




 广告
广告





















































车内噪声主动控制的参考信号选取方法

[摘要] 主动噪声控制是降低车内噪声的重要手段。本文利用前馈自适应主动噪声控制算法,对车内后排乘客处稳态工况下发动机噪声进行控制。分别选取声音、振动、发动机转速三种信号作为前馈系统的参考信号,定量分析了控制点处不同类型参考信号对降噪量、降噪频带和收敛速度三方面降噪性能的影响。实验结果表明,三种参考信号在降噪性能上各有优劣,实际应用中应根据针对的问题对参考信号进行合理选择。
关键词:汽车主动噪声控制,前馈控制,参考信号
1 引言
主动噪声控制(ANC)由德国的物理学家Lueg [1]在上世纪 30 年代以专利的形式提出,其降噪机理是两列等幅反相声波的相干相消。该理论自产生以来,在诸多应用领域进行了积极的实践,包括变压器[2],核磁共振设备[3],降噪耳机[4]以及汽车[5]等。其中车内主动噪声控制已成为汽车厂商为提高整车 NVH 性能的一项优势技术。汽车车内以低频噪声为主,若通过增加吸声材料和隔声材料实现被动噪声控制,必将增加额外的重量,和轻量化的设计理念相违背。主动噪声控制技术对于声源位置确定、宽带低频的汽车车内噪声的控制十分有效。发动机是汽车车内噪声的主要声源,尤其在路噪和风噪不明显的工况下,能否有效地降低车内发动机噪声对于整个车舱内的噪声水平的降低十分关键。第一辆搭配主动噪声控制系统的量产车型就是主要针2 对发动机“嗡嗡声”[6]。
主动噪声控制技术根据是否需要参考信号可分为前馈控制系统和反馈控制系统。前馈控制系统在系统稳定性和降噪频带宽度等方面优于反馈系统。前馈自适应控制的主要机理是利用先于误差点处得到初级声源的参考信号与自适应滤波器权值系数计算次级声源激励信号,同时根据实时反馈的误差信号使用最速下降等方法更新自适应滤波器系数,以使自适应滤波器系数不断趋近于最优解。由于发动机噪声参考信号容易获取,噪声成分相对简单且处于低频段,因此前馈主动噪声控制技术是控制发动机噪声的较好选择。
前馈自适应主动噪声控制能够达到怎样的降噪性能跟参考信号紧密相关,要求参考信号能够有效提取,参考信号和误差点处的初级噪声信号有很好的相关性,且参考信号不会被次级源所干扰。目前常用的参考信号主要有两种形式[7],一类是声信号,另一类是非声信号。声信号能够直接包含初级声源的所有信息,但是受外界环境影响较大,尤其是存在着次级声反馈的场合。许多国内外学者的研究都采用声信号作为参考信号,考虑到次级声反馈的影响,或采用Filter-U 算法[8]消除其影响,或在控制框图中加入次级声反馈通道[9]并采用现代控制理论设计控制滤波器。非声信号可采用噪声源振动信号,发动机的振动信号能很好的反映发动机的主要阶次噪声,但是振动传感器成本很高,且高阶噪声成分不明显,因此通常只在降低路噪的应用中才会考虑使用振动信号作为参考信号[10];对于做周期旋转运动的声源,可以采用其同步转速信号作为参考,转速信号与各阶次频率有着固定的对应关系,但是使用传统的前馈自适应算法很难直接利用转速信号作为参考信号,因为不同负载下即便相同的转速车内噪声的幅值可能相差很大,因此可采用自适应噪声均衡算法或自适应陷波器利用转速信号构造参考信号进行控制。
国内外学者对不同参考信号对于汽车车内发动机噪声降噪效果的研究还比较少,且大多是定性的分析。因此本文将以后排乘客位置作为局部控制点对发动机稳态噪声进行实时控制,定量分析不同参考信号对降噪量、降噪频带宽度和收敛速度等降噪性能的影响。
2 主动噪声控制和主动噪声均衡算法
前馈自适应控制最常用的控制算法是Burgess[11]提出的 Filter-x LMS 算法,算法框图如图1 所示。
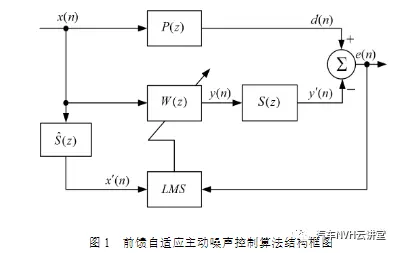
图中, 是n时刻的初级噪声信号序列即参考信号序列,自适应滤波器系数序列为
是n时刻的初级噪声信号序列即参考信号序列,自适应滤波器系数序列为 ,其中L是自适应滤波器的阶数。P(z)是初级通道传递函数,S(z)是次级通道传递函数, S ˆ(z)是次级通道传递函数的估计,
,其中L是自适应滤波器的阶数。P(z)是初级通道传递函数,S(z)是次级通道传递函数, S ˆ(z)是次级通道传递函数的估计, 是S(z)的脉冲响应序列,
是S(z)的脉冲响应序列,  是S ˆ(z)的脉冲响应序列,N是次级通道传递函数估计的阶数。y(n)是次级扬声器激励信号。参考信号序列经过次级通道传递函数估计的滤波后,可得到滤波参考信号
是S ˆ(z)的脉冲响应序列,N是次级通道传递函数估计的阶数。y(n)是次级扬声器激励信号。参考信号序列经过次级通道传递函数估计的滤波后,可得到滤波参考信号 。滤波参考信号()nr和误差信号e(n)同时用于更新滤波器的系数,误差信号()en是由误差传感器采集到的初级声场成分d(n)和次级声场成分y(n)叠加而成的。前馈自适应控制方程如式(1)所示:
。滤波参考信号()nr和误差信号e(n)同时用于更新滤波器的系数,误差信号()en是由误差传感器采集到的初级声场成分d(n)和次级声场成分y(n)叠加而成的。前馈自适应控制方程如式(1)所示:

若误差信号(en) 0,则有最优自适应滤波器为 ,因此控制的结果相当于求解最优滤波器使得此滤波器能够综合初级噪声通道和次级通道的信息。为此,1985年Widrow [12]等提出LMS算法通过最速下降法不断迭代求得维纳最优解。即取目标函数相对于权值系数的负梯度方向更新权值系数,如式(2)所示:
,因此控制的结果相当于求解最优滤波器使得此滤波器能够综合初级噪声通道和次级通道的信息。为此,1985年Widrow [12]等提出LMS算法通过最速下降法不断迭代求得维纳最优解。即取目标函数相对于权值系数的负梯度方向更新权值系数,如式(2)所示:

其中J为控制的目标函数,取,实际应用中以误差信号的瞬时平方值J=e2代替误差信号的平方期望值,则有式(3):
综合(1)和(3)可得自适应滤波器权值系数迭代的一般公式为(4):

式中是步长因子。对于Fx-LMS算法,步长因子的上限受到参考信号强度、自适应滤波器阶数和次级通道延迟的影响。参考信号强度越大,自适应滤波器阶数越大,次级通道延迟越大,则可取的不使算法发散的最大步长因子max越小。自适应均衡算法最早由Kuo[13]提出。算法框图如图2所示。图中符号延续了图1中的意义。不同之处在于,自适应均衡算法需要两个正交的余弦参考信号。次级信号分为两个分支,一个分支称为消除分支,次级信号乘以一个增益1-β后作为扬声器激励信号;另一个分支称为平衡分支,次级信号乘以增益因子β后经过次级通道估计函数滤波,与实际误差信号一起构造成伪误差信号。自适应滤波器权值系数通过两个参考信号和伪误差信号进行更新。
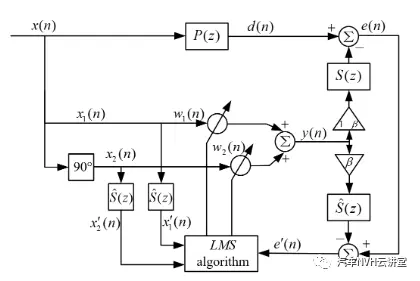
图2 前馈自适应主动噪声均衡算法结构框
自适应均衡算法控制方程为式(5):

通过分析可得在次级通道建模误差为0的条件下,误差信号与初级噪声信号有如式(6)的关系:

因此可通控制增益因子的数值来控制误差信号的大小。根据的取值,系统可有四种控制模式:

该系统参考信号可由发动机转速信号直接构造。由于增益因子的存在,该方法可用于阶次噪声的均衡控制,从而改善车内的声品质。
3 汽车主动噪声实时控制系统
3.1实验系统搭建
为研究参考信号对前馈主动噪声控制系统的影响,在消声室内搭建了基于汽车后排乘客左耳位置的局部有源噪声控制平台。系统如图3所示,图3中左图是试验车辆和试验环境,右图即是控制系统。该系统由两个误差传声器和两个次级扬声器组成,每个误差传声器和次级扬声器组成一个通道,次级扬声器的功放布置在车外。

试验中将三种不同的参考信号提供给控制器。第一种以传声器信号为参考信号,布置在发动机舱内,这样可有效避免次级声反馈的影响。但是会降低参考信号和到达误差点处的初级信号之间的相关性,因为有些频率的噪声经过初级通道会被削弱。第二种参考信号布置在发动机悬置主动端,取z向的振动信号作为参考,该种布置参考信号强度远大于声信号,对于前馈系统来说,步长因子的上限值会减小,且参考信号一般只包含二阶成分。第三种参考信号从汽车OBD接口读取模拟发动机转速信号构造二阶频率的余弦信号,控制模型使用主动噪声均衡模型,取增益因子 。
。
3.2 次级通道辨识
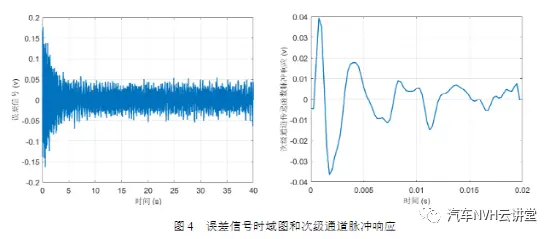
主动噪声控制和主动噪声均衡算法中对于参考信号都有次级通道估计函数滤波处理,该处理是为了使参考信号和误差信号在时间轴上对齐,从而增加算法的稳定性。因此次级通道辨识是至关重要的环节。次级通道建模误差的大小会影响系统的稳定性,研究表明[14],只要次级通道估计函数与实际的物理通道的相频响应之间的误差小于90°,系统就能有降噪的效果。次级通道建模通常有离线建模和在线建模两种方式。离线建模即在没有初级噪声的环境下,给次级扬声器以白噪声激励,同时测得传声器的响应来求取由激励电信号到响应电信号之间的传递函数。在线建模需要在控制的过程中一直施加白噪声激励,控制自适应滤波器不断更新的同时,次级通道传递函数也不断修正,该方法对于次级通道时变的场合能够有效地控制建模误差,但同时会引入白噪声使得信噪比降低,且算法的复杂度也会提高。本试验中试验车辆在消声室内静态加速,次级通道传递函数在整个控制过程中变化不大,因此本文采用离线自适应建模的方法对次级通道传递函数进行估计。图4是次级通道自适应辨识过程中误差信号的时域图和辨识出的次级通道脉冲响应,此处的误差信号是指期望信号与自适应滤波器输出之间的误差,与下文控制过程中误差传声器拾取的误差信号有所区别。次级通道长度取80阶,步长因子为0.0001,由图可见,误差信号在5s内即趋于收敛。
3.3 降噪效果分析本文试验车辆为某款国产紧凑型车,搭载四缸涡轮增压发动机。试验选择发动机转速为3000r/min的稳态工况。对于四缸四冲程发动机,其噪声峰值主要在阶次频率处,其中二阶频率处会取得最大值。此频率约为100Hz。试验选择后排乘客左耳位置处为降噪点,图6~9中的误差信号都是指期望降噪点处的误差传声器拾取的初级声场和次级声场之间的误差值。图5是不施加控制时降噪点处原始噪声信号的时频图。
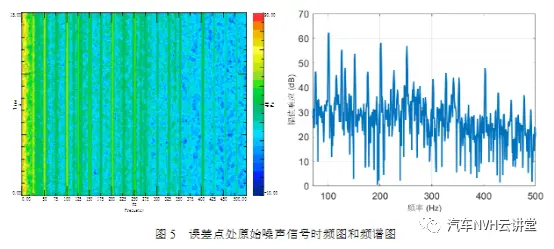
由图5原始信号的时频图和频谱图可见,阶次噪声和半阶次噪声十分显著,部分频段出现明显的共振现象。
图6为以发动机舱传声器信号作为控制系统参考信号时,降噪点处采集到的误差信号的时频图以及参考信号的时频图。控制滤波器阶数选择为200阶,步长因子为0.05。由图可见,与原始噪声信号时频图对比,70-500Hz处主要阶次噪声和半阶次噪声都得到了有效的控制,降噪频带宽度较宽。这种控制效果主要是由于参考信号的时频图中也含有相应噪声成分,因此降噪频带体现出宽带的特性。该种参考信号下由于声信号的强度弱,相对收敛时间比较长。
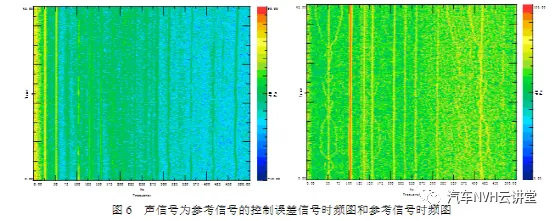
图7是以发动机悬置主动端振动信号作为控制系统参考信号时,降噪点处采集到的误差信号的时频图以及参考信号的时频图。控制滤波器阶数选择为200阶,步长因子为0.05。明显可看出,该参考信号下只有二阶降噪效果显著,这是由于对于振动参考信号,其几乎只反应发动机的二阶频率成分,因此控制只在该频率有效,其他频段降噪效果不大,且由于振动参考信号信噪比较低,在某些频率处还产生了额外的噪声。振动信号强度较大,所以误差信号相对于声信号为参考收敛较快,但另一方面又会限制步长因子的上限值。
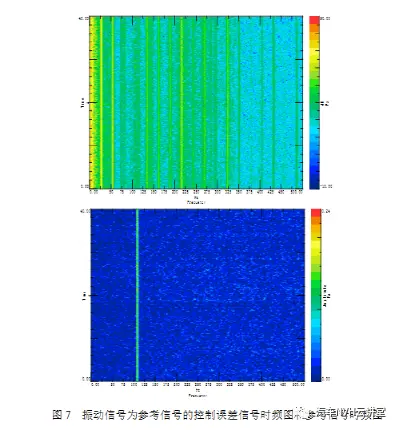
图8是以发动机转速信号作为控制系统参考信号时,采用自适应噪声均衡方法降噪点处采集到的误差信号的时频图。步长因子为0.01。本例中只对二阶频率进行了参考信号的构造。相较于其他两种参考信号控制结果,该方法收敛速度最快,噪声二阶频率成分降噪量最大,在该频率点处几乎能够完全消除。但是由于要想利用该种方法控制多频成分,必须搭建并联系统,这样不可避免会增加算法复杂度。
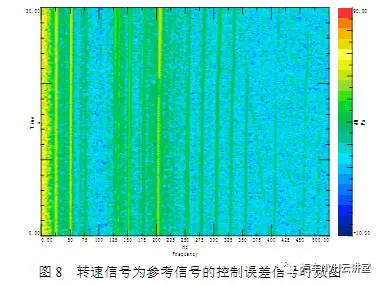
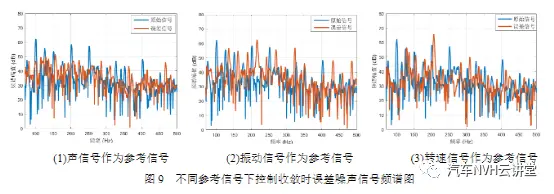
图9为不同参考信号下控制系统收敛后,取1s的控制点误差信号与原始噪声信号频谱的对比结果图。可以得出如下结果:选取声音作参考信号时,70-500Hz频段峰值处均有所衰减,总降噪量达到4.35dB,二阶次噪声降噪量达到12dB;选取振动信号作参考信号时,二阶次噪声有明显降低,降噪量达到16dB,但降噪频带宽度只为70-125Hz,此频带内降噪量可达到8.11dB,某些频率处噪声甚至会增加;选取发动机转速信号作参考信号时,在降噪频带宽度70-125Hz内降噪量可达14.05dB, 二阶次噪声降噪量可达30dB,噪声其他频率成分基本保持不变。
4 结论
前馈主动噪声控制系统参考信号的选取直接影响降噪量、降噪频段和收敛速度等降噪性能。本文研究了发动机舱声音信号、发动机悬置主动端振动信号以及发动机转速信号三种不同参考信号对汽车车内噪声的控制效果的影响。不同类型的参考信号各有其优缺点,适用于不同场合。
1.以声音信号作为参考信号时,其降噪频带范围最大,适合控制车内噪声的总声压级,可在宽带低频段达到3-5dB降噪量,但其收敛速度较慢,且需要合理选择参考信号位置,避免次级声反馈带来的影响。
2. 以发动机悬置主动端振动信号作为参考信号时,由于其二阶能量所占比重最大,因此二阶次噪声降噪效果明显,在窄带内可达5-10dB降噪量,收敛速度优于声音参考信号。同时,由于加速度信号与控制点信号在阶次频率外相关性较差,因此在其他频率处可能会产生噪声增加的情况。
3. 以发动机转速信号作为参考信号时,误差信号收敛速度最快,参考频率噪声成分降噪量最大,窄带内可以达到10-15dB降噪量。但其控制频率有限,适用于调节阶次在总声压级中所占比重,改善汽车车内声品质。
作者:王宇1, 齐松明2,韩强2,郑四发11
作者单位:清华大学汽车系,2清华大学苏州汽车研究院(相城)
来源:2017年汽车NVH控制技术研讨会论文集
- 下一篇:汽车线束EMC 设计基本原则
- 上一篇:一文深度解析「汽车电子域控-中央控制进化」



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
