




 广告
广告





















































混合动力汽车的主动减振控制方法分析

摘 要:针对混合动力汽车的主动悬置系统,分析了其主要功能和隔振原理,以及如何利用传感器信号来设计特定的算法,控制驱动电路输出动态电流信号,使电磁作动器产生高频机械振动,以此来叠消由发动机和路面产生的激励信号,阻止力传递至车架甚至驾驶室,同时降低噪声干扰,提高乘坐舒适性。
关键词:混合动力汽车 主动悬置 传感器 减振
大量的理论研究和实验表明,发动机的振动及噪声已成为影响乘坐舒适性的重要因素,其特点是多振源、宽频带、形态复杂。发动机振动主要由发动机气缸内的燃烧与活塞的往复运动所致,该振动可经发动机悬置系统传递至车架,进而传递到驾驶室内,影响乘坐舒适性。削弱甚至消除发动机传递到车架上的振动能有效地解决这一问题,主动悬置系统可利用带有电磁作动器的液压悬置,动态调节悬置的动刚度和阻尼,理论上可以将系统的振动降为“0”。
1 主动悬置隔振原理
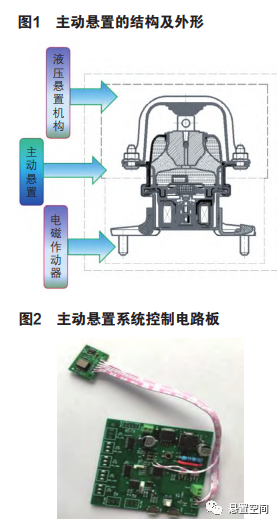
主动悬置系统相比传统的橡胶悬置、纯液压悬置增加了电磁作动器及其电子控制单元,电磁作动器如图 1 所示,电子控制单元的电路板如图 2 所示。电磁作动器是利用永磁铁或电磁铁来产生稳定的磁场,当磁场中线圈有电流通过时产生了和电流成正比的安培力,从而驱动作动器动作,电磁作动器是主动悬置的核心部件,是电控单元对悬置采取主动控制的重要环节。
2 主动减振控制策略
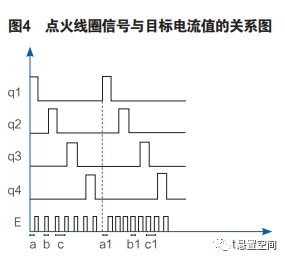
普通悬置做不到理想刚度和阻尼的要求,主动悬置的动刚度和阻尼是可控的,可根据实际激励来输出所需要的刚度和阻尼,理论上可以将系统的振动降为“0”。其基本原理为:通过传感器采集到发动机和路面激励信号反馈给控制电路,使作动器产生一个与之频率和幅值均一样、相位反向的信号从而达到抵消激励信号的目的,控制原理示意图如图 3 所示。
电控单元通过车速与发动机曲轴传感器信号判断出目标工况,并从发动机电子控制单元获取与振动相关的数据,分析出发动机的振动状态,计算电磁作动器的工作电流,并根据动力电池充电功率、发动机点火线圈信号、纵向加速度值对工作电流大小、时序进行多次修正和闭环控制,最终控制主动悬置削弱甚至消除发动机振动传递与噪音。混合动力汽车的主动减振控制方法可按以下 6 个步骤进行。
S101:当混合动力汽车的发动机工作时,获取车速和曲轴传感器信号,并以此判断车辆是否处于怠速充电工况,车速信号用于怠速工况的判断,曲轴传感器信号判断发动机的转速是处于充电工况对应的预设转速区间,二者都满足时即为目标工况。预设转速区间可根据实际情况进行标定,例如预设转速区间可以为 900r/min-2000r/min。
S102:当 S1 判断车辆处于怠速充电工况下时,则根据曲轴传感器信号计算发动机的转速和振动周期。发动机转速等于每分钟曲轴转动的圈数,发动机振动周期可根据发动机的汽缸数和发动机的转速计算获得。以四缸发动机为例,发动机的每个工作循环中曲轴转动两圈,并且每个工作循环中,四个汽缸按照 1342 的顺序点火燃烧各一次,即发动机每转会点火燃烧两次,也就是发动机每转振动两次,如果发动机的转速为 6000r/min,那么它的振动周期为 1/200s。在计算出发动机的转速和振动周期后,可利用采样法获得此时发动机的振幅和频率,通过采样法或查表法等计算获得所需的目标电流值 A;当 S1 判断车辆处于非怠速充电工况下时,则进入其他工况(如加速、减速等)的处理。
S103:当 S1 判断混合动力汽车处于怠速充电工况时,需与整车控制器或者电池管理系统通信以获取动力电池的充电功率。此通信周期远大于发动机的振动周期,为了减少在通信完成后的计算时间,可以设置一个预处理(如步骤 S1-S2),该预处理的作用就是利用通信完成前的时间,预先计算出一个目标电流值 A,并在通信结束后,直接利用该目标电流值 A,从而有效减少通信结束后的计算时间。
S104:由于充电功率会对发动机的振动产生影响,所以还需根据动力电池的充电功率对目标电流值 A 进行调整,以获得第一修正电流值 A’,这样修正后的目标电流值更加符合实际工况。
S105:获取发动机的点火线圈信号,并根据发动机的点火线圈信号判断发动机处于点火状态时,根据第一修正电流值和发动机的点火线圈信号输出带有工作时刻的驱动信号至电磁作动器进行工作电路的驱动。点火线圈信号反映了发动机汽缸内的燃烧时刻,发动机的振动主要产生于点火时刻汽缸内的气体燃烧推动活塞,所以采用点火线圈信号来控制第一修正电流值 A’的输出时刻,抑制振动更为准确和有效。可先根据第一修正电流值 A’和发动机的振动周期,采用脉冲宽度调制控制的方式获取相对应的驱动信号,然后根据点火线圈信号生成驱动用脉冲控制信号,通过该脉冲控制信号决定第一修正电流值 A’输入到作动器的时间。
S106:驱动电路根据驱动信号向作动器输出带有作用时间的工作电流,作动器根据带有作用时间的工作电流进行工作以对混合动力汽车进行主动减振控制。当第一修正电流值 A’输入至作动器时,作动器根据工作电流对自身的电磁感应装置进行调节,实现机械结构的上下运动,从而改变主动悬置的阻尼和动刚度,实现汽车在怠速充电工况下的减振降噪功能,提高用户的乘车舒适度。在实际应用中,还可以通过监测作动器工作温度来适当调整目标电流值,对每个时刻的第一修正电流值的大小进行调整, 消除温度对作动器的影响。由于驱动电路中线圈的电阻会随着温度的升高而增大,所以可以利用驱动电路的输出电流来计算线圈的电阻值,然后根据该电阻值推算出此时作动器的工作温度,最后根据工作温度推算出作动器的工作状态,并根据工作状态对第一修正电流值 A 进行调整,以及根据调整后的电流值
对主动悬置的动刚度进行调整。从而在未产生本次减振效果之前,通过对作动器工作温度的监测,对每个时刻的第一修正电流值的大小进行调整,消除温度对作动器的影响,达到对减振效果进行主动调整的目的,使其具有更好的减振效果。
在对主动悬置动刚度调整后,如果不对减振效果进行监控,则无法判断减振是否有效以及具有怎样的减振效果,而如果能够对减振效果进行监测,并根据当前的减振效果对下一周期的第一修正电流值进行调整,那么所获得的第一修正电流值会更加合理,减振效果会更好。
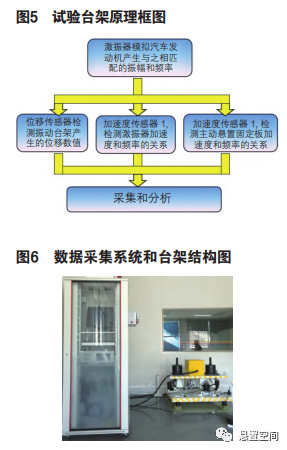
图 4 是某车型四缸发动机的点火线圈信号与目标电流值的关系图。其中,q1 为 1 号汽缸的点火线圈信号,q2 为 3 号汽缸的点火线圈信号,q3 为 4 号汽缸的点火线圈信号,q4 为 2 号汽缸的点火线圈信号,F 为产生目标电流值所需的 PWM 信号,a、a1 分别为修正前后的起始相位差,b、b1 分别为修正前后高电平信号时间长度,c、c1 分别为修前后一个信号周期的时间长度,其中占空比即为 b/c、b1/c1。
以曲轴传感器、点火线圈信号、车速传感器等汽车已经存在的信号作为减振控制的输入信号,信号采集更加便捷有效。并且运用点火线圈信号直接获取减振降噪控制的有效时刻,使得减振控制的作用时间更加准确,减振效果更有效。同时,将驱动电路的工作电流作为输入信号,对目标电流值进行主动调整,并将加速度传感器的信号作为反馈信号,对目标电流值进行闭环控制,可以更好地实现减振降噪控制,达到衰减振动和降低噪声的效果,提高用户的舒适度而且整个控制充分利用了与整车控制器的通信时间,有效减少了通信后的计算时间,使得控制响应速度更快。
3 台架试验方法与数据
此试验台架是模拟某车型发动机重量、安装位置和质心位置,将其边界环境加以简化而设计,用于模拟发动机运行的各工况激励下悬置的隔振情况。台架运行时能产生0-100Hz 的激振力,可模拟四缸发动机 3000转以下各种工况的激励,可做悬置耐久疲劳试验和电路板耐久试验,还可以对控制电路及软件程序进行试验标定及优化。试验台架的原理和结构图如图 5、6 所示。
位移传感器置于主动悬置的被动端,由台架数据采集系统采集和处理被动端位移量,图 7、8 分别是台架试验主动悬置介入和关闭后的振动位移幅值对比。从图中可以看出,主动悬置作动后位移幅值减小了约 50%,当主动悬置不工作时位移幅值增大约一倍。
下述为使用 BBM 数据采集系统进行加速度数据采集和处理,加速度传感器分别放置主动悬置的主动端及被动端,如图 9、10 所示。

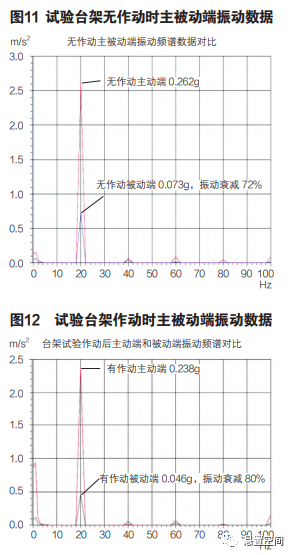
图 11、12 分别是试验台架无作动和有作动两种情况下,主动悬置部作动前后主、被动端振动加速度值对比。从图中可以看出,振动加速度衰减率为 80%,重要的是被动端的振动加速度有效值由 0.073g 衰减到 0.046g,从实际主观感受上隔振效果非常明显。
4 结语
应用以上的主动减振控制方法,并通过搭建试验台架对发动机各工况进行模拟试验,验证了该控制方法可使主动悬置系统削弱 50% 以上的发动机振动传递,阻止不平衡力和噪声向车内传递,可以在主动悬置相关的控制系统当中推广使用。混合动力汽车在市场上还占有着相当大的比例,解决好混合动力汽车在怠速充电工况下的主动减振问题,能够有效提升车辆的舒适性,对车厂和消费者而言都有着重要意义。
作者:吴圣 曹林
作者单位:弗迪科技有限公司 广东省深圳市 518118
来源:新能源汽车



 广告
广告 编辑推荐




最新资讯
-
展会预告 | TCT亚洲展倒计时!思看科技五大
2026-03-10 20:50
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
