




 广告
广告





















































BEVFusion: 基于统一BEV表征的多任务多传感器融合

arXiv上传于2022年5月26日论文“BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird’s-Eye View Representation“,来自MIT韩松团队的工作报告(注:NeurIPS会议投稿格式?)。
前不久介绍过一篇BEV多传感器融合的目标检测工作:“FUTR3D,一个统一的传感器融合3D检测框架“
黄浴:FUTR3D,一个统一的传感器融合3D检测框架zhuanlan.zhihu.com
还有6月将召开的CVPR‘22上报告的传感器融合工作 TransFusion (注:是在图像平面的特征融合,不是在BEV)
花椒壳壳:3D目标检测 |TransFusion| 室外| 多模态|CVPR2022zhuanlan.zhihu.com
将多传感器融合对于准确可靠的自动驾驶系统至关重要。最近提出的方法基于点级(point-level)融合:使用摄像头特征增强激光雷达点云。然而,摄像头到激光雷达的投影丢弃了摄像头特征的语义密度(semantic density),阻碍了此类方法的有效性,尤其是对于面向语义的任务(如3D场景分割)。
本文提出的BEVFusion是一种多任务多传感器融合框架,其统一BEV表征空间中的多模态特征,很好地保留了几何和语义信息。为实现这一点,优化BEV池化,诊断并解除视图转换中的关键效率瓶颈,将延迟减少了40倍。BEVFusion从根本上来说是任务无关的,无缝支持不同的3D感知任务,几乎没有架构的更改。
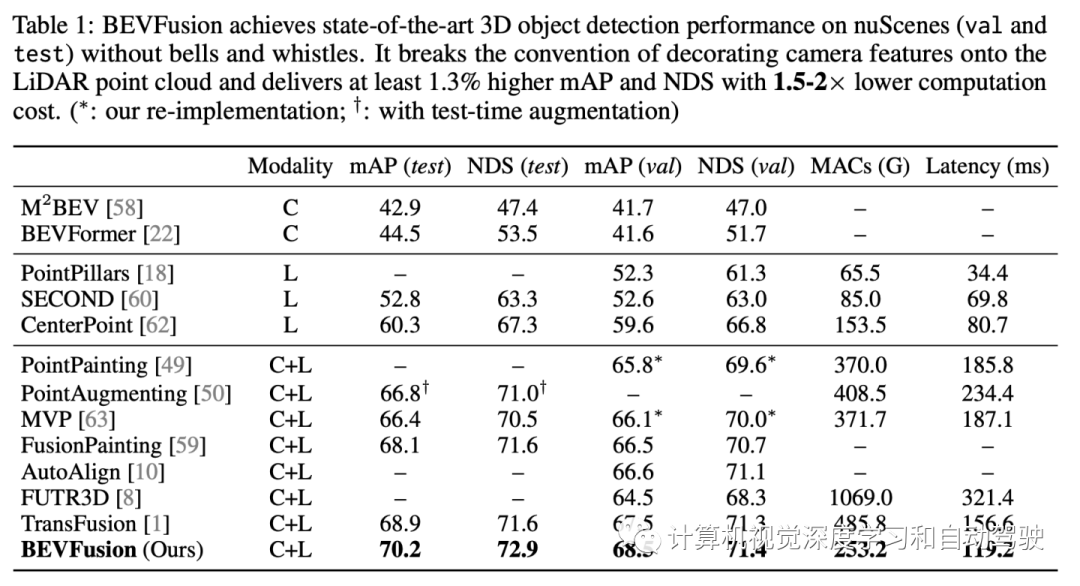
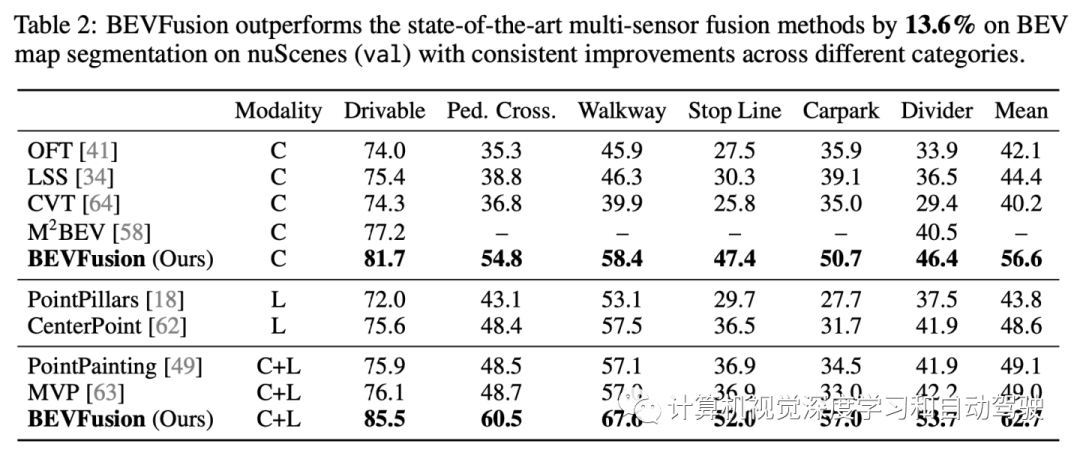
在nuScenes数据集的3D目标检测上实现1.3%的mAP和NDS提升,在BEV分割上实现了13.6%的mIoU提升,计算成本降低了1.9倍。代码将开源 https://github.com/mit-han-lab/bevfusion
自动驾驶系统配备了各种传感器。例如,Waymo的自动驾驶车辆有29个摄像头、6个雷达和5个激光雷达。不同的传感器提供互补信号:例如,摄像头捕捉丰富的语义信息,激光雷达提供精确的空间信息,而雷达提供即时速度估计。因此,多传感器融合对于准确可靠的感知具有重要意义。
来自不同传感器的数据以根本不同的方式表征:例如,摄像头在透视图中捕获数据,激光雷达在3D视图中捕获数据。为了解决这种视图差异,必须找到一种适用于多任务多模态特征融合的统一表征。由于在2D感知方面取得了巨大成功,自然的想法是将激光雷达点云投影到摄像头图像平面上,并使用2D CNN处理RGB-D数据。然而,这种激光雷达到摄像头的投影引入了严重的几何畸变,对于面向几何的任务(如3D目标识别)的效率较低。
最近的传感器融合方法遵循了另一个方向,用语义标注、CNN特征或2D图像中的虚拟点(virtual points)来增强激光雷达点云,然后应用现有基于激光雷达的检测器预测3D边框。尽管这些点级融合方法在大规模检测基准上表现出了卓越的性能,但几乎不适用于面向语义的任务,如BEV地图分割。这是因为摄像头到激光雷达的投影在语义上是有损的,而BEB Fusion就是想避免这个几何和语义的损失,建立BEV特征的融合表征,实现3D语义任务。
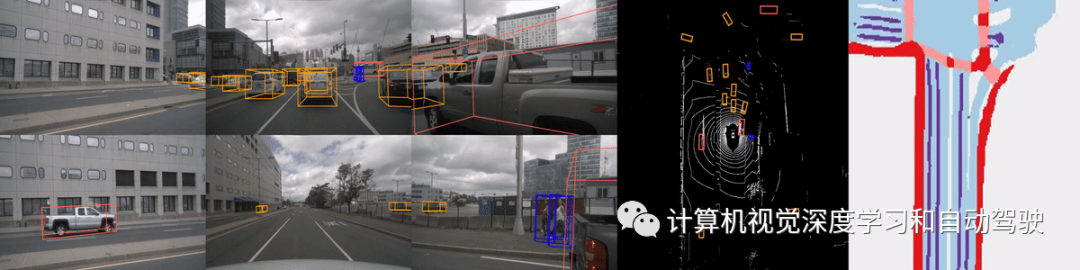
如图所示:对于典型的32线激光雷达扫描,只有5%的摄像头特征与激光雷达点匹配,而其他所有特征都将被删除。对于更稀疏的激光雷达(或成像雷达),这种密度差异将变得更加剧烈。

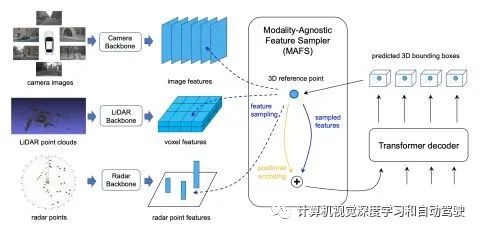
近年来,多传感器融合方法可分为提议级(proposal level)融合和点级融合方法。早期方法MV3D在3D中创建目标提议,并将其投影到图像以提取RoI特征。F-PointNet、F-ConvNet和CenterFusion都将图像提议提升到3D平截体(frustum)中。最近的工作FUTR3D和TransFusion定义了3D空间中的目标查询,并将图像特征融合到这些提议中。所有提议级融合方法都是以目标为中心的,不能简单地推广到其他任务,如BEV地图分割。
另一方面,点级融合方法通常将图像语义特征绘制到前景FG激光雷达点上,并在修饰的(decorated)点云输入上做基于激光雷达的检测。因此,它们既以目标为中心,又以几何为中心。其中,PointPaint、PointAugmenting、MVP、FusionPaint和AutoAlign是(激光雷达)输入级修饰,而Deep Continuous Fusion和DeepFusion是特征级修饰。
多任务CNN在2D计算机视觉领域也得到了很好的研究,包括联合目标检测、实例分割、姿势估计和人机交互。最近同时出现的研究M2BEV和BEVFormer,联合执行3D目标检测和BEV分割。上述方法均未考虑多传感器融合。MMF同时使用摄像头和激光雷达输入进行深度图补全和目标检测,但仍然以目标为中心,不适用于BEV地图分割。
如图所示是BEVFusion流水线概览:给定不同的感知输入,首先应用特定于模态的编码器来提取其特征;将多模态特征转换为一个统一的BEV表征,其同时保留几何和语义信息;存在的视图转换效率瓶颈,可以通过预计算和间歇降低来加速BEV池化过程;然后,将基于卷积的BEV编码器应用到统一的BEV特征中,以缓解不同特征之间的局部偏准;最后,添加一些特定任务头支持不同的3D场景理解工作。

本文采用BEV作为融合的统一表征,该视图对几乎所有感知任务都很友好,因为输出空间也在BEV。更重要的是,到BEV的转换同时保持了几何结构(来自激光雷达特征)和语义密度(来自摄像头特征)。一方面,LiDAR到BEV投影将稀疏LiDAR特征沿高度维度(height dimension)展平,因此不会产生几何失真。另一方面,摄像头到BEV投影将每个摄像头特征像素投射回3D空间的一条光线中(ray casting),这可以生成密集的BEV特征图,并保留了摄像头的全部语义信息。
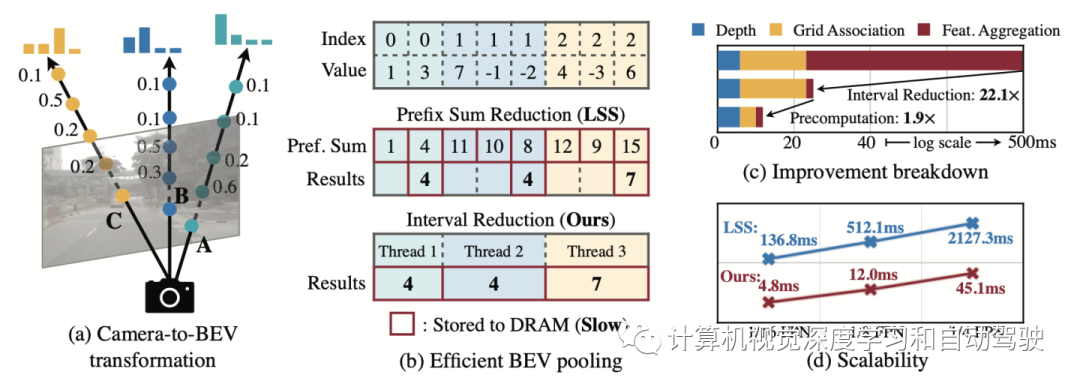
摄像头到BEV的变换非常重要,因为与每个摄像头图像特征像素关联的深度(depth)本质上是不明确的。根据LSS,明确预测每个像素的离散深度分布。然后,沿着摄像头光线将每个特征像素分散成D个离散点,并根据相应的深度概率重缩放(rescale)相关特征。这将生成大小为N*H*W*D的摄像头特征点云,其中N是摄像头数,(H,W)是摄像头特征图大小。此类3D特征点云沿x、y轴量化,步长为r(例如,0.4m)。用BEV池化操作来聚合每个r×r BEV网格内的所有特征,并沿z轴展平特征。
虽然简单,但BEV池化的效率和速度惊人地低,在RTX 3090 GPU上需要500毫秒以上(而模型的其余部分计算只需要100毫秒左右)。这是因为摄像头特征点云非常大,即典型的工作负载,每帧可能生成约200万个点,比激光雷达特征点云密度高两个数量级。为了消除这一效率瓶颈,建议通过预计算和间歇降低来优化BEV池化进程。
如图所示:摄像机到BEV变换(a)是在统一的BEV空间进行传感器融合的关键步骤。然而,现有的实现速度非常慢,单个场景可能需要2秒的时间。文章提出了有效的BEV池化方法(b),通过预计算使间歇降低和加快网格关联,视图转换模块(c,d)的执行速度提高了40倍。
-
预计算
BEV池化的第一步是将摄像头特征点云的每个点与BEV网格相关联。与激光雷达点云不同,摄像头特征点云的坐标是固定的(只要摄像头内参外参保持不变,通常在适当标定后)。基于此,预计算每个点的3D坐标和BEV网格索引。还有,根据网格索引对所有点进行排序,并记录每个点排名。在推理过程中,只需要根据预计算的排序对所有特征点重排序。这种缓存机制可以将网格关联的延迟从17ms减少到4ms。
-
间歇降低
网格关联后,同一BEV网格的所有点将在张量表征中连续。BEV池化的下一步是通过一些对称函数(例如,平均值、最大值和求和)聚合每个BEV网格内的特征。现有的实现方法首先计算所有点的前缀和(prefix sum),然后减去索引发生变化的边界值。然而,前缀和操作,需要在GPU进行树缩减(tree reduction),并生成许多未使用的部分和(因为只需要边界值),这两种操作都是低效的。为了加速特征聚合,文章里实现一个专门的GPU内核,直接在BEV网格并行化:为每个网格分配一个GPU线程,该线程计算其间歇和(interval sum)并将结果写回。该内核消除输出之间的依赖关系(因此不需要多级树缩减),并避免将部分和写入DRAM,从而将特征聚合的延迟从500ms减少到2ms。
-
小结
通过优化的BEV池化,摄像头到BEV的转换速度提高了40倍:延迟从500ms减少到12ms(仅为模型端到端运行时间的10%),并且可以在不同的分特征辨率之间很好地扩展。在共享BEV表征中,这是统一多模态感知特征的关键促成因素。两项并行化工作也发现了纯摄像头3D检测的这一效率瓶颈。假设均匀深度分布,或截断每个BEV网格内的点,可以近似视图transformer计算。相比之下,该技术在没有任何近似的情况下是精确的,但仍然更快。
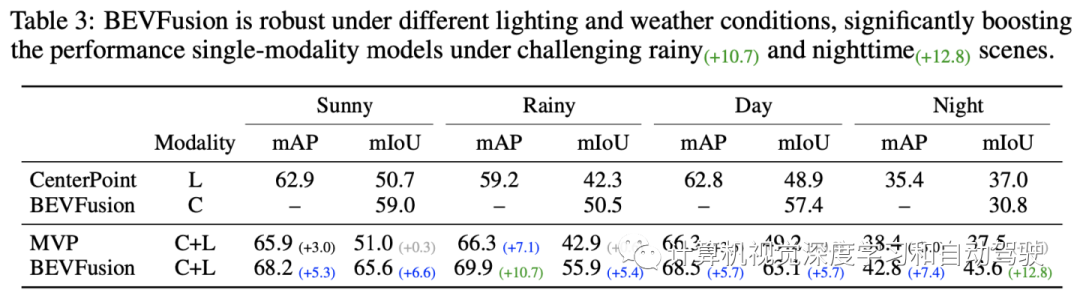
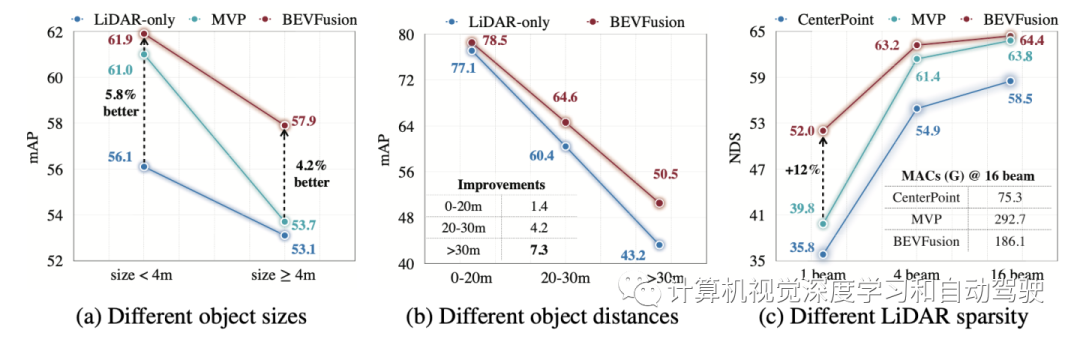
实验结果如下:



 广告
广告 



最新资讯
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
