




 广告
广告





















































自动驾驶车辆的系统架构

路线规划模块是在给定离线地图中定义的最终目的地的情况下,在离线地图中计算从当前状态到最终目标的路线。路径是一系列路径点,其中每个路径点是离线地图中的坐标对。
轨迹规划模块是在给定路径情况下,考虑汽车状态和环境的内部表示以及交通规则,计算出单条路径的多个组合。路径是一系列姿态,其中每个姿势是离线地图中的坐标对,以及在此定义的位置处所需的汽车方向的坐标对。
行为决策模块负责选择当前的驾驶行为,例如车道保持,交叉路口处理,交通灯信号处理等。该模块用来选择在当前状态(决策范围)前几秒钟(大概是5秒时间)在路径中以及此姿势状态下的所需速度。姿势和相关的速度组成一对称为Goal,行为决策模块需要在考虑当前的驾驶行为,并避免在决策时间范围内与环境中的静态和移动障碍物发生碰撞下选择一个Goal。
运动规划模块负责计算从当前汽车状态到当前Goal的轨迹,该目标遵循行为决策模块定义的路径,并满足汽车的运动和动态约束,和乘客的舒适感。一个轨迹需要将汽车从当前状态平稳地、安全地带到目标位置。
避障模块接收由运动规划模块计算的轨迹并在必要时更改它(通常降低速度)以避免碰撞。
最后,控制模块接收运动规划模块得到轨迹以及经由避障模块修改后的轨迹(通常是是降低速度),并计算并发送有作用效果的命令到方向盘,油门和制动器的执行器,以使汽车最好地在真实物理环境下修改轨迹。
下面是一些有关以上模块形成的方法。
感知系统
在该系统中,包含了汽车定位、静态障碍物绘制、道路映射、移动障碍物跟踪以及交通信号检测和识别几大模块。
1.1汽车定位
定位模块负责估计相对于地图或道路(例如,由路缘或道路标记表示)的自动驾驶汽车姿态(位置和方向)。大多数通用定位子系统都基于GPS的。然而,总的来说,它们不适用于城市自动驾驶汽车,因为GPS信号在闭塞区域无法保证,例如在树下、城市峡谷(被大型建筑物包围的道路)或隧道中。文献中提出了各种不依赖GPS的定位方法。它们主要可分为三类:基于激光雷达的、基于激光雷达加相机的和基于相机的。仅依赖于LIDAR传感器的基于激光雷达的定位方法可提供测量精度和得到数据易于处理。然而,尽管LIDAR行业努力降低生产成本,但是其与相机相比仍然具有较高的价格。在典型的LIDAR加上摄像机的定位方法中,LIDAR数据仅用于构建地图,并且通过摄像机数据估计车辆相对于地图的位置。这样的做法降低了成本。基于相机的定位方法便宜且方便,但是这种方法通常不太精确和可靠。
1.1.1基于激光雷达的汽车定位
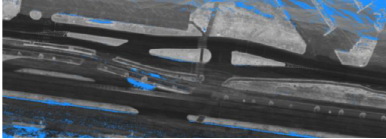
(1)一种在LIDAR激光射线的环境反射率(激光反射网格图,如图2)使用概率分布的离线网格图用来定位的方法。该方法使用了HDL-64E-Velodyne激光雷达并通过无监督校准方法来校准HDL-64E-Velodyne激光束。这使得激光雷达对具有相同亮度的物体的响应类似。使用二维直方图滤波器估计自动驾驶汽车的位置。通常,滤波器由两部分组成:运动更新(或预测):用来减少基于运动的估计的置信度;以及测量更新(或校正):用来增加基于传感器数据的估计的置信度。在运动更新过程中,汽车运动以高斯分布噪声随机“游走”,从通过航位推算坐标系(使用Applanix LV-420导航系统的惯性更新计算)漂移到离线地图的全局坐标系。在测量步骤中,对于不同的位移,它们使用在线计算的反射图与离线计算的反射图之间的相似性。其中,每个位移对应于直方图滤波器中的直方图的一个单元。为了将直方图概括为单个姿势估计,它们使用由直方图建模的概率分布的质心。然而,该方法没有描述他们如何估计方向。该方法显示均方根(RMS)横向误差为9厘米,均方根(RMS)纵向误差为12厘米。
(2)一种蒙特卡洛(MCL)定位方法,该方法将卫星地图与反射得到的地图进行比较。卫星地图从互联网上离线下载,如OpenStreetMap,并且通过LIDAR接受反射强度数据实时构建反射的地图。MCL算法用于通过使用归一化互信息(NMI)度量将反射得到地图与航卫星地图匹配从而来估计汽车姿态以计算粒子可能性。该方法在机器人汽车“IARA”收集的6.5 km数据集上进行评估,并获得0.89 m的位置估计精度。该方法的一个优点是它不需要专门为该方法构建地图。
(3)一种基于道路特征检测的定位方法。他们的路缘检测算法使用环压缩分析和最小修剪方块来分析由多层LIDAR(HDL-32E-Velodyne)扫描形成的连续同心测量(或环)之间的距离。道路标记检测算法使用Otsu阈值来分析LIDAR反射强度数据。路缘和道路标记功能存储在网格地图中。蒙特卡洛定位(MCL)算法用于通过将从多层激光雷达测量中提取的道路特征与网格图匹配来估计汽车姿态。该方法在自主车辆“CARINA”上进行了评估,并且显示出横向和纵向定位估计误差小于0.30 m。
(4)一种多层自适应蒙特卡罗定位(ML-AMCL)方法,流程如图3所示,该方法与3D点配准算法结合使用。为了估计汽车姿势,该方法从3D LIDAR测量中提取水平层,并且使用单独的自适应蒙特卡罗方法来对准具有使用3D点配准算法构建的3D点云图的2D投影的层。对于每个姿势估计,执行针对一系列测距测量的一致性检查,并将一致的姿势估计与最终姿势估计融合。该方法在现实世界数据上进行评估,并获得相对于GPS参考的0.25米的位置估计误差。
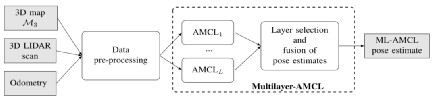
图3 多层自适应蒙特卡洛定位方法示意图
(5)一种基于蒙特卡罗算法的定位方法,该方法通过2D占据栅格地图和2D离线占据栅格地图之间的地图匹配来校正粒子的姿态,如图4所示。对两个地图匹配距离函数(两个网格图之间的传统似然场的距离的改进版本,以及两个高维向量之间的自适应标准余弦距离)进行了评估。其中在IARA自动驾驶汽车的实验评估表明,定位方法能够使用余弦距离函数在约100Hz下工作,并且横向和纵向误差分别为0.13 m和0.26 m。
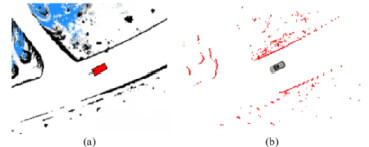
图4 占据栅格地图匹配定位方法
(6)一种概率定位方法。该方法将世界建模为高斯混合的多分辨率图(如图5所示)。其中,高斯混合图由多层LIDAR扫描仪(HDL-32E-Velodyne)测量的场景下的高度和反射强度(remission)分布辨识。扩展卡尔曼滤波器(EKF)定位算法用于通过高斯混合多分辨率图的3D点云来估计汽车的姿态。该方法在恶劣天气条件下对两辆无人驾驶汽车进行了评估,结果显示了该方法定位估算误差约0.15米。
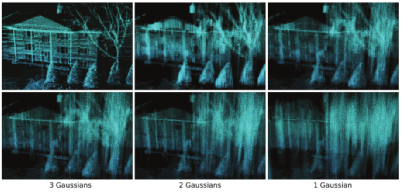
图5 概率定位方法
1.1.2基于激光雷达加摄像头的汽车定位
一些方法通过使用LIDAR数据来构建地图以及摄像头获取的数据,估计自动驾驶车相对于该地图的位置。
(1)一种将立体图像与3D点云图匹配的定位方法。该地图由地图公司生成(http://www.whatmms.com),地图由几何数据(纬度,经度和高度)以及里程表,RTK-GPS和2D LIDAR扫描仪获得的反射的数据组成。该算法可用于解决使用立体相机的基于三维(3D)点云地图(PCL)的定位问题。该3D点云图由密集的3D几何信息和基于3D光检测和测距(LIDAR)扫描仪的映射系统生成的表面反射率值的强度度量组成。尽管已经提出了一些基于LIDAR的定位算法,但该方法提出了一种使用更便宜的商品立体相机,且精度能达到厘米级的定位算法。具体而言,在每个候选位置,将3D数据点从真实世界坐标系转换到相机坐标系,并从3D PCL地图合成虚拟深度和强度图像。通过将这些虚拟图像与立体深度和强度图像相匹配来估计每帧中真实世界和车辆坐标之间的转换,从而定位自我车辆。流程图如下图6所示:
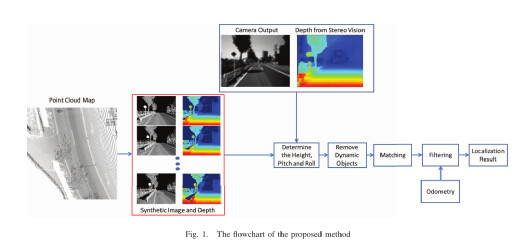
图6 3D点云地图定位
(2)一种将陆地的全景图像与一年中不同季节捕获的卫星图像相匹配自动驾驶汽车定位方法。在该方法中,LIDAR数据被分类为地面和非地面类别。接着,使用LIDAR数据将由自动驾驶车中的全景相机捕获的地面图像分割成地面和非地面区域,然后变换为鸟瞰图。其中,通过使用KMeans聚类方法将卫星图像分割成地面/非地面区域。然后使用蒙特卡罗算法将鸟瞰图像与卫星图像匹配,从而估计姿势。该方法在NavLab11自动驾驶汽车上进行了评估,并实现了3米到4.8米之间的位置估算误差。
1.1.3基于摄像头的汽车定位
在定位方法,有一些方法主要依靠摄像头数据来定位自动驾驶汽车。
(1)一种基于视觉里程计和路线图的定位方法。他们使用OpenStreetMap,从该图中提取所有交叉点和所有可行驶道路(用分段线性段表示),并将它们连接到感兴趣的区域。然后,他们构建了这个路线图的基于图形的表示以及汽车如何遍历该图的概率模型。使用这种概率模型和视觉里程测量,他们估计相对于路线图的汽车位移。
递归贝叶斯过滤算法用于通过利用其结构和汽车运动速度(通过视觉里程计测量)的模型来执行图中的推断。该算法通过增加当前位于汽车最新运动(直线距离以及近期曲线)图的位置点的姿势的可能性以及降低与之不相关点的可能性来精确定位汽车在地图中的位置。(2)在一些方法中,特征图通过使用相机数据来构建。该方法中描述了自动驾驶汽车Bertha自主驾驶的定位方法。论文开发了一种基于互补视觉的定位技术:基于点特征的定位(PFL)和基于车道特征的定位(LFL)。如下图7所示(其中a为点特征,b为车道特征),在PFL(点特征的定位)中,将当前相机的图像同先前进行测绘过程中提取的DIRD描述符中获取的一系列相机图像的图像进行比较。全局位置估计从制图过程中获取图像中的全局位置恢复。在LFL(车道特征的定位)中,半自动计算的地图提供道路标记特征(水平道路信号化)的全局几何表征。通过检测并关联从相机图像的鸟瞰视图提取的道路标记特征与存储在地图中的水平道路信号,将当前相机图像与地图匹配。然后通过卡尔曼滤波器组合由PFL和LFL获得的位置估计。
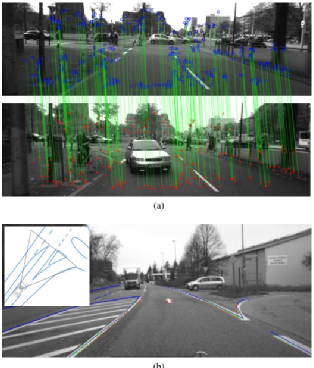
图7 视觉互补定位方法(3)另一些方法通过使用相机数据来构建特征图,但还是采用替代类型的特征。如一种在城市场景中使用柱状地标作为主要特征(如下图8所示)的方法,因为柱状地标是独特的、长期稳定的,并且可以通过立体摄像系统可靠地检测到。此外,生成的地图表示是内存高效的,允许轻松存储和在线更新。定位由作为主传感器的立体摄像系统实时执行,使用车辆里程计和现成的GPS作为辅助信息源。通过粒子滤波方法进行定位,结合卡尔曼滤波实现鲁棒性和传感器融合。
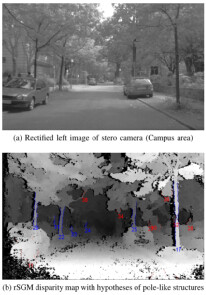
图8 利用柱状地标实现稳定定位
- 下一篇:利用内省学习和推理增强基于栅格的运动规划
- 上一篇:专利揭秘上汽“躺式”电池安全设计



 广告
广告 



最新资讯
-
泰克2系列MSO混合信号示波器:远程控制与协
2026-04-01 15:56
-
城市工况下,底盘系统为什么更难?系统架构
2026-04-01 15:56
-
理工雷科亮相UWA AItoH生态交流会并作主题
2026-04-01 14:37
-
联合国法规R94对乘员防护的工程化约束
2026-04-01 12:23
-
联合国法规R93对车辆前下部防护装置的工程
2026-04-01 12:23
