




 广告
广告





















































自动驾驶车辆的系统架构

自动驾驶汽车的自主系统的架构通常被分为感知系统、决策系统和控制系统。感知系统通常被划分为许多子系统,负责自动驾驶汽车定位、静态障碍物绘制、移动障碍物检测和跟踪、道路映射、交通信号检测和识别等任务。决策系统通常也被划分为许多子系统,负责路线规划、路径规划、运动规划和控制等任务。底盘控制系统主要包括线控驱动、线控制动、线控转向等系统,执行决策与规划系统得出的底盘控制指令。本文详细介绍了有关感知系统和决策系统的各种方法。
图1展示了自动驾驶汽车自动化系统的典型分层架构的框图,其中感知和决策系统显示为不同颜色的模块的集合。感知系统负责使用车载传感器(例如LIDAR,RADAR,摄像机,GPS,IMU,里程表等)捕获的数据来估计汽车的状态和创建外部环境的内部(对自动驾驶系统而言)表示,以及有关传感器模型,道路网络,交通规则,汽车动力学等的先验信息。决策系统则负责将汽车从初始出发位置导航到用户定义的最终目的地,在此期间要考虑汽车状态和(感知到的)环境的内部展示,以及交通规则和乘客的舒适度。
为了在整个环境中驾驶汽车,决策系统需要知道汽车在哪里。如图1中,定位模块负责估算与环境静态地图相关的汽车状态(姿势,线速度,角速度等)。尽管可以手动注释(即人行横道或交通灯的位置)或编辑(通常需要用于移除传感器捕获的非静态物体),这些静态地图(或离线地图)是在自主操作之前自动计算的,通常使用的是自动驾驶汽车本身的传感器。自动驾驶汽车可以使用一个或多个不同的离线地图(如占据栅格地图,remission地图或地标地图)用于本地离线化。
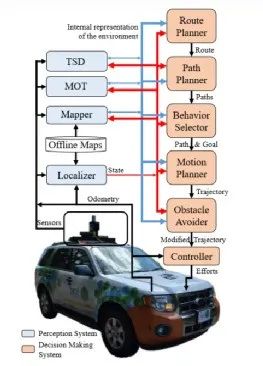
图1 自动驾驶汽车的典型分层架构
定位模块接收离线地图,传感器数据和平台的里程表作为输入,并生成自动驾驶汽车状态的输出(图1)。值得注意的是,虽然GPS可能有助于定位过程,但由于高大的树木,建筑物,隧道等造成的干扰,GPS单独在城市环境中的正确定位是不够的,这也使得GPS定位不可靠。
道路绘制模块接收离线地图和状态作为输入,并生成在线地图的输出。该在线地图通常是结合离线地图中存在的信息以及使用传感器数据和当前状态在线计算的占据栅格地图。
自动驾驶汽车必须识别和遵守水平(车道标记)和垂直(即速度限制,交通信号灯等)交通信号。如图1,TSD(交通信号检测模块)负责交通信号的检测和识别。
- 下一篇:利用内省学习和推理增强基于栅格的运动规划
- 上一篇:专利揭秘上汽“躺式”电池安全设计



 广告
广告 



最新资讯
-
泰克2系列MSO混合信号示波器:远程控制与协
2026-04-01 15:56
-
城市工况下,底盘系统为什么更难?系统架构
2026-04-01 15:56
-
理工雷科亮相UWA AItoH生态交流会并作主题
2026-04-01 14:37
-
联合国法规R94对乘员防护的工程化约束
2026-04-01 12:23
-
联合国法规R93对车辆前下部防护装置的工程
2026-04-01 12:23
