




 广告
广告





















































基于意图识别的混合动力汽车控制策略研究

引言
插电式混合动力汽车(PHEV)是介于燃油汽车和电动汽车之间的一种新型混合动力汽车,它不仅可以保持一定距离的纯电驱动,还可以混合驱动提高燃油经济性。混合动力汽车作为一种新的替代交通工具具有巨大的潜力。与传统汽车相比,混合动力汽车燃油经济性更好,另一方面,混合动力汽车的设计和实施提出了许多具有挑战性的问题,特别是能量管理和转矩分配是混合动力电动汽车发展中的两个关键问题。
能量管理策略主要有3大类:
(1)基于规则的算法:秦大同等提出了一种门限值与瞬时优化结合的控制策略。这种方法的基本思想是通过设定阈值参数来限制参数的工作范围,但阈值参数的设定通常依赖于经验,因此不能保证车辆燃油经济性的优化。
(2)智能控制方法:黄禀通等、Meng DW等针对并联式混合动力汽车提出了一种模糊控制策略。吴兵等基于模糊控制模拟驾驶员的动态决策过程。Wang J等创建了基于学习向量量化神经网络的工况识别算法。上述分别采用了模糊控制算法和神经网络算法,这些控制方法不需要建立精确的数学模型,具有自学习、自适应和鲁棒性的优点,可以解决一些复杂的非线性问题。
(3)优化算法:王琳等引入模拟退火和带压缩因子的粒子群算法相结合的优化算法对双电机需求转矩进行分配。耿文冉等通过粒子群算法来进行能量管理策略的多目标优化。金辉等、胡建军等则在能量管理策略中引入自适应动态规划算法。上述粒子群算法和动态规划算法对于寻找最优策略是有用的,但是实时性较差,主要适用于分析和评估其他能量管理策略的效果。
能量管理和转矩分配必须满足驾驶员的意图。目前驾驶员的意图识别大多取决于油门和刹车踏板开度,尹安东等、Shi Y M 等以加速踏板开度和加速踏板开度变化率为参数来识别驾驶员意图,没有考虑当前车辆行驶状态的影响;张利鹏等以平均加速度和加速度均方差作为意图识别的参数,对驾驶员的操作影响考虑较少。作者基于影响因素分析,综合考虑驾驶员操作与当前车辆状态对驾驶意图识别的影响,选择合适的意图识别参数,基于意图识别来制定整车的控制策略,以插电式混合动力汽车为研究对象,以确保整车动力性为前提,以提高能耗经济性为目标,分别针对混合动力汽车驱动意图识别、驱动模式规划、转矩分配优化进行研究,提出基于意图识别的模糊控制策略,并且通过Cruise-Simulink进行联合仿真,验证所提出的控制策略对经济性的改善效果。
1、整车动力系统结构及参数
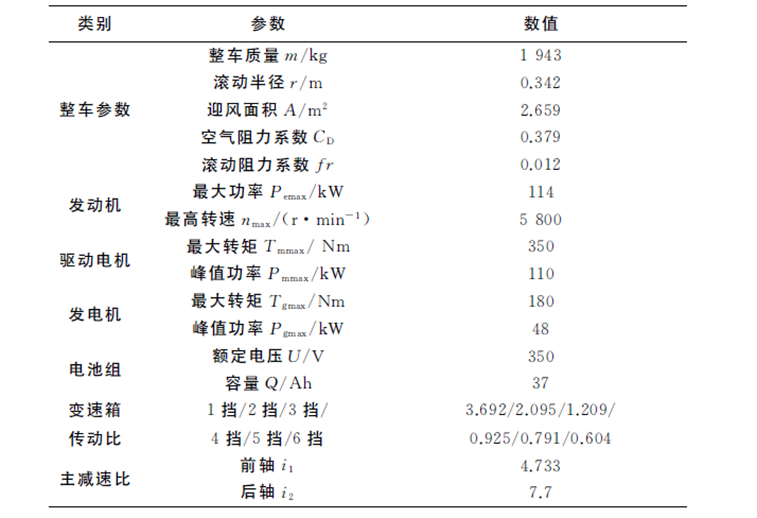
文中研究的是一款混联式混合动力汽车,整车动力系统结构如图1所示。主要部件包括发动机、驱动电机、发电机、离合器、变速箱、减速器、动力电池组等。其中发动机与发电机通过离合器相连,驱动电机经后轴主减速器驱动后轴。动力电池组可通过充电口进行外部充电,向驱动电机提供能量,也可从发电机获取能量。整车参数如表1所示。
2、驾驶意图识别
整车能量管理策略将基于驾驶意图识别结果进行工作模式的划分。所制定能量管理策略的流程图如图2所示,整个过程包含驱动意图识别、驱动模式规划和转矩优化分配3个部分,首先通过识别驾驶员操作和车辆状态,对驾驶意图进行识别,针对当前意图切换对应的工作模式,再合理分配动力源之间的转矩,输出各动力源的目标转矩,实现对发动机、驱动电机和发电机工作状态的控制。

驾驶意图识别就是根据实时采集驾驶员操作信号和汽车运行状态来识别驾驶员当前的驾驶意图,进而以此为依据采用不同的控制策略合理分配动力源转矩。驾驶意图识别不准确会直接影响整车需求转矩计算误差,因此驾驶意图识别的精准性决定了控制策略与驾驶意图匹配的良好性,从而影响到整车安全性及经济性等性能。
在驾驶过程中,驾驶员加速意图的识别很难用精确的数学模型来表示。因此,驾驶员加速意图的识别需要引入鲁棒性强的模糊逻辑识别,因为模糊控制是一种基于人的经验的智能控制方法,在经验处理方面有很大的优势。
首先针对驾驶员驱动意图进行识别,通过对一个行驶循环下各参数的统计分析,选择车速、加速度、加速踏板开度作为驾驶员意图识别参数,也就是模糊逻辑控制器的输入,输出为驾驶员的驱动意图,划分为轻度加速、中度加速和紧急加速。
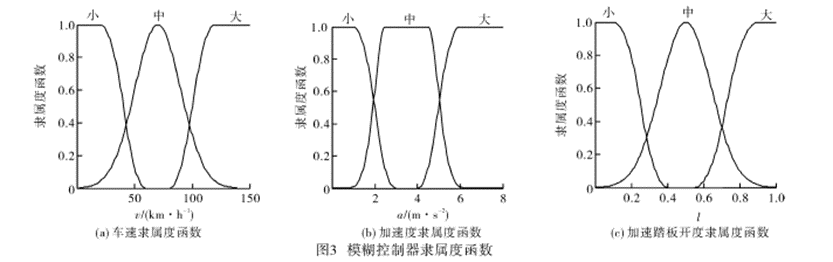
根据混合动力汽车的工作模式以及驾驶员的行为特征,将对应车速v、加速度a 和油门踏板开度l,3个识别参数的模糊子集设置为{S,M,L},S表示车速/加速度/油门踏板开度小,M 表示车速/加速度/油门踏板开度中等,L表示车速/加速度/油门踏板开度大。根据车辆的最高车速和最大加速度指标以及工程经验,即车速和加速度的取值范围,确定车速与加速度经模糊化处理后的论域分别为(0,150)和(0,8);而加速踏板开度的值在0%~100%之间变化,即加速踏板开度的取值范围为(0,1),因此加速踏板开度经模糊化处理后的论域为(0,1)。3个识别参数分别对应的隶属度函数如图3所示。意图识别模糊控制器的输出为一个flag值,对应驾驶员驱动意图紧急程度,分别为平缓驱动、一般驱动与紧急驱动。
模糊控制器的推理规则库是由IF-THEN 语句组成的,IF表示判断条件,THEN 表示输出结果。依据对驾驶员操作经验的总结分析,相同的车速和加速度情况下,加速踏板开度越大,驱动意图越紧急;相同的驱动强度下,当前的车速和加速度越高,驱动的紧急程度越大。由此建立了驾驶员驱动意图的模糊控制规则,如表2所示。
3、能量管理控制策略
3.1 整车工作模式
插电式混合动力汽车有多种工作模式:纯电动模式、发动机单独驱动模式、混合驱动模式、行车充电模式和强制充电模式。当电池电量较高时,一般进入纯电模式,车辆消耗动力电池组中存储的电能来提供动力,只有在驱动电机输出功率不足时,发动机才会介入共同驱动。当电池电量较低时,车辆进入电量维持阶段,发动机工作点通过发电机与驱动电机来调整,优化系统效率。表3是各动力源在不同工作模式下的工作状态。
3.2 驱动模式规划
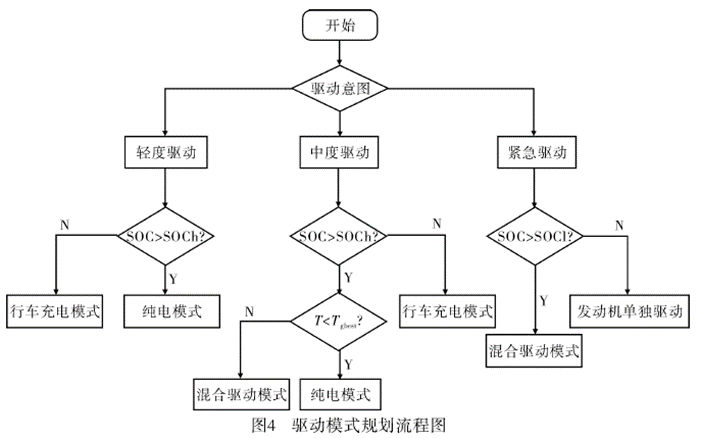
针对此款混合动力汽车,在进行了驾驶员的驱动意图识别之后,对不同的驱动意图进行驱动模式规划,具体流程图如图4所示。总的来说,轻度驱动和中度驱动以经济性为主,紧急驱动以动力性为主。
(1)起步:一般车辆起步特征为车速较低,考虑到发动机此时的效率低,进入纯电动模式。
(2)轻度驱动:为了优化系统效率,使发动机工作在最优区域,可以通过发电机来调整发动机工作点。当最优发动机输出转矩Tgbest大于需求转矩Treq时,若SOC小于目标SOC阈值SOCobj,进入行车充电模式;若SOC大于SOCobj,进入纯电动模式。
(3)中度驱动:发动机工作点通过发电机与驱动电机来调整。当SOC大于SOCobj时,进入纯电动模式;当SOC小于SOCobj时,若最优发动机输出转矩Tgbest大于需求转矩Treq,进入行车充电模式;若Tgbest小于Treq,进入混合驱动模式;若Treq进入最优区域则发动机单独驱动。
(4)紧急驱动:此时驾驶员需求转矩较大,进入混合驱动模式;若SOC已过度放电,则进入发动机单独驱动模式。
3.3 转矩分配策略
当PHEV进入不同的工作模式时,转矩分配策略如下:进入纯电模式时,电机转矩TM=Treq,发动机转矩Te=0;进入行车充电模式时,发动机转矩Te=Tgbest,多余转矩带动发电机进行发电;进入发动机单独驱动模式时,电机转矩TM=0,发动机转矩Te=Treq;进入混合驱动模式时,发动机转矩Te=Tgbest,不足的转矩由驱动电机进行补充。
针对混合驱动模式与行车充电模式,基于规则的策略为使发动机始终在高效区工作,始终让发动机提供最优转矩,发动机工作点通过发电机与驱动电机来调整。对于混合动力汽车的工作过程,控制器设计的基本原则是保持动力电池在平衡状态下充放电,使发动机和电机工作在最高效率范围内,以降低汽车油耗和排放。为提高整车经济性并合理分配转矩,采用模糊控制算法,对发动机、驱动电机和发电机的转矩分配进行优化,使车辆在保证动力性的前提下,提高整车经济性。
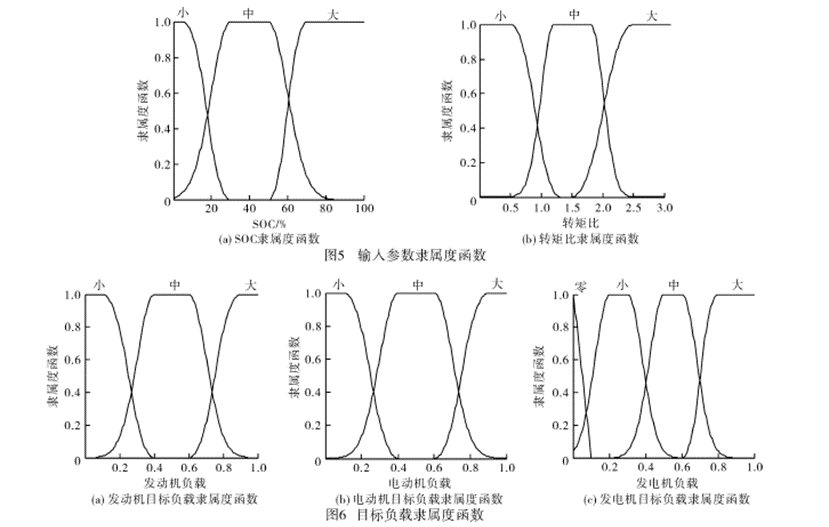
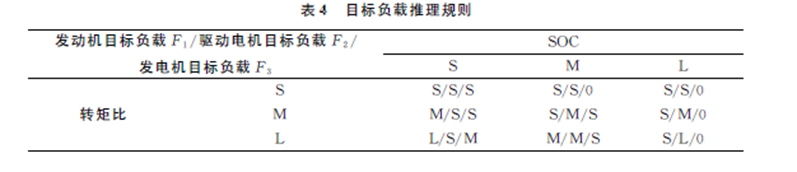
选择SOC、整车需求转矩/当前状态下发动机最大转矩作为输入变量,选择发动机目标负载F1、电动机目标负载F2、发电机目标负载F3 作为输出变量。构建{小S,中 M,大L}模糊子集,SOC经模糊化处理后的模糊化论域为(0,100),整车需求转矩/发动机最大转矩的转矩比经模糊化处理后的模糊化论域为(0,3.1)。SOC和转矩比分别对应的隶属度函数如图5所示。发动机、驱动电机和发电机的目标负载经模糊化处理后的模糊化论域均为(0,1),分别对应的隶属度函数如图6所示。在相同SOC状态下,转矩比越大,对应的发动机和驱动电机目标负载越大;相同的转矩比状态下,SOC越大,驱动电机参与驱动的占比越大;;而在同样转矩比的情况下,SOC较大时,发电机目标负载为0。因此根据上述输入、输出变量模糊化处理后,分别设计发动机目标负载F1、电动机目标负载F2、发电机目标负载F3模糊控制规则如表4所示。
4、仿真对比分析
基于Cruise-Simulink搭建联合仿真平台,研究所提出的控制策略的驾驶意图识别准确性以及对整车能耗的影响。所研究车型为乘用车,选用UDC工况作为仿真工况,查看文中基于驾驶意图识别的模糊控制策略能否准确识别驾驶员意图,并且使车辆实际车速跟随UDC工况设定车速。仿真结果如图7所示。
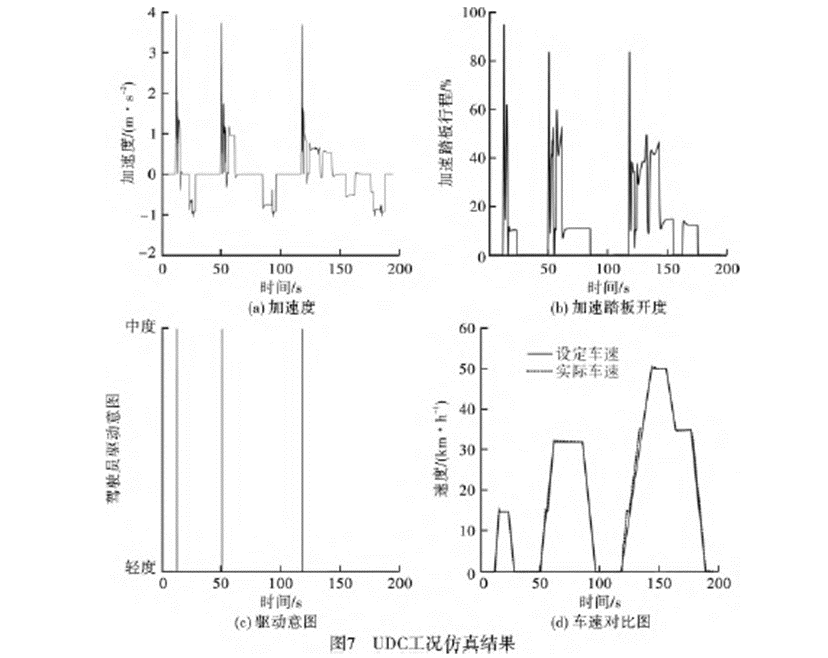
由图7可知,文中设置的控制策略能够根据车速、加速度和油门踏板开度来准确识别车辆的驱动意图,且实际车速跟随效果较好,具有良好的动力性。
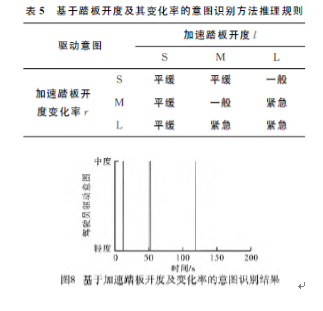
为了证明文中选取的意图识别方法较其他方法更准确可靠,选取加速踏板开度和踏板开度变化率作为识别参数,创建了意图识别模糊控制器来识别同种工况下的驾驶员驱动意图,该方法的推理规则如表5所示,意图识别结果如图8所示。
由图7(C)与图8对比可知,基于加速踏板开度及其变化率指标的意图识别方法,在识别到驾驶员意图变化时,会有连续的跳变,使得汽车模式切换频繁,转矩波动较大,影响汽车的驾驶性与经济性。而文中的意图识别方法,识别结果输出更稳定,避免了转矩输出的波动,在准确识别驾驶意图的前提下,避免了频繁的模式切换,与其他识别方法相比更准确可靠。
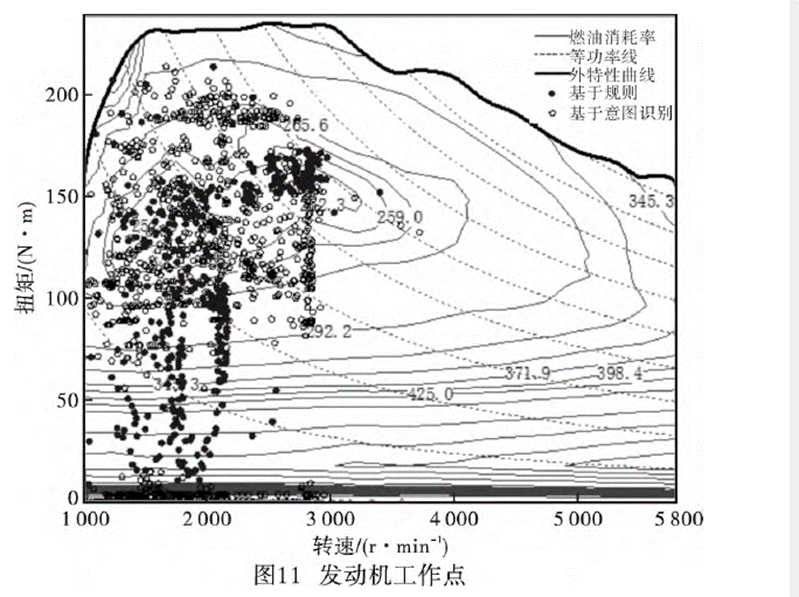
为验证文中PHEV控制策略的经济性,将所提出的控制策略与基于规则的策略进行仿真对比,仿真工况设置为 UDC工况,分别设置蓄电池初始SOC值为20%、90%,对应较低和较高的SOC初始状态,仿真结果如图9、图10所示。低SOC状态下对应的发动机运行工作点如图11所示。
由仿真结果可知,在运行一次UDC循环工况下,初始SOC为90%时,基于规则的控制策略和基于意图识别的模糊控制策略在驱动过程中均控制驱动电机输出转矩为整车提供动力。初始SOC为20%时,驱动模式根据需求转矩的大小进行切换。对于基于规则的策略,为了使发动机一直工作在最优区域内,在不同的转矩需求下,发动机的工作点通过驱动电机或发电机来调节;对于基于意图识别的模糊控制策略,根据意图识别的结果进行驱动模式划分,发动机、驱动电机和发电机的输出转矩通过模糊控制来调节分配。
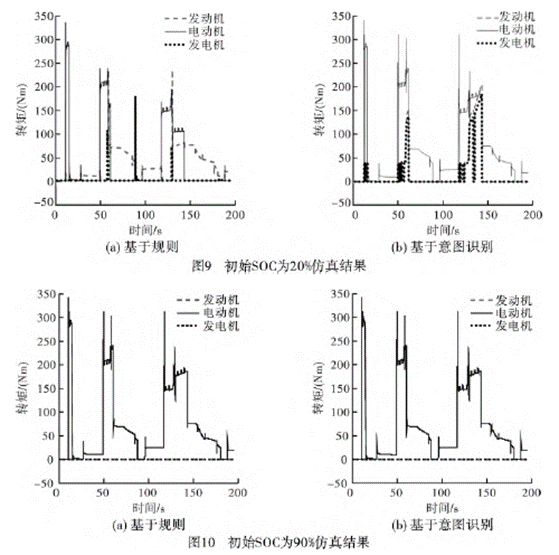
由图9对比可以看出,在低 SOC状态下,基于规则的控制策略中,发动机参与驱动的时间很多,停机再启动的次数也较多,使得汽车模糊切换较频繁,发动机不能经常在高效区工作。而基于意图识别的模糊控制策略中发动机的启动次数较基于规则的少,避免了发动机的频繁启动,一些较低的转矩需求由驱动电机提供,减少了发动机在低效率区间工作的时间。由图10可以看出,在高SOC状态下,汽车处于纯电模式,输出转矩全部由驱动电机提供。由图11可以看出,基于意图识别策略的发动机工作点与基于规则的相比,基于规则策略的发动机工作点较分散,而基于意图识别策略的发动机工作点更集中在经济区,工作点跳变情况得到了改善,验证了所提策略的优化效果。
为验证基于规则策略与基于意图识别的模糊控制策略的整车能耗,确定驱动系统消耗能量公式如下

式中,J 为总费用;Q1 为总燃油消耗量;Y1 为燃油价格,取7元/L;ρ 为汽油密度,取750g/L;Q2 为耗电量;Y2 为电价,取1元/(kWh)。
设置初始SOC为50%,仿真工况为 UDC循环工况,两种策略整车的油电综合能耗对比如表6所示。

根据两种策略方案的整车能耗对比结果可知,与基于规则的控制策略相比,基于意图识别的模糊控制策略总能耗更低,整车综合能耗降低了3.6%,具有更好的经济性。
5、结论
a.利用模糊控制器建立意图识别模块,通过判断驾驶员的驱动意图来更精确地划分需求扭矩的大小,从而使模式切换更准确。仿真结果证实提出的意图识别方法能准确识别驾驶员的驱动意图,并能够根据不同SOC状态和驾驶员当前意图切换至相对应的工作模式,且与其他意图识别方法相比更准确可靠,减少了转矩的波动和模式切换次数,有利于提高汽车驾驶性与经济性。
b.针对插电式混合动力汽车,以提高能耗经济性为目标,引入了模糊控制算法来优化发动机和驱动电机与发电机之间的转矩分配,仿真结果表明,所提出的基于模糊控制的转矩分配方法能够合理地分配各动力源之间的转矩,且发动机工作点更多地落在了效率较高的区域,工作点跳变情况得到了改善。
C.通过Cruise-Simulink联合仿真,验证所提出的基于意图识别的模糊控制策略的经济性。仿真结果表明,与基于规则的控制策略相比,提出的控制策略不仅具有良好的动力性,而且使整车综合能耗降低了3.6%,整车经济性得到了显著提高。
- 下一篇:一文看懂汽车算力芯片行业
- 上一篇:新能源车充电桩电磁兼容测试标准与要求



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
