




 广告
广告





















































声功率与声强(4)—— 基于声强测量的声功率测试

本文为声功率与声强系列文章的第四部分,主要介绍基于声强测量的声功率测定方法及应用。
1、基于声强测定声功率
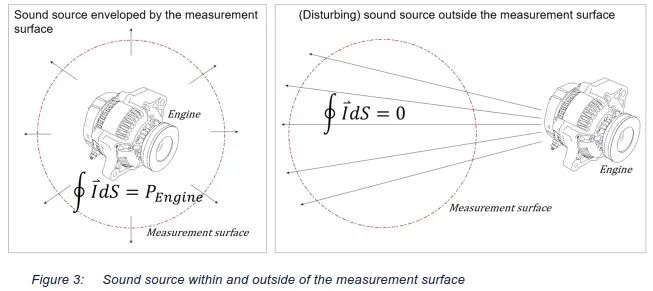
为了利用包络面法由声强确定声功率,首先需要定义一个包络声源的测量面。选择的测量面必须确保测量面内没有其他声源或吸声。
为了确定穿透测量包络面的声能量,在垂直于预定义的测量面上若干点处测量声强,并在表面上做空间平均。空间平均有两种方法:连续扫描法和离散点测量法。

连续扫描法
探头在测量表面上像刷油漆一样匀速循环移动。在扫描过程中连续测量声强,平均时间为整个扫描所需的时间,这就得到了整个表面的平均声强。表面的声功率可以通过平均声强乘以测量表面的面积计算得到。最后将各局部表面的声功率相加,得到总声功率。详细的扫描方法在国标ISO 9614-2和ISO 9614-3中有描述。
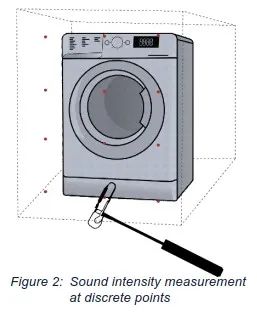
离散点测量法
在进行离散点测量时,将测量面分成若干小单元,每个小单元上通过单点测量确定声强。为方便测量,通常使用线绳来划分网格单元,这样可以保证测量点到声源的距离以及各测点之间的距离。每个测量点的声强做时间平均,然后乘以面元面积得到该面元的声功率。总声功率由所有面元声功率相加得到。国标ISO 9614-1描述了离散点声强测量的细节。
两种方法的优缺点
这两种测量方法各有利弊,哪种方法更合适取决于具体的测量应用。理论上,连续扫描法测点更多,因此通常能提供更精确的测量结果。但是,这种方法需要一定的经验,例如,需要以恒定的速度移动探头,并均匀扫描整个测量表面。另一方面,离散点测量方法通常更容易实现,并且可以更好地保证结果的一致性。
背景噪声的影响
声强法测定声功率的主要优点之一是稳态、非相干背景噪声不会对测量结果造成影响。在声强测量中,背景噪声会对被测物体的一侧产生正的贡献。然而,由于背景噪声会从被测物体另一侧的测量面流出,该一侧的贡献为负。因此,当包络面叠加时,背景噪声的影响将会被抵消。对于背景噪声源不在测量面内的情况,对整个包络面进行积分,理论上可以完全消除背景噪声的影响。当然,这只适用于背景噪声相对恒定且在测量期间没有显著变化的情况。
此外,测量面内的物体不能对背景噪声造成吸声,否则流出部分将明显小于流入部分。因为声压是一个标量,所以基于声压测量的声功率测试不能提供这种补偿,只有借助声强的矢量特征,才能区分正分量和负分量。
2、声强的测定
声强作为一个矢量,包含了能量流的大小和方向。通常需要测量垂直(即以90°角)通过测量面的声强。矢量声强无法直接测量,需要同时测量声压和粒子速度间接得到。
声压和粒子速度
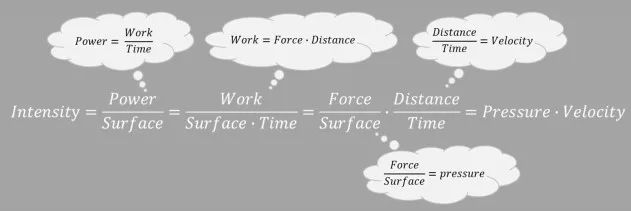
声强是单位面积的时间平均能量流或声功率。在平面波声场中,声强是声压与粒子速度乘积的结果:
(声压和粒子速度的乘积得到瞬时声强,需要在时间上或不同测点间平均得到单值。)使用合适的麦克风可以很容易地记录声压,但粒子速度的测量却相当复杂。
3、粒子速度测量
声强作为一个矢量,包含了能量流的大小和方向。通常需要测量垂直(即以90°角)通过测量面的声强。矢量声强无法直接测量,需要同时测量声压和粒子速度间接得到。
PU探头
有两种类型的探头可用于测量粒子速度。第一种就是所谓的PU探头,可以直接测量得到声压和粒子速度。粒子速度传感器由两根紧挨在一起的非常细的导丝组成,导丝通过电流进行加热。粒子速度会引起两根导丝温度的差异,进而造成导丝电阻的变化,间接测量即可得到粒子速度。同时探头内装有一个麦克风来测量声压。
PP探头
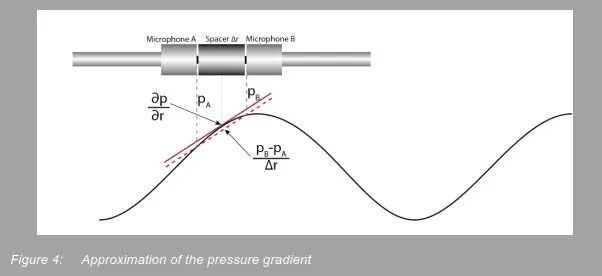
第二种是压力梯度探头,也叫PP探头,通过彼此靠近的两个麦克风来测量声场中两个不同点的声压。两个声压值通过线性近似确定声压梯度,进而通过声压梯度确定粒子速度。
根据声压梯度测定粒子速度
压力梯度是对当前声压在一段距离内变化的度量,可以通过两个距离接近的麦克风进行线性近似:

已知压力梯度,可以通过欧拉方程计算粒子速度。欧拉方程是莱昂哈德·欧拉(Leonhard Euler)建立的数学模型,用来描述无摩擦弹性流体的流动。根据欧拉方程,对于密度为ρ的介质,其速度可以由压力梯度积分得到:

粒子速度计算值适用于A点和B点的中心,即两个麦克风的中心。同时这个位置的声压通过位置A和位置B的声压平均计算得到:
粒子速度与声压乘积的时间平均结果为A点与B点中心的声强 I:

声强既可以在频域也可以在时域中计算得到。
用于测量声压梯度的一对麦克风相位必须高度匹配以保证测量精度。此外,也可以通过相位校准的方法来校正两个传声器的相位差。
PP探头的方向特征
当用PP探头测量声强时,必须考虑探头的方向特性。即使探头使用无指向性麦克风,它记录的声压并不具有方向性,用探头测量的声强也取决于声音到达探头的方向。这是由于声强结果受使用的计算方法和探头设计的影响。当声音从90°方向(相对于两个麦克风的轴线)入射时,两个麦克风同时探测到声压波动,探头两个麦克风之间没有压力差。因此,计算出的粒子速度为零,由此计算出的声强也为零。如果声音入射方向与探头轴线重合(声入射角度为0°),则测量完整的声强。对于其他声入射角度θ,与声音0°入射角相比,声强会以因子cosθ降低,PP声强探头的方向特性也被称为余弦特性。因此,需要匹配麦克风的轴线与测量面法线对齐的方式进行测量。

间隔块
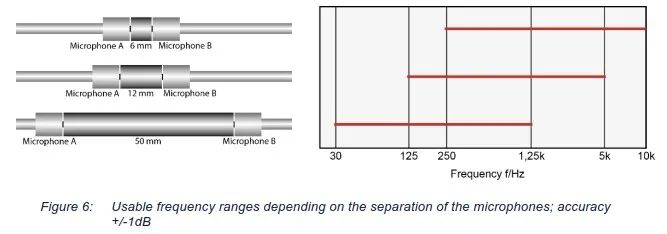
对于大多数PP探头,麦克风以面对面形式组合,两支麦克风通过间隔块隔开。通常探头会附带几个不同长度的间隔块,间隔块的长度影响探头可以记录的频率范围。间隔块越短,截止频率上限越高,间隔块越长,截止频率下限越低。图6显示了三种不同长度间隔块可用频率范围的参考值,实际可用的频率范围还取决于两个匹配麦克风的相位响应程度。此外,通过探头的设计优化,也可能会增大其频率范围 (具体的频率范围参考制造商的技术规格)。
4、声强云图的应用
有针对性地改善声辐射特性
检查一台复杂机器的声辐射特征,定量地确定各个部件的噪声贡献,从而可以采取有针对性的改进措施。比如,可以避免耗时的“trail&error试错”的方法,有针对性地修改对整体发出的声能量贡献最高的部件。因为声强测量可以在原位进行,是一种非常适合用于问题排查的方法。反之,如果要通过声压测量确定一台机器单个部件的贡献,就必须隔绝其他部件,例如通过用隔音材料封装的方法,这在某些应用中几乎是不可能的,或者会使测量变得非常复杂。
声强云图
为了有效地降低噪声,声源的定位和识别就显得尤为重要。声强为声源定位和识别提供了几种方案,使用声强云图,可以在被测对象的图像上通过不同颜色显示声强值。
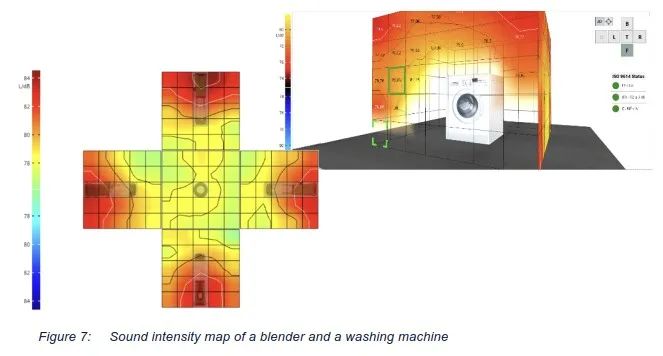
跟声强法测定声功率类似,可以使用测量网格来测量不同等距点的声强,测量值存储并叠加显示在测试对象图像上。通过这种可视化云图,用户可以轻松地识别关键发声部件,有针对性的对其进行优化。也可以在近场进行声强测量,从而提高分辨率和信噪比。
5、测试过程中需要注意的问题
-
在用PP探头测量声强之前,必须对探头麦克风进行幅值和相位校准,只有这样才能保证可用的测量结果。
-
为了获得可靠的结果,测量声强的平均时间必须足够长。可以通过多次测量进行检查,如果多次测量的结果相当,则说明平均时间足够长,如果结果相差较多,则应该增加测量平均时间。
-
为了正确测定声功率,测试过程中必须使声强探头麦克风的轴线垂直于测量面。
-
使用扫描法时,必须注意匀速移动探头扫描整个表面;在使用离散点法测量时,必须保证足够多的测量点数量。
-
测量点的数量由测量面上声强的变化程度决定,变化越多,需要的测量点就越多。
-
测量的背景噪声必须足够平稳。可能的话,可以在实际测试对象不运行时对背景噪声进行测量,进而评估背景噪声的贡献。也可以通过减小测量面,使测量距离更接近测试对象的方式将背景噪声的影响降至最低。
-
间隔块的长度影响探头的频率范围,因此必须针对应用选择合适的间隔块。间隔块越短,截止频率上限越高;间隔块越长,截止频率下限越低。



 广告
广告 编辑推荐




最新资讯
-
东扬精测|CLNB 2026 苏州|世界顶尖的测试
2026-04-03 09:48
-
EA-BIM 20005多通道电池阻抗测试仪如何赋能
2026-04-03 09:46
-
自动泊车测试进入厘米级时代——从最新测试
2026-04-03 09:10
-
真正决定城市体验的,不是硬件,而是控制系
2026-04-02 14:26
-
LabVIEW传奇工程师亲临现场,NI测试测量技
2026-04-02 14:24
