




 广告
广告





















































CNCAP2024的那些个极端场景测试,车路协同能带来多大助力呢?

C-V2X技术作为车辆通信的新一代标准,有望成为解决更多极端场景和corner case的下一个突破口。CNCAP2024作为最新要求的测试场景通常涵盖了各种交通情况和驾驶场景,其中一些场景可能需要车路协同技术的支持来更好地解决。以CNCAP中最新要求的测试场景来分析下车路协同能够怎样助力解决这些要求的测试场景呢?让我们以几个常见的测试场景为例,分析车路协同如何助力解决这些要求。
1、车辆静止障碍物碰撞测试:
场景1:车辆行驶过程中突遇静止障碍物(例如停在路中间的车辆),需要进行紧急制动以避免碰撞。
C-V2X解决方案:
首先,车辆通过车载摄像头和雷达感知系统检测到行人冲出的情况。然而,在某些情况下,行人可能突然出现在盲区内,智能车路协同系统可以通过路边传感器或其他车辆上传的信息来补充环境感知数据,帮助车辆更全面地掌握路况情况。
其次,通过与城市交通管理中心的通信,车辆可以获得关于道路工程或临时交通限制的信息,避免进入可能存在危险的区域。
最后,通过车路协同,道路基础设施可以向周围车辆发送警报信息,提前预警静止障碍物的存在。同时,车辆可以收到道路基础设施发送的信息,并在发现障碍物时采取紧急制动等措施,从而避免碰撞。
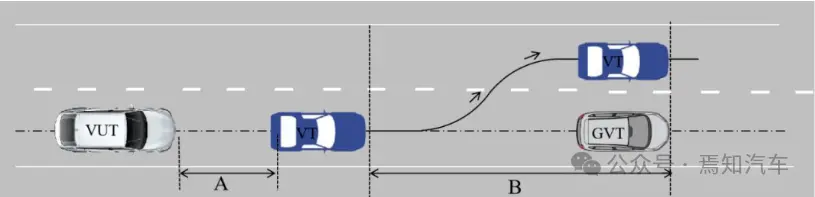
场景2:汽车正在高速公路上行驶,突然前方车辆急刹车。由于视线受阻,驾驶员来不及反应。
C-V2X解决方案:
前方车辆的紧急制动可以通过C-V2X向后方车辆发送警报信息。后方车辆收到警报后,可以及时采取紧急制动或变换车道等措施,避免追尾事故的发生。
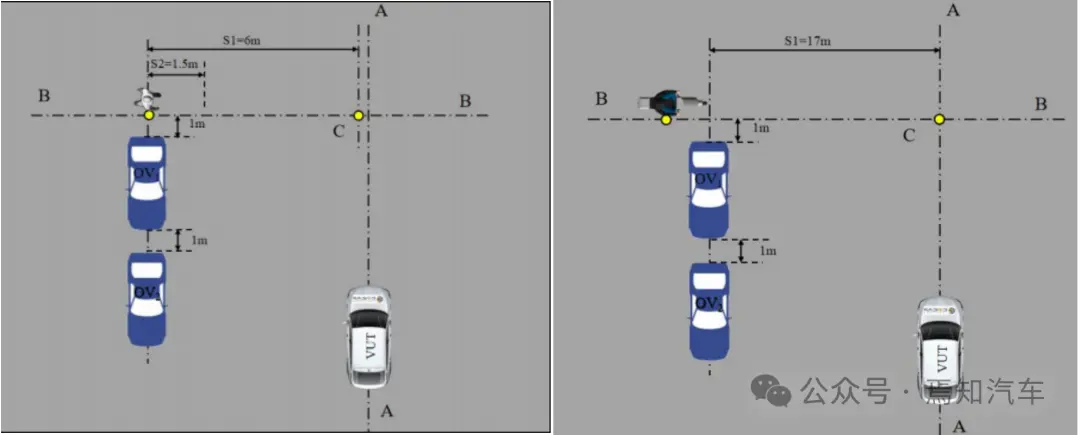
2、行人冲突测试:
场景描述:车辆行驶过程中突遇行人突然冲出道路,需要及时采取行动避免事故。
C-V2X解决方案:
如果车辆的感知系统检测到行人冲出的迹象,并且根据车辆动态判断认为存在碰撞风险,系统可以触发紧急制动程序。这个决策可以基于车辆自身的感知数据,同时也可以考虑车路协同系统提供的环境感知和实时交通信息。车辆也可以通过与周围车辆和基础设施的通信,发送紧急制动的警报信息,提醒其他车辆降低速度或采取避让动作,从而减少交通事故的发生。
另一方面,通过车路协同,交通信号灯可以向车辆发送行人警示信息。当交通信号灯侦测到行人时,可以向周围车辆发送警报,提醒驾驶员注意行人存在,帮助驾驶员及时采取行动避免事故。
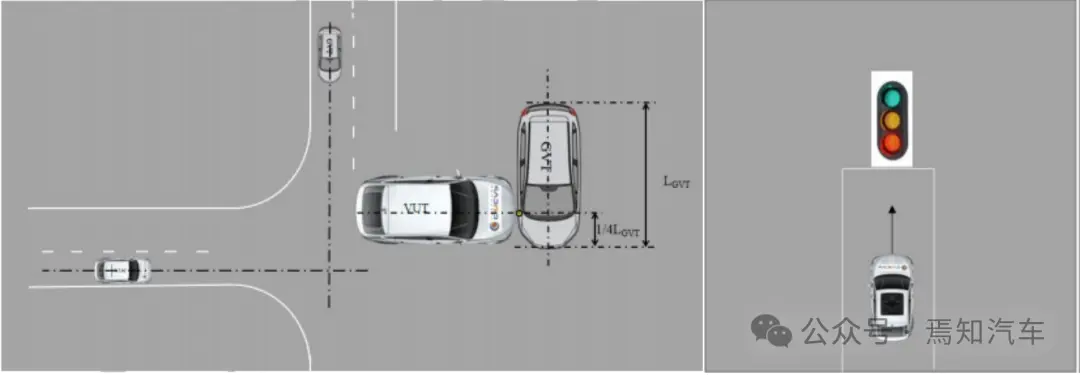
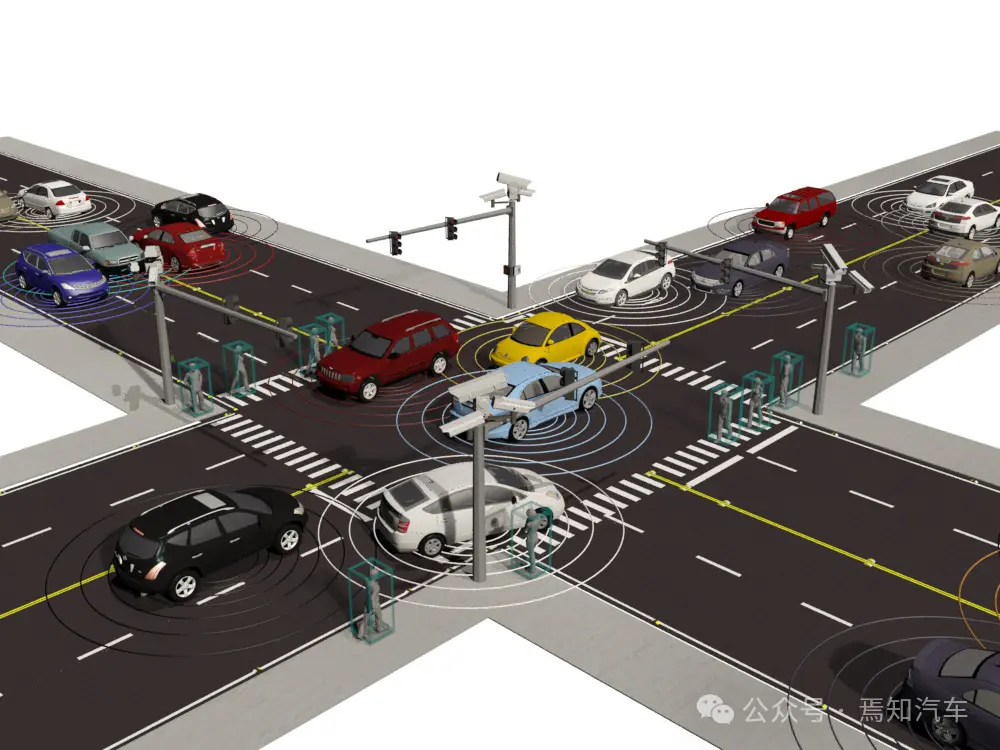
3、交叉路口测试:
场景1:车辆行驶至交叉路口时,需要观察交通信号灯状态和其他车辆行驶情况,确保安全通过路口。
C-V2X解决方案:
当涉及智能驾驶场景测试时,车路协同还可以提供更准确的环境感知、实时交通信息和安全警示,从而改善测试效果。
首先,车辆可以获取到交叉路口的交通信号灯状态信息,并根据信号灯状态合理规划行驶策略。通过智能交通信号灯与汽车通信,提供交通流量信息和行人通行状态。如果车辆接近交叉口,信号灯可以向车辆发送即将变红的警示,帮助车辆做好减速和停车的准备。此外,车辆间也可以进行信息共享,互相提醒交通情况,增强安全性。
具体说来,在接近路口时,车辆可以与交通信号灯进行通信。如果交通信号灯检测到车辆准备通过路口,但同时也检测到有行人冲出的情况,信号灯可以提前将红灯延迟,以确保车辆有足够的时间停下来避让行人。同时,周围的车辆也可以通过车辆间通信(V2V)向彼此发送警示信息,提醒其他车辆有行人冲出的风险,以便他们采取相应的行动。
场景2:汽车驶入交叉路口,需要左转。然而,有一名行人突然冲出路边,行人并没有走斑马线。
车路协同可以通过交通信号灯与汽车通信,提前发出警示,延长绿灯时间或改变信号灯状态。同时,其他车辆也可以收到警报信息,帮助驾驶员提前发现行人,并采取相应的行动,如减速或改变行驶方向。
通过以上分析可以看出,车路协同技术能够在CNCAP要求的测试场景中发挥重要作用,通过与道路基础设施的通信,实现车辆对周围环境的更全面感知,提高驾驶安全性和交通效率。
除了以上的标准场景测试外,车路协同技术还可以在其他很多智能驾驶场景中实现更好的信息处理。如下列举了几种典型的处理场景。
4、紧急情况处理测试:
场景:车辆突遇紧急情况(如车辆失控、交通事故等),需要及时向周围车辆发出警报并寻求帮助。
C-V2X解决方案:
通过车路协同,车辆可以向周围车辆发送紧急情况警报信息,提醒周围车辆注意并采取应急措施。同时,车辆也可以向交通管理中心发送求助信息,协助救援。
通过以上车路协同的应用,智能驾驶场景测试可以更全面地考虑到实际道路环境中的各种因素,提供更准确、更安全的测试解决方案。
5、道路施工和临时限制信息共享:
继续上述场景,我们可以进一步说明智能驾驶场景测试如何利用车路协同获得更好的解决方案。
场景描述:汽车行驶至一条道路,发现有临时道路施工,导致车道临时关闭。
交通管理中心可以向周围车辆发送临时交通限制信息,提醒驾驶员避开该区域。同时,车辆也可以通过V2V通信在车队内部分享信息,协助车辆选择适当的绕行路线。当车辆接近有道路施工或临时交通限制的区域时,周围的交通基础设施可以向车辆发送警示信息。这些信息可以包括临时交通标志、路面状态和限速警告,帮助驾驶员做出适当的反应,并避免潜在的危险情况。
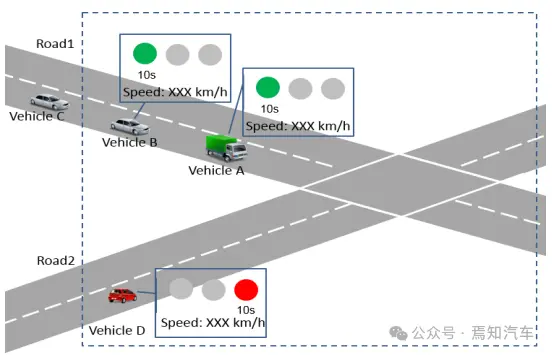
6、交通流量优化:
当智能车辆与道路基础设施实现协同时,可以在城市道路上行驶时进一步优化驾驶体验和交通流量管理。比如,当车辆驶入城市交通密集区域时,智能车辆可以通过与交通管理中心通信获取交通拥堵信息。如果系统检测到某些路段交通拥堵,它可以建议车辆选择更为畅通的替代路线,以减少行驶时间和燃料消耗。
同时,交通信号灯可以通过车辆与信号灯之间的通信来动态调整信号灯的时序,优化交通流量。例如,在高峰时段,交通信号灯可以延长主干道的绿灯时间,以减少拥堵并提高交通效率。
通过以上车路协同的应用,智能车辆可以更有效地应对城市道路上的各种情况,优化驾驶体验和交通流量管理。通过与道路基础设施的实时通信和数据共享,可以提高交通系统的效率和安全性,实现智能城市交通的可持续发展。
7、紧急情况下的路线优化:
如果有紧急情况(如交通事故、路面结冰等)发生,交通管理中心可以向周围车辆发送紧急警报信息,并提供最佳的绕行路线。智能车辆可以根据这些信息自动调整行驶路线,以避开危险区域,并确保安全和通畅的行驶。
同时,周围车辆也可以通过车辆间通信(V2V)向彼此发送警示信息,共同协助寻找最佳的绕行路线,避免交通拥堵和事故。
8、紧急救援协同:
场景描述:一辆车在偏远地区遭遇交通事故,驾驶员受伤无法拨打电话求救。
C-V2X解决方案:
车辆可以通过C-V2X向周围车辆或附近基础设施发送求助信息。周围车辆收到求助信息后可以立即通知紧急救援机构,并提供事故现场的准确位置,以便及时展开救援行动。
通过以上车路协同的应用,智能驾驶场景测试可以更好地模拟真实道路环境中的各种情况,并有效地评估自动驾驶系统的性能。通过车辆与道路基础设施之间的实时通信和数据共享,可以提高测试的准确性和全面性,从而更好地确保自动驾驶系统的安全性和可靠性。
基于如上这些场景示例说明了C-V2X技术如何在智能驾驶的测试中发挥作用,解决各种极端情况和corner case,提高了智能驾驶系统的安全性、可靠性和适应性。
那么车路协同如何与车端感知协同配合增强智能驾驶系统对车端感知无法解决的极端场景呢?两者的算法实现机制是啥样的?
车路协同通过车辆与道路基础设施(如交通信号灯、路边传感器、交通管理中心等)之间的通信,获取实时的交通信息、道路状态等。通过与道路基础设施的协同,车辆可以获取到车端感知无法提供的信息,例如路口交通信号、道路施工、行人冲出等情况。
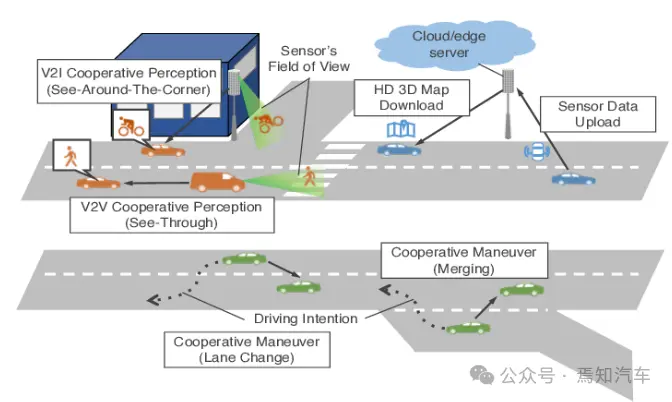
在算法实现机制上,车端感知和车路协同可以配合实现以下功能:
传感器数据融合:将车端传感器获取的数据与道路基础设施提供的信息进行融合,从而提高对周围环境的感知和识别能力。
环境感知更新:根据道路基础设施提供的实时信息,更新车辆的环境感知模型,及时发现并应对极端情况。
路径规划优化:根据道路基础设施提供的交通信息和道路状态,优化车辆的路径规划,选择最安全、最畅通的行驶路线。
紧急情况协同处理:在发生紧急情况时,车辆可以通过车路协同与交通基础设施和周围车辆进行通信,共同协助处理事故,并提供相应的警示和支持。
通过车端感知和车路协同的协同作用,智能驾驶系统可以更全面地感知和理解周围环境,提高对各种极端情况的应对能力,从而增强了智能驾驶系统的安全性、可靠性和适应性。
当车辆同时利用车端感知和车路协同进行环境感知时,融合策略至关重要。通过精心设计和实施融合策略,智能驾驶系统可以更有效地利用车端感知和车路协同的信息,从而增强对各种极端场景和corner case的适应能力,提高驾驶安全性和舒适性。
具体说来,如何设置融合策略呢?以下是一种细化的融合策略。
1、数据融合:
传感器数据融合:将车载传感器(如摄像头、雷达、激光雷达等)获取的环境数据以及车辆与道路基础设施的通信获取的信息进行融合。这包括位置、速度、方向、障碍物检测等信息。
信息融合:将来自车路协同的交通信息、道路状态、交通信号灯状态等与车端感知的环境信息进行融合。这可以通过算法对不同信息的权重进行动态调整,以适应不同场景的需求。
2、融合策略:
加权融合策略:根据数据来源的可靠性和实时性,为不同来源的数据赋予不同的权重。例如,对于高度可靠且实时性要求较高的数据,如交通信号灯状态,可以赋予更高的权重;而对于实时性要求较低的数据,如地图信息,可以赋予较低的权重。
动态融合策略:根据当前环境的特点和车辆自身状态的变化,动态调整融合策略。例如,在低能见度或者复杂交通情况下,可以增加对车路协同数据的重视程度,以弥补车端传感器可能存在的局限性。
容错融合策略:设定容错机制,当某一来源的数据发生异常或不可靠时,能够及时切换到其他来源的数据。例如,当车辆的传感器受到干扰或损坏时,可以依靠车路协同的数据来补充或替代。
实时更新策略:根据实时的数据情况和车辆的驾驶需求,持续更新融合策略。这包括对权重的实时调整、对数据有效性的动态评估等。
3、决策与执行:
基于融合后的环境感知数据,智能驾驶系统进行决策和控制。例如,根据融合后的数据进行路径规划、障碍物避让、速度调整等操作。在执行过程中,持续监测环境并根据最新的融合数据进行调整,以确保智能驾驶系统对环境的感知和应对能力达到最优状态。
车路协同与车端感知的融合策略性能评价标准
对于以上提到的融合策略生成的结果可以通过一系列性能指标进行评估和参考。这些性能指标可以帮助评估智能驾驶系统的感知准确性、决策效率、安全性等方面的表现。举例来说,对于一个具体的智能驾驶系统,可以在模拟环境或实地测试中收集到以下样本数据。具体场景中的具体数值对比会因不同的环境、车辆、道路条件等因素而有所不同。
通常情况下,智能驾驶系统的性能评估是通过模拟和实地测试来完成,从而获得真实世界中的性能指标。
1、感知准确性:
障碍物检测率(Detection Rate):检测到的障碍物数量与实际障碍物数量的比例。
误检率(False Alarm Rate):误报障碍物数量与实际不存在的障碍物数量的比例。
通过与道路基础设施的通信,可以弥补车端传感器的局限性,提高环境感知的准确性。例如,在视线受阻的情况下,道路基础设施可以提供额外的环境信息,使系统能够更好地感知周围环境。在模拟或实地测试中,车辆通过传感器和车路协同获得的环境信息与实际环境进行比较,得出检测率和误检率的数值。
通过车路协同助力的方式,智驾系统检测到的障碍物数量与实际障碍物数量的比例可以达到90%,而误检率可以保持在5%以下。
2、决策效率:
路径规划成功率(Path Planning Success Rate):成功生成可行路径的次数与总路径生成次数的比例。
路径规划时间(Path Planning Time):生成一条可行路径所需的平均时间。
实时获取的交通信息和道路状态可以帮助系统更快地做出决策,优化路径规划和避障策略,从而提高决策的效率和准确性。测试中可以记录路径规划的成功率和时间,并统计出平均值。
利用车路协同的方式助力情况下,路径规划成功率可以达到95%,平均路径规划时间在1秒以内。
3、安全性:
避障成功率(Avoidance Success Rate):成功避开障碍物的次数与遇到障碍物的次数的比例。
安全距离保持率(Safety Distance Keeping Rate):车辆与前方障碍物保持安全距离的比例。
车路协同可以帮助系统更及时地发现和应对潜在的危险情况,提高避障成功率和安全距离保持率,从而提高了驾驶安全性。
测试中可以模拟各种情况下的障碍物避让和安全距离保持情况,并统计成功率。
利用车路协同的方式助力情况下,避障成功率可以达到80%,安全距离保持率可以保持在90%以上。
4、实时性:
数据更新频率(Data Update Frequency):环境感知数据的更新频率,即每秒接收到新数据的次数。
融合结果生成时间(Fusion Result Generation Time):生成融合后环境感知结果所需的平均时间。
车路协同可以实现对交通信息和道路状态的实时获取和更新,从而提高了数据更新的频率和融合结果生成的速度,使系统能够更快地适应变化的环境。数据更新频率和融合结果所生成的时间可以通过实时监测系统的工作情况来获得。
利用车路协同的方式助力情况下,数据更新频率可以达到每秒10次,融合结果生成时间可以保持在100毫秒以内。
5、容错性:
切换成功率(Switch Success Rate):由于某一数据源异常而需要切换到另一数据源的次数与总切换次数的比例。
切换时间(Switching Time):从发现异常到切换到备用数据源所需的平均时间。
通过从多个数据源获取信息并实施切换策略,车路协同可以提高系统的容错性和稳定性,使系统在某一数据源异常时能够及时切换到备用数据源,保障系统的正常运行。切换成功率和切换时间可以在测试过程中模拟数据源异常情况,并记录结果。
利用车路协同的方式助力情况下,切换成功率可以保持在95%以上,切换时间可以控制在100毫秒以内。
可以通过如上这些性能指标可以帮助评估融合策略的效果,并提供改进的方向。通过对性能指标的监测和分析,可以不断优化融合策略,提高智能驾驶系统的整体性能和稳定性。通过这些具体的数值对比,可以评估智能驾驶系统在与车路协同配合在不同场景下的性能表现,并根据测试结果进行优化和改进。
写在最后
本文通过详细介绍车路协同在智能驾驶的一些有效助力及闪光点分析,不难看出,在加入车路协同后,确实可以期待性能指标有所提升,尤其是在特定场景和情况下。具体的数值提升幅度会受到多种因素的影响,包括但不限于车辆和道路基础设施的部署情况、通信网络的稳定性、算法优化程度等。
当然,如果汽车主机厂要通过最新的CNCAP 2024要求的包括C-V2X测试在内的复杂测试,可能会面临一定的挑战和困难。这是因为这些测试涉及到多个方面的技术和合作,包括但不限于通信技术、数据安全、系统集成等。汽车主机厂单独很难完成所有这些要求,主要原因包括:
技术复杂性:C-V2X测试涉及到多个技术领域的复杂问题,需要具备通信、网络、安全等多方面的技术知识和能力。汽车主机厂可能无法独立解决所有技术挑战。
标准化和合规性:C-V2X测试需要遵循特定的标准和规范,同时要求数据的安全和隐私保护。这需要与其他厂商和机构进行合作,并确保符合相关的法律法规和标准要求。
基础设施建设:实现C-V2X测试需要建立稳定可靠的通信网络覆盖和基础设施支持。这涉及到政府、通信运营商等多方的合作和支持。
互操作性和系统集成:C-V2X测试要求不同车辆和基础设施之间能够正常进行通信和数据交换,需要解决互操作性和系统集成的问题。这需要与其他厂商和机构进行合作,确保整个系统的顺利运行。
综上所述,汽车主机厂要通过CNCAP 2024要求的C-V2X测试可能会面临一定的挑战,需要与其他厂商、政府机构、标准化组织等多方合作,共同推动C-V2X技术的发展和实际应用。



 广告
广告 编辑推荐




最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
