




 广告
广告





















































让车辆做到“耳听八方”,毫米波雷达芯片与系统设计

01、前言
近几年汽车产业的智能化技术发展迅速,各大厂商对车规级传感器的需求量呈指数级增加,对相关产品的功能水平也提出了更高的要求。在L2及以上智能驾驶领域,车载毫米波雷达已经成为标配。数据显示,2021年中国乘用车前雷达、后角雷达、前角雷达的前装渗透率分别为34%、14%、2%。进入2023年以来,汽车智能化进一步提速,再加上高性能4D毫米波雷达商用落地,整个市场体量进一步扩容。具行业权威机构评估,预计今年我国乘用车市场毫米波雷达安装量将超1800万个,到2025年,安装量更是有望突破2400万个,市场规模将突破200亿元!
毫米波雷达,是指工作在毫米波波段(一般为30~300GHz频域,波长1~10mm)探测的雷达。毫米波雷达体积小、质量轻、空间分辨率高,穿透“雾烟灰”的能力强,还具备全天候全天时工作的优势。在智能网联汽车体系中,毫米波雷达是系统感知层不可或缺的重要硬件,能让智能驾驶感知系统立体化。
雷达系统设计是一个复杂的过程,它的仿真和分析涉及Digital、Analog、射频和数据处理等诸多领域。这些域涵盖整个信号链:从天线阵列到雷达信号处理算法,再到数据处理和控制。由此产生的系统级复杂性推动了在开发周期的所有阶段进行建模和仿真的需求。MATLAB雷达工具箱功能强大,拥有成熟的信号处理和雷达工具箱,是设计、仿真、分析和测试多功能雷达系统算法的优秀工具。
02、基于MATLAB的微波雷达系统开发
用MATLAB和Simulink作为雷达系统设计的建模和仿真工具平台可以改善雷达系统设计工作流程的各个方面,例如:雷达参数选择;利用匹配滤波、自适应波束成形、目标检测、空时自适应处理、环境和杂波建模以及到达方向估计等算法库加速开发;对场景进行建模;多功能相控阵系统设计;标记雷达信号并仿真雷达数据;集成射频组件和复杂天线设计的模型,提高雷达系统设计保真度;项目早期阶段调试和测试完整的雷达模型,以降低代价高昂的重新设计风险;MATLAB和Simulink模型自动生成代码,以部署到DSP和可编程门阵列硬件。
同时,MATLAB和Simulink可设计不同规模和保真度的复杂对象,包括地面、空中和太空等。在建模时可根据需要选择系统层级、波形层级、目标类别层级进行最大程度的模拟真实对象。随着人工智能的技术逐渐趋于成熟,现已被广泛应用在雷达系统开发上,例如基于雷达散射截面/微多普勒的目标分类、基于射频指纹进行分类、对接收到的波形进行分类、检测异常情况、识别合成孔径雷达图像中的目标等。
2.1 雷达系统设计
多功能雷达系统设计涵盖从需求分析开始的一系列任务,首先使用Radar Designer应用程序以交互方式执行链路预算分析并评估设计权衡。其次连接雷达工作流程,包括需求和架构分析、系统设计和验证,使用统计模型和信号级模型对雷达进行仿真,对闭环多功能雷达进行建模,最后将雷达信号处理算法部署到可编程门阵列硬件和处理器。
基于MATLAB的雷达设计界面如下图,包括雷达参数设计、目标参数设计以及环境设计等功能。
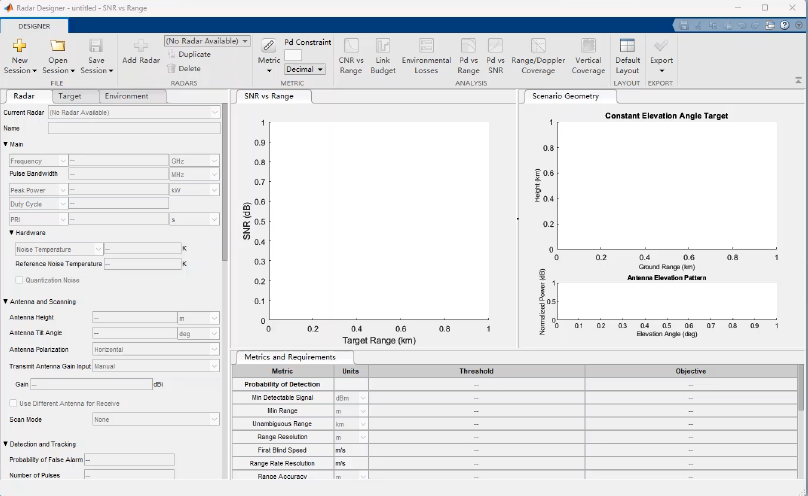
图1 基于MATLAB的雷达设计界面
2.1.1天线/天线阵列设计
天线/天线阵列设计包含三个工具箱:天线工具箱、相控阵系统工具箱以及地图工具箱。天线工具箱为天线元件和阵列的设计、分析和可视化提供了功能和应用程序。相控阵系统工具箱在MATLAB和Simulink中提供算法和应用程序,用于设计和模拟无线通信、雷达、声纳和声学应用中的传感器阵列和波束形成系统。地图工具箱提供了用于转换地理数据和创建地图显示的算法和功能,可以在地理环境中可视化数据,并将来自各种来源的数据转换为一致的地理坐标系。
2.1.2RF/ADC/DAC系统设计
RF/ADC/DAC系统设计包括射频工具箱、射频模块库、射频印刷电路板工具箱以及混合信号模块库。射频工具箱提供用于设计、建模、分析和可视化射频组件网络的功能、对象和应用程序。该工具箱支持无线通信、雷达和信号完整性项目。射频模块库提供用于设计射频通信和雷达系统的Simulink模型库和模拟引擎。射频印刷电路板工具箱提供用于设计、分析和可视化高速和射频多层印刷电路板的功能和应用程序。可以设计具有参数化或任意几何图形的零部件,包括分布式无源结构,如迹线、折弯和过孔。使用矩的频域方法,可以对耦合、色散和寄生效应进行建模。混合信号模块库用于设计和验证混合信号集成电路的组件和损伤模型、分析工具和测试台。
2.2 雷达信号处理算法的HDL实现
雷达数字后端数据带宽非常大,必须通过定制的硬件才能实现,可编程门阵列/专用集成芯片是必然的选择。将基于可编程门阵列的平台连接到MATLAB和Simulink后,可以为平台上运行的算法自动生成HDL和C代码,以进行天线算法原型设计。
2.2.1 面向硬件的模型设计
为了在硬件上高效的执行程序,需要进行时钟定时、并行化、流水线、流处理、资源映射等设置。时钟是系统中的基准信号,用于同步各个部件的操作,定时器是一种硬件设备,用于生成精确的时间间隔;并行是通过在硬件级别上同时执行多个计算任务来提高计算机系统的性能;流水线是将每条指令分解为多步,并让各步操作重叠,从而实现几条指令并行处理;流处理是指连续的数据流,并以高效的方式对数据进行处理和分析,因此可以看出Simulink非常契合硬件体系架构。
2.2.2 基于Simulink的雷达信号处理
发射LFM波形、接受反射波、系统定时控制室雷达系统的三个基本组件,其实现原理如下图:
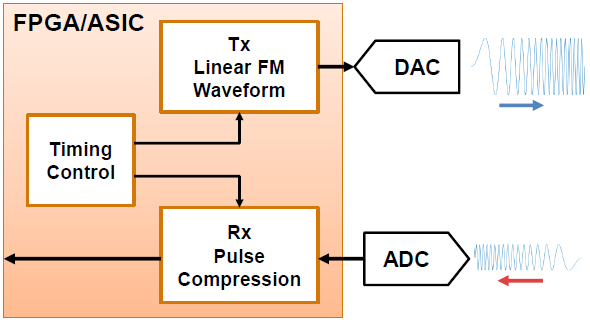
图2 Simulink雷达信号处理流程
NCO模块生成实数或复数正弦信号,而提供硬件友好的控制信号。NCO累加相位增量并使用累加器的量化输出,定点累加器和量化器数据的环绕类型提供正弦波的周期性,量化减小了必要的尺寸给定频率分辨率的表。相位增加计算公式为
phase increment = round(F0TS2N) (1)
其中:F0为波长,TS为周期,N为累计长度。
2.2.3 HDL代码生成
HDL代码生成是通过点击MATLAB建模界面命令框的HDL Coder并选中左上角WorkflowAdvisor可生成Verilog或VHDL代码。HDL Coder支持包可进行Xilinx RFSoC雷达原型及信号处理的硬件设计,生成HDL IP core并自动集成到用于ZCU111和ZCU216 RFSoC evaluation Kits参考设计中,并支持MATLAB和IP核通信,传输数据,配置射频前端Transceiver设计。IP核生成流程是使用HDL Workflow Advisor配置Transceiver,定义Simulink模型端口与参考设计的接口,生成Vivado工程,并编译。完成以上工作后可进行MATLAB与硬件的交互运行。
03、案例介绍
案例介绍一种用MATLAB新方法学来验证汽车雷达系统的设计。该方法学将规格书级别指标的早期验证与虚拟现场试验相结合,此外,通过在虚拟现场试验中仿真路试场景,我们可以使用真实测试激励对雷达IC硬件进行环境在环验证。
一线汽车供应商最关心的就是规格书中的各项性能指标,比如信噪比和总谐波失真。另外,利用现场试验和真实驾驶场景来评估完整的雷达系统,而IC验证团队则使用与真实信号相去甚远的测试图形来评估单个射频、模拟和数字组件(图3)。
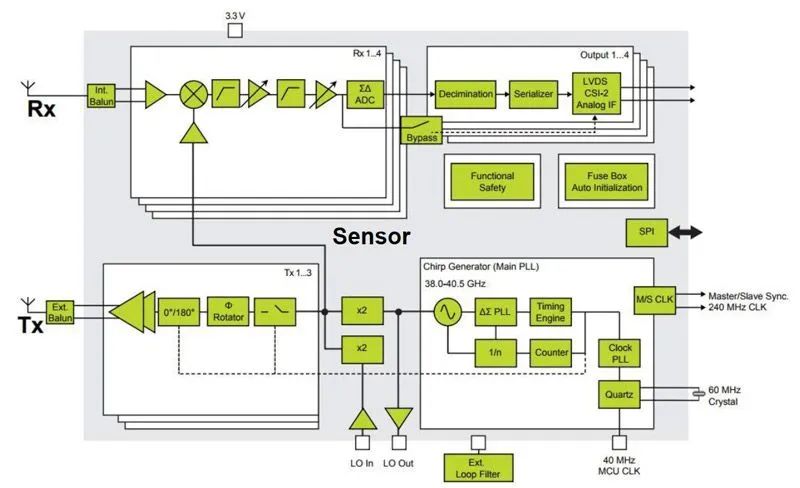
图3 包含射频、模拟和数字子系统的汽车雷达系统架构
通过开发MATLAB算法,不仅能计算SNR、THD和功率谱密度等高级设计指标,还能计算滤波器和其他组件的指标,如阻带衰减和通带波纹。使用HDL Verifier基于这些 MATLAB算法生成SystemVerilog DPI组件,并将它们集成到HDL测试平台用于Cadence仿真环境(图4)。
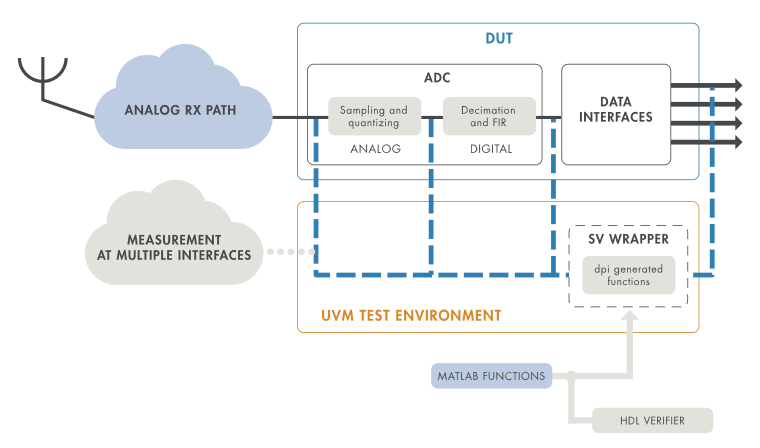
图4 使用MATLAB验证函数的测试环境,函数借助HDL Verifier通过DPI-C在SystemVerilog封装中实现
采样信号数据通过DUT进行采集,然后传递给MATLAB验证代码所产生的DPI-C函数。绘制测试结果图(图5),并与系统需求进行对比,以确保设计符合规格书。
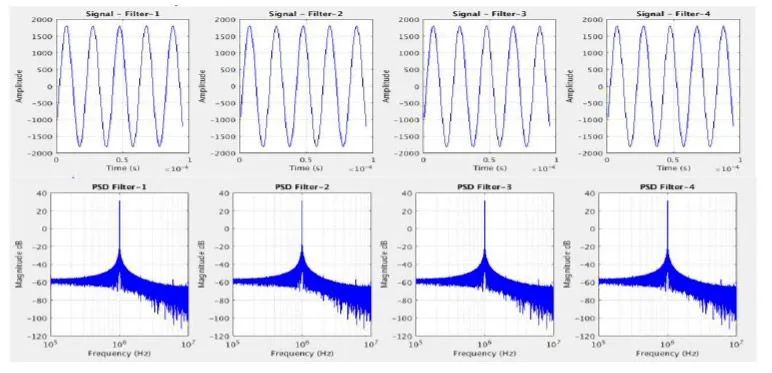
图 5 采样信号(上)和MATLAB计算得出的功率谱密度图(下)
在过渡到指标驱动的验证方法时,使用真实驾驶场景数据进行虚拟现场试验。利用自动驾驶工具箱中的驾驶场景设计器(图 6)构建驾驶场景。该App中的预置场景代表了Euro NCAP测试协议。这些协议正是客户评估雷达系统性能的基准。
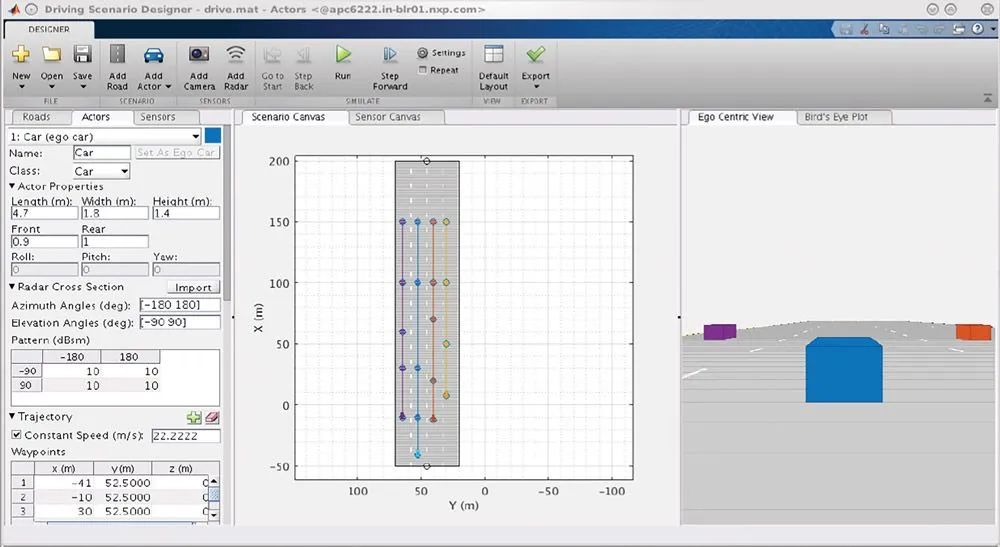
图6 Automated Driving Toolbox中的驾驶场景设计器
然后用相控阵工具箱构建一个雷达传感器模型。为了让此模型符合实际所用传感器的规格书,调整有关天线孔径、峰值发射功率、接收机噪声系数以及天线单元数量的参数。此外还调整了影响调频连续波波形的某些参数,比如最大距离、线性调频时长、扫描带宽和采样率。把这个传感器模型集成到之前构建的驾驶场景中,将雷达传感器虚拟地安装在自主车辆上(图 7)。
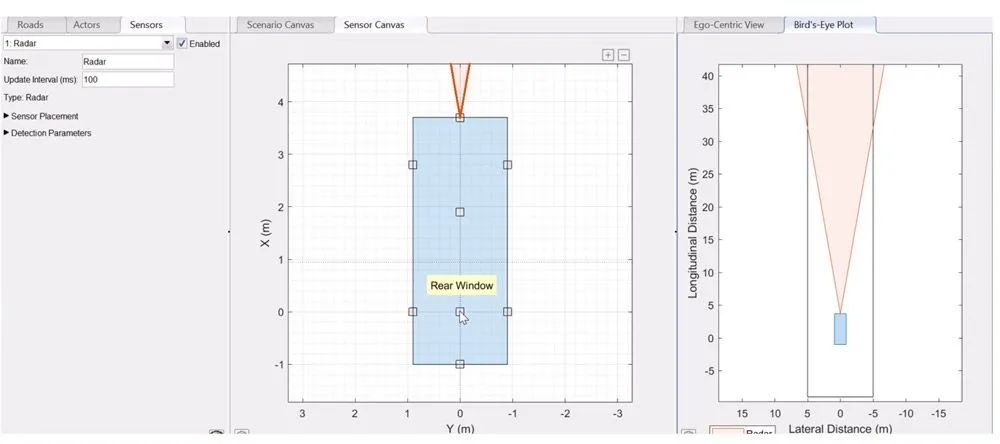
图7 用于管理自主车辆上雷达传感器位置的界面
接下来执行这个驾驶场景,并捕获传感器的混频器输出,即场景中目标的雷达反射的解线性调频信号。使该解线性调频信号通过ADC设计中的Simulink模型以生成数字IQ数据,然后将这些数据馈入数字基带处理链。就可以生成基于Euro NCAP驾驶场景的IQ数据,并在研发的早期阶段(可能早于初次流片一年甚至更多)进行数字处理链的虚拟现场试验(图 8)。
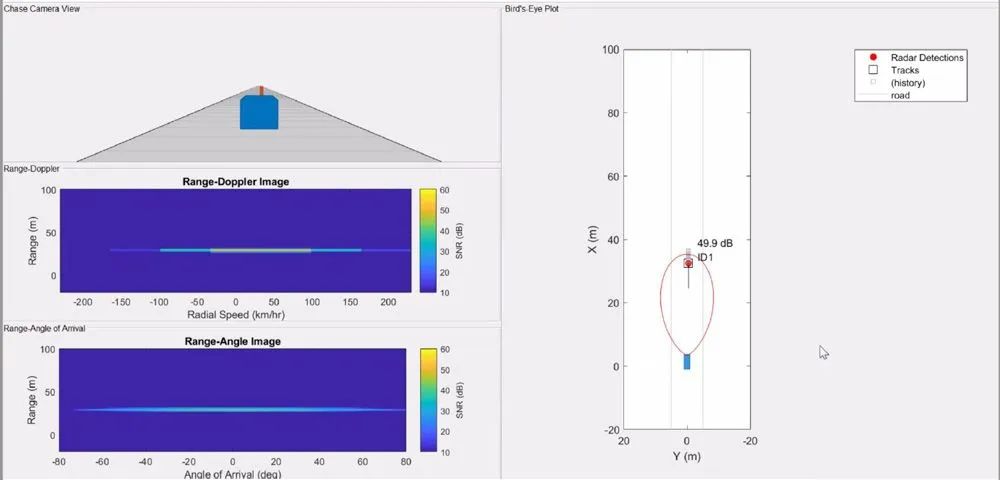
图8 虚拟现场试验的跟拍视图(左上)和鸟瞰图(右)
04、结论
通过上文的介绍可以得出如下结论MATLAB/Simulink可用于智能座舱微波雷达系统设计与芯片开发;可提供天线、射频系统、算法、场景建模仿真工具和环境;可从模型生成HDL代码,用于可编程门阵列/专用集成芯片设计和原型验证;可从模型生成DPI-C,用于芯片的UVM验证。
由于基础科研实力相对较弱,过去我国传统毫米波雷达市场长期受到海外巨头的垄断。直到近年来,在利好政策驱动下,细分赛道的头部科研单位、生产企业开始持续加大产业投入,越来越多的企业进入车载毫米波雷达赛道,市场竞争愈发激烈,推动了车载毫米波雷达技术的不断创新和进步。在中国市场,国内毫米波雷达厂商逐渐打破了国外汽车零部件巨头的垄断,实现了前装量产突围,在小范围内实现国产替代。在4D成像雷达技术上,国内和国外厂商已经站在同一个起跑线上,国内毫米波雷达厂商实现国产“超越”成为可能,有望在新一轮产业变革中破局。



 广告
广告 



最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
