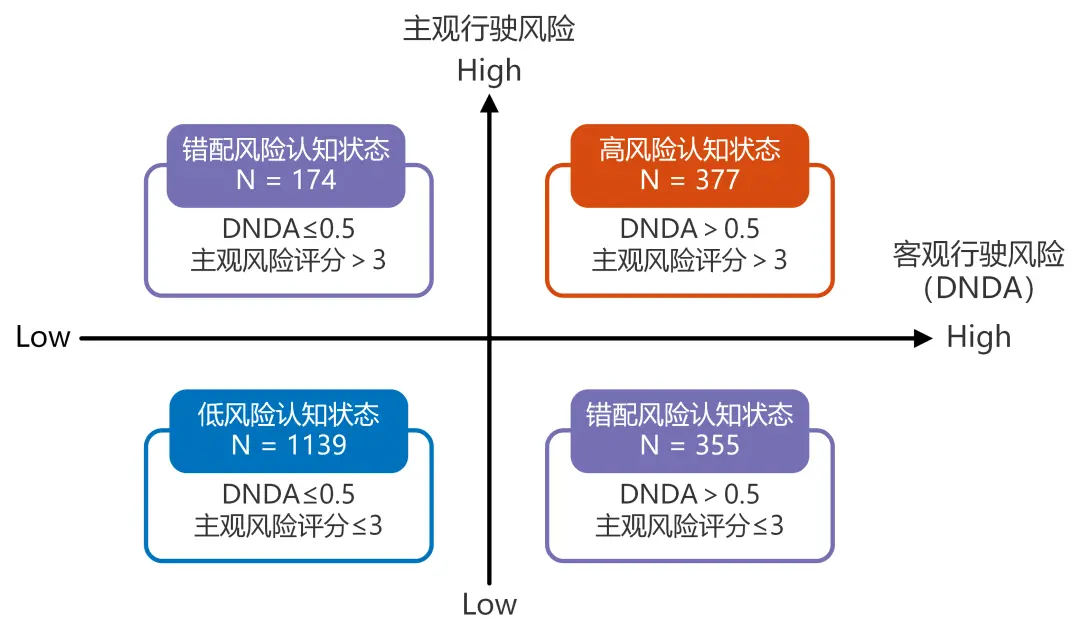
图10 驾驶员风险认知状态定义(N=2045)
参考上述定义,采用Mann-Whitney检验,计算对应高低风险认知状态下各眼动指标的差异性,结果如表2所示。
- 下一篇:多传感器注入HIL仿真系统用户案例
- 上一篇:斯堪尼亚探索增程式混动卡车应用前景



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
