




 广告
广告





















































汽车试验:车载毫米波雷达测试方法

前言
本文件按照《GB/T1.1-2020标准化工作导则第1部分:标准化文件的结构和起草规则》的规定起草。
请注意本文件的某些内容可能涉及专利。本文件的发布机构不承担识别专利的责任。
本文件由中国汽车工业协会提出并归口。
本文件起草单位:苏州瑞地测控技术有限公司、大联大商贸有限公司、北京凌波微步信息技术有限公司、无锡威孚高科技集团股份有限公司、纳瓦电子(上海)有限公司、工业和信息化部电子第五研究所、威凯检测技术有限公司、四川紫荆花开智能网联汽车科技有限公司、中汽研(天津)汽车工程研究院有限公司、苏州市高铁新城人工智能运营服务有限公司、清华大学苏州汽车研究院、中国计量科学研究院、上海机动车检测认证技术研究中心有限公司、国汽(北京)智能网联汽车研究院有限公司、北汽福田汽车股份有限公司、华域汽车系统股份有限公司、纽励科技(上海)有限公司、江苏智能网联汽车创新中心有限公司。
本文件主要起草人:郑凯、林俊宏、于胜民、屈操、李建林、邓俊泳、陈勇、胡静、刘兴亮、胡坚耀、王佳利、方云青、相刚亮、刘启庆、褚文博、贾瑞亚、吴光智、姚英豪、李韬、徐冲、杜磊、方达龙、李晓强、廉毅、张慧、周景岩、孙志伟、高健军、王诚俊、朱欣恩、季中豪、刘世东、田超、王雷、刘力、曾勇、魏晶、王玉。
1 范围
本标准规定了车载毫米波雷达测试的测试条件、性能测试、发射机测试和电气特性测试。
本标准适用于车载毫米波雷达测试,其它行业的毫米波雷达测试也可以参考使用。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T3784电工术语雷达
ISO 16331-1光学和光学仪器测量和制造仪器的实验室程序第1部分:手持激光测距仪的性能(Optics and optical instruments-Laboratory procedures for testing surveying and construction instruments-Part1:Performanceofhandheldlaserdistancemeters)
3 术语和定义
下列术语和定义适用于本文件。
3.1 毫米波雷达millimeter wave radar module
通过毫米波信号的发送接收,可以完成目标的距离、角度、速度等探测的雷达。
3.2 探测率detection rate
雷达正确探测目标的比例,即毫米波雷达正确探测目标次数与总探测目标次数的比值,通常用百分数表示。
3.3 虚警率false alarm rate
雷达将实际不存在目标探测为一个存在目标的比例,即毫米波雷达的虚假目标探测次数与总探测
目标次数的比值,通常用百分数表示。
3.4 漏检率miss detection rate
雷达未能探测到正确目标的比例,即毫米波雷达未探测到正确目标次数与总探测目标次数的比值,通常用百分数表示。
3.5 探测范围detection coverage
在规定条件下,雷达能够探测目标并测量目标坐标的空间范围。
[来源:GB/T3784一2009,2.2.1.1]
3.6 速度范围range of velocity
雷达能够有效探测目标的速度范围。
3.7 近场nearfield
近场指天线附近的区域。天线四周半径dFF范围以内被称为近场。dFF为近场和远场的边界, 见式(1)。
……………………………………(1)
式中:
dFF ——分界距离:
d1 ——毫米波雷达天线口径;
d2 ——测试设备天线口径;
λ ——测试频率的波长。
3.8 远场farfield
远场指远离天线的区域。天线四周半径dFr范围以外被称为远场。
3.9 带外杂散out-of-band spurious
信号泄露至带宽外的功率。
3.10 距离测量精度range measurement accuracy
单目标的距离变化时,雷达可探测的最小绝对变化距离值。
3.11 距离误差range error
雷达测量目标时,目标距离的测量值与其真值之差的统计值,通常用均方根表示。
3.12 角度测量精度angle measurement accuracy
单目标的角度变化时,雷达可探测的最小绝对变化角度值。
3.13 角度误差angle error
雷达测量目标时,目标角度的测量值与其真值之差的统计值,通常用均方根表示。
3.14 速度测量精度velocity measurement accuracy
单目标的速度变化时,雷达可探测的最小绝对变化速度值。
3.15 速度误差velocity error
雷达测量目标时,目标速度的测量值与其真值之差的统计值,通常用均方根表示。
3.16 距离分辨力range resolution
在规定条件下,雷达能区分同一方位角邻近两个目标的最小距离间隔。
[来源:GB/T3784-2009,2.2.2.6,有修改]
3.17 角度分辨力angle separation
在规定条件下,雷达能区分左右邻近(目标与雷达距离相等的圆弧)两个目标的最小角度间隔。
[来源:GB/T3784-2009,2.2.2.6,有修改]
3.18 标定基准系统verification system
标定基准系统是指用于标定目标与被测雷达之间的距离、角度和速度的系统。
4 测试条件
4.1 测试环境
测试的环境温度及湿度应满足下述范围:
a) 温度:-40℃~+55℃;
b) 相对湿度:20%~75%;
c) 电磁兼容:具有电磁兼容性,测试设备泄漏的电磁能量应在产品规范规定的范围。
4.2 电源
测试的直流电源应满足下述范围:
a)电压:6V~32V;
b)电流:不小于1A;
c)功率:不小于20w。
4.3 测试目标
4.3.1 通常不同的测试要求适配不同的测试目标,测试目标分类如下:
a) 雷达散射截面(RCS) 为5dbsm的球反射器, 见附录A;
b) RCS为5dbsm的雷达目标模拟器。
4.3.2 根据雷达目标模拟器和实际场地的限制将测试场地划分为不同区域,见图1。

说明:
l1——雷达目标模拟器的最小模拟距离;
l2——实际场地的最大距离。
图1 测试场地区域划分
4.3.3 测试环境和目标的选取如下:
a) 当目标与雷达距离小于l1时,目标选择球反射器;
b) 当目标与雷达距离大于l2时,目标选择雷达目标模拟器;
c) 当目标与雷达距离位于l1、l2之间时,目标根据实际测试要求选择。
4.3.4 测试区域范围应大于待测雷达的探测范围。
4.3.5 标定基准系统误差应优于被测雷达预期误差的20%。
[来源:ISO 16331-1-2017, 6.2.2.4]
5 性能测试
5.1 探测范围
5.1.1 测试要求
探测范围测试要求如下:
a) 目标距离范围为0m~400m,速度范围为径向逼近雷达100m/s至径向远离雷达100m/s,角度范围为-90°~90°;
b) 待测雷达对目标的探测率应满足其产品规范,若无明确产品规范,则需在测试要求中明确所采用的探测率。
5.1.2 测试方法
探测范围测试方法如下:
a) 目标区域的角度范围为1.2A~1.2A*,A为产品规范规定的待测雷达的最小探测角度,A*为产品规范规定的待测雷达的最大探测角度,目标区域的距离范围为0.8Rθ~1.2Rθ,Rθ为产品规范规定的待测雷达在角度θ时的最大探测距离。
b) 在目标区域内,确定目标与雷达间的角度θ,确定目标在角度θ时的距离范围,目标在目标区域内径向远离雷达,目标每隔0.1m,保持该状态3s,等待雷达探测目标,直至找到角度θ下雷达的最大探测距离,在目标区域的角度范围中的每一度都重复上述步骤。
c) 最终每个角度的最大距离围成的一片封闭区域即为雷达的探测范围。
5.2 探测速度范围
5.2.1 测试要求
探测速度范围测试要求如下:
a) 目标距离范围为0m~400m,速度范围为径向逼近雷达100m/s至径向远离雷达100m/s,角度范围为-90°~90°;
b) 待测雷达对目标的探测率应满足其产品规范。
5.2.2 测试方法
探测速度按照以下方法进行测试:
a) 目标固定于待测雷达法线方向并且位于待测雷达探测范围内,待测雷达对准目标中心,目标在径向远离雷达方向的速度从零逐渐增大,速度每增大1m/s,保持该状态3s,等待雷达探测目标,直至确定待测雷达的目标径向远离速度并记录;
b) 目标在径向逼近雷达方向的速度从零逐渐增大,速度每增大1m/s,保持该状态3s,等待雷达探测目标,直至确定待测雷达的目标径向逼近速度并记录;
c) 最终记录的径向逼近速度至径向远离速度即待测雷达探测速度范围。
5.3 多目标分辨能力
5.3.1 测试要求
多目标分辨能力的测试要求如下:
a) 目标距离范围为0m~400m,速度范围为径向逼近雷达100m/s至径向远离雷达100m/s,角度范围为-90°~90°;
b)待测雷达对目标的探测率应满足其产品规范。
5.3.2 测试方法
5.3.2.1 距离分辨力测试方法
目标A和目标B的RCS值相同, 目标A、目标B位于待测雷达的相同径向角度方向上, 目标A与待测雷达位于同一水平面,目标B高于此水平面1m,目标A与待测雷达相距l3,目标A位于待测雷达和目标B之间,目标A与目标B之间的水平间距为1.2Rs,Rs为待测雷达产品规范中的距离分辨力值,具体测试场景如图2所示。
距离分辨力分为以下两种工况进行测试:
a) l3=30m;
b) l3=80m。
不断缩小目标A、B之间的水平距离,使待测雷达能同时探测到目标A和目标B,最终记录的最小间距即为待测雷达在该l3距离下的距离分辨力。
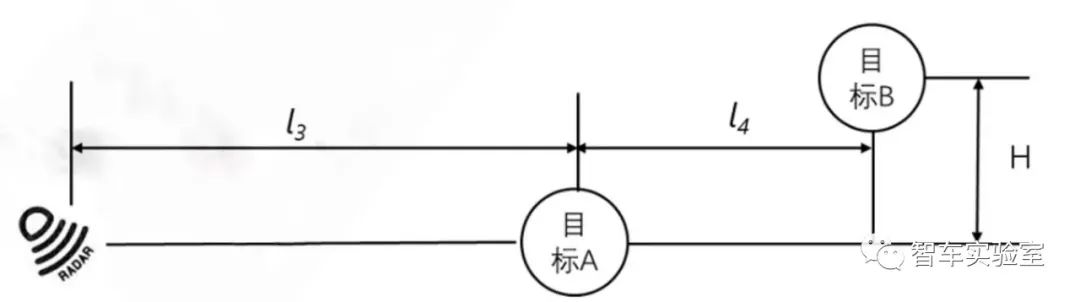
说明:
l4 ——目标A与目标B之间的水平间距;
H ——目标B的高度1m。
图2 距离分辨力
5.3.2.2 角度分辨力测试方法
角度分辨力分为以下三种工况进行测试:
a) C点距待测雷达30m,且位于待测雷达法线方向,见图3所示;
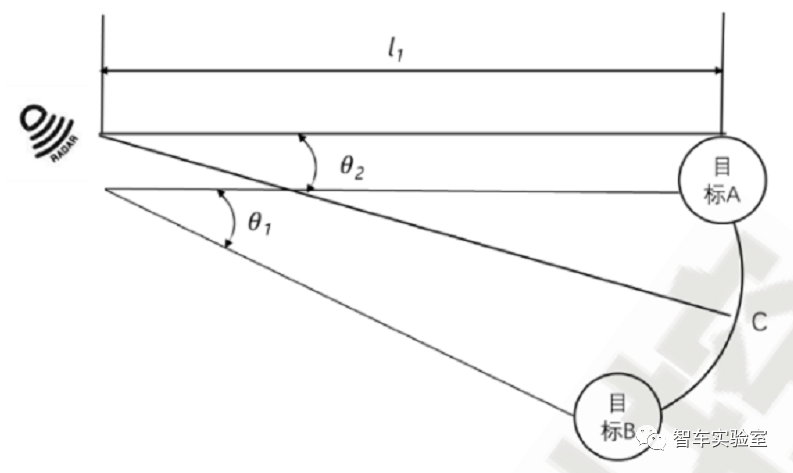
b) C点距待测雷达30m, 且与待测雷达间的角度为0.5θmax(θmax为待测雷达的最大探测角度) ,见图4所示;
c) C点距待测雷达30m, 且与待测雷达间的角度为0.5θmin(θmi为待测雷达的最小探测角度) ,见图5所示。
目标A和目标B的RCS值相同, 分别位于点C的两侧, 目标A和目标B距待测雷达都为30m,具体测试场景如图3、图4、图5所示。以待测雷达为圆心,30m为半径作弧,目标A和目标B在该弧线上运动,但始终在C点两侧,不断调整目标A和目标B间的夹角,使待测雷达能同时探测到目标A和目标B,最终记录的最小夹角即为待测雷达的在该C点角度下的角度分辨力。
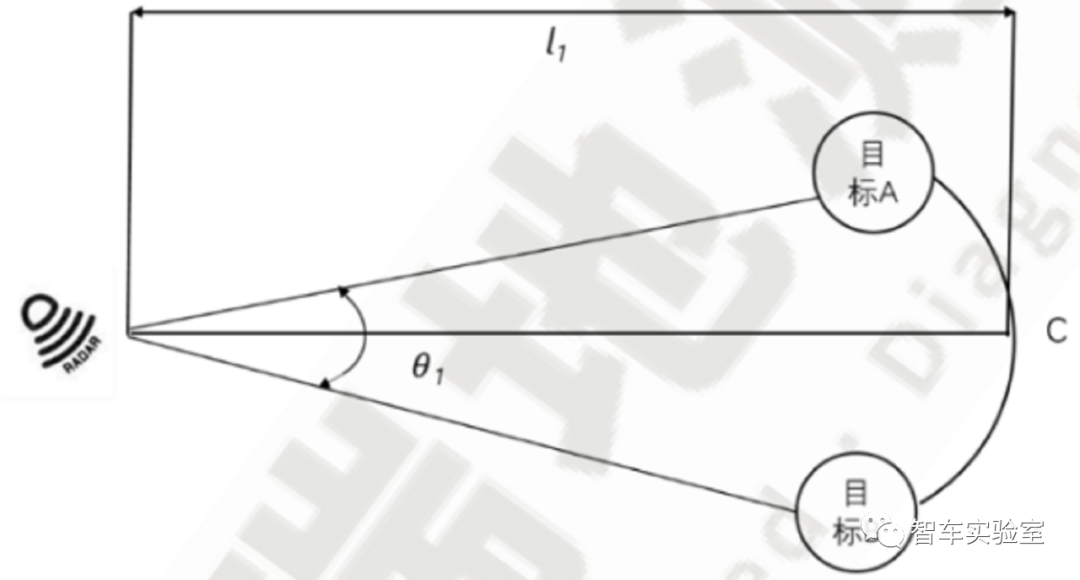
说明:
l1 ——点C与雷达间的距离30m;
θ1 ——目标A与目标B之间的角度,单位为度(°)。
图3 角度分辨力工况一

说明:
l1 ——点C与雷达间的距离30m;
θ1 ——目标A与目标B之间的角度,单位为度(°)。
θ2 ——点C与雷达之间的角度0.5θmax。
图4 角度分辨力工况二
说明:
l1 ——点C与雷达间的距离30m;
θ1 ——目标A与目标B之间的角度,单位为度(°);
θ2 ——点C与雷达之间的角度0.5θmin。
图5 角度分辨力工况三
5.4 测量精度和误差
5.4.1 测试要求
测量精度和误差测试要求如下:
a) 目标距离范围为0m~400m,速度范围为径向逼近雷达100m/s至径向远离雷达100m/s,角度范围为-90°~90°;
b) 待测雷达对目标的探测率应满足其产品规范。
5.4.2 测试方法
5.4.2.1 距离测量精度测试方法
在待测雷达法线方向放置一个目标,确保目标距离在待测雷达测距范围内,待测雷达对准目标中心,
目标沿待测雷达法线方向移动,每次移动1m,目标移动10次。如图6所示。待测雷达每次探测距离值为Di,目标未移动时的初始探测距离为D0,目标第一次移动后的探测距离为D1,目标第二次移动后的探测距离为D2, 以此类推, 目标第十次移动后的探测距离为D10, 待测雷达的距离测量精度见式(2) 。

式中:
△di ——目标移动距离差,△di=i;
△Di ——待测雷达探测距离差, △Di=Di-D0;
Rs ——待测雷达的距离测量精度。
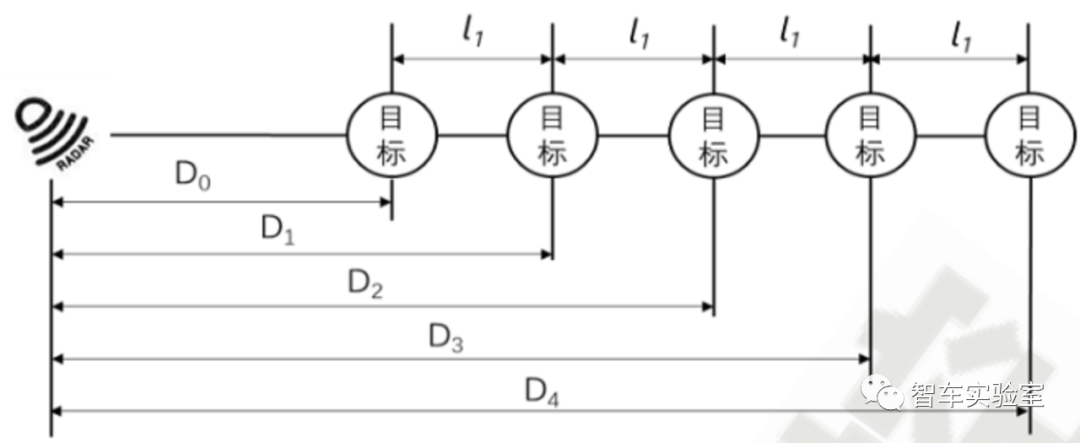
说明:
l1 ——目标移动距离1m
D0 ——目标未移动时的初始探测距离,单位为米(m);
D1 ——目标第一次移动后的探测距离,单位为米(m);
D2 ——目标第二次移动后的探测距离,单位为米(m);
D3 ——目标第三次移动后的探测距离,单位为米(m);
D4 ——目标第四次移动后的探测距离,单位为米(m)。
图6 距离测量精度
5.4.2.2 距离误差测试方法
在待测雷达法线方向上选取P1至P10十个点放置目标,如图7所示,待测雷达对准目标的中心,十点逐一测距。选取点与待测雷达间的距离参考表1。

图7 距离误差
表1 足距离选取点

待测雷达距离误差计算方法见公式(3)。

式中:
Re ——距离误差;
Ri ——目标至待测雷达的距离;
Ri﹡ ——待测雷达的距离探测值。
5.4.2.3 角度测量精度测试方法
5.4.2.3.1 目标移动法
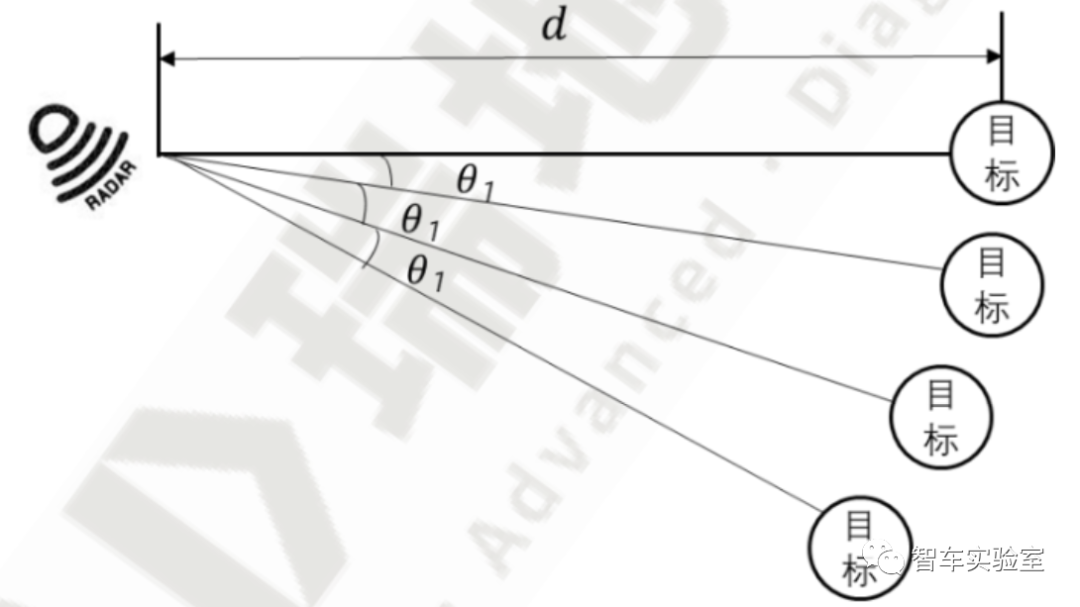
以待测雷达为原点,待测雷达正向法线左侧角度为负,正向法线右侧角度为正,建立坐标系。在待测雷达法线方向放置一个目标,待测雷达对准目标中心,目标与待测雷达相距d,以d为半径,待测雷达为圆心作圆弧,目标沿该圆弧一个方向运动,目标始终位于待测雷达探测范围内,每次角度改变1°,目标移动10次,如图8所示。
说明:
d ——目标与雷达间的距离,单位为米(m);
θ1 ——目标改变角度1°。
图8 目标移动法
5.4.2.3.2 待测件旋转法
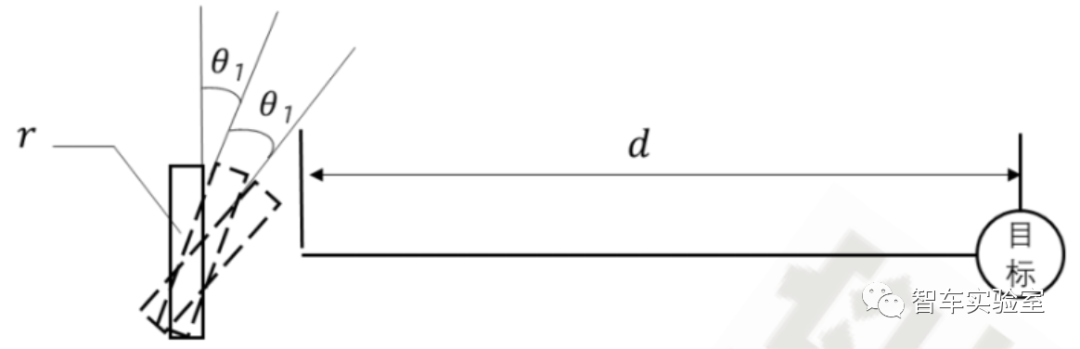
将待测雷达和夹具安装于转台上,以待测雷达为原点,待测雷达正向法线左侧角度为负,正向法线右侧角度为正,建立坐标系。在待测雷达法线方向放置一个目标,待测雷达对准目标中心且初始角度为0°。通过转台软件控制转台,使雷达沿一个方向进行旋转,每次角度改变1°,记录上位机上显示的目标角度,雷达旋转10次,如图9所示。转台的转动角度范围应高于雷达设计指标范围。
说明:
r ——待测雷达;
d ——目标与雷达间的距离单位为米(m);
θ1 ——目标改变角度1°。
图9 待测件旋转法
角度测量精度分为以下两种工况进行测试:
a) d=30m;
b) d=80m。
待测雷达每次探测角度值为Фi,目标在法线方向上的探测角度值为Ф0,目标第一次移动/雷达第一次旋转后的探测角度为Ф1,目标第二次移动/雷达第二次旋转后的探测角度为Ф2,以此类推,目标第十次移动/雷达第十次旋转后的探测角度为Ф10,待测雷达在该距离下的角度测量精度见公式(4)。
式中:
△φi ——目标移动角度差, △φi=i;
△Фi ——待测雷达探测角度差, △Фi=lФi-Ф0l;
As ——待测雷达的角度测量精度。
5.4.2.4 角度误差测试方法
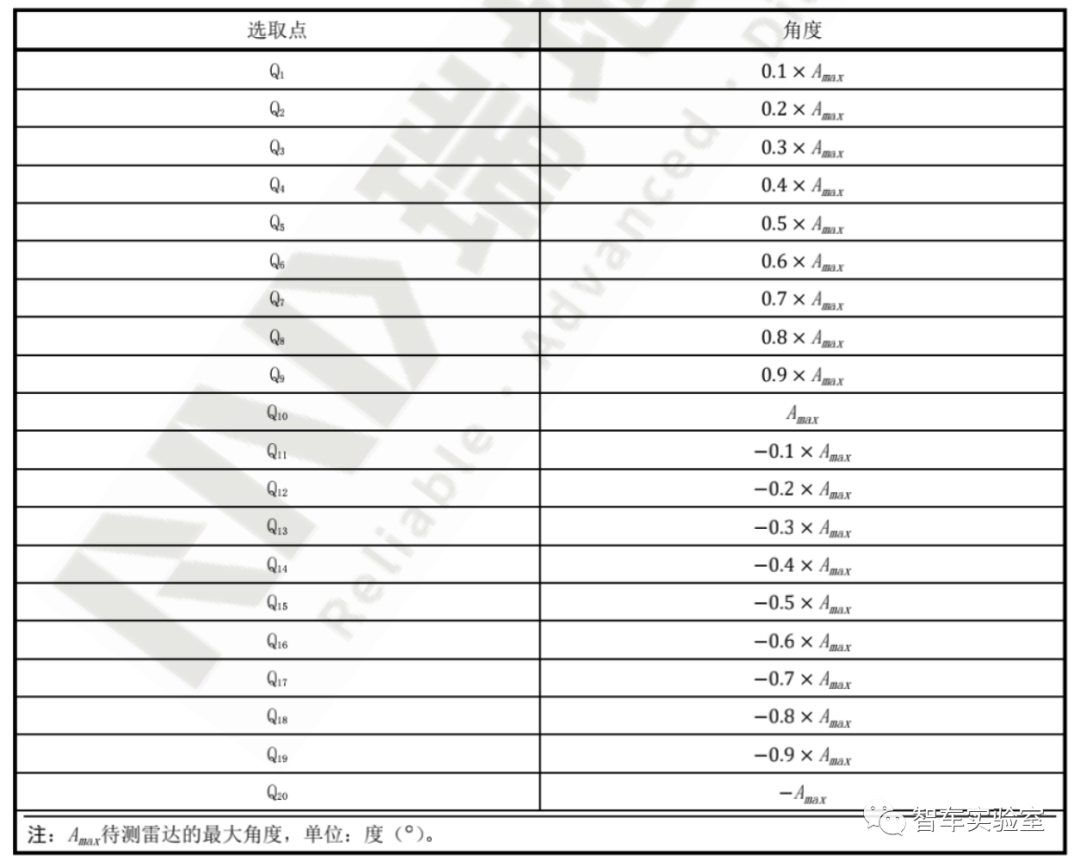
以待测雷达为原点,待测雷达法线左侧角度为负,法线右侧角度为正。在待测雷达探测范围内选取Q1至Q20二十个点放置目标,如图10所示,待测雷达对准目标中心,二十点逐一测角。选取点与待测雷达间的角度参考表2。
待测雷达角度误差见公式(5)。

式中:
Ae ——角度误差;
Ai ——目标至待测雷达的角度;
Ai﹡——待测雷达的角度探测值。
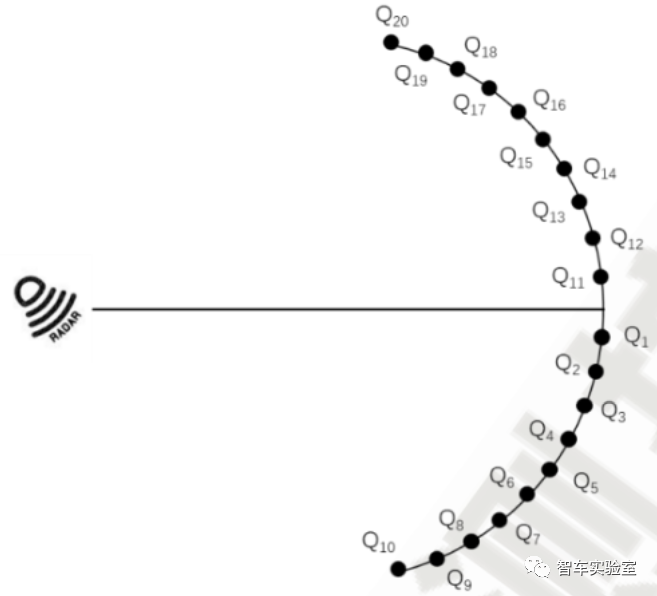
图10 角度误差
表2 角度选取点
5.4.2.5 速度测量精度测试方法
在待测雷达法线方向放置一个目标,确保目标距离在待测雷达测距范围内,如图11所示,待测雷达对准目标中心,改变目标速度,目标速度始终在待测雷达速度范围内,速度每次改变1m/s,速度改变10次,待测雷达每次探测速度值为Si,目标速度未改变时的初始探测速度为S0,目标第一次速度改变后的探测速度为S1,目标第二次速度改变后的探测速度为S2,以此类推,目标第十次速度改变后的探测速度为S10,待测雷达的速度测量精度见公式(6)。

式中:
△Si ——目标改变速度差,△Si=i;
△Si ——待测雷达探测速度差,△Si=Si-So;
Vs ——待测雷达的速度测量精度。

图11 速度测量精度
5.4.2.6 速度误差测试方法
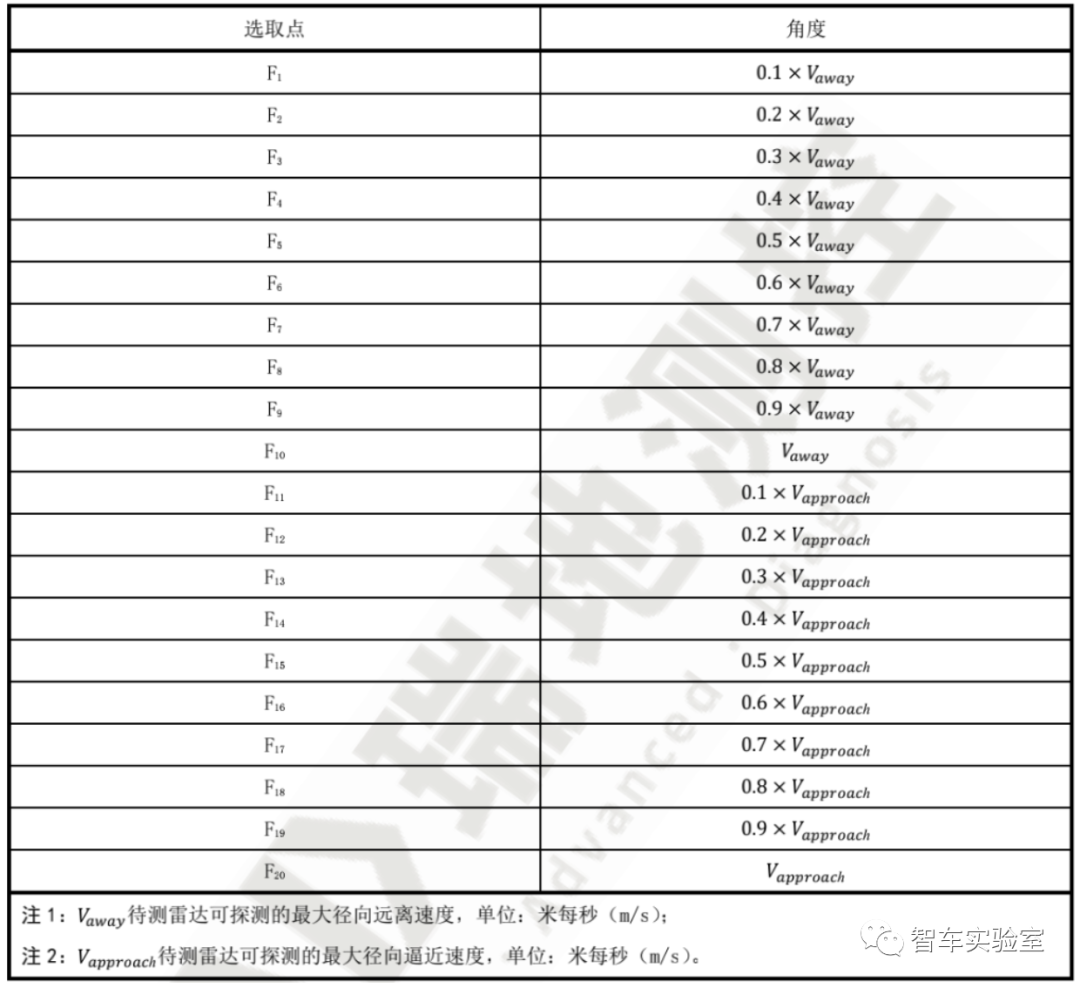
在待测雷达法线方向放置一个目标,确保目标距离在待测雷达测距范围内,如图12所示,待测雷达对准目标中心,选取F1至F20二十个点作为目标速度,二十点逐一测速。选取点与待测雷达间的速度参考表3。
待测雷达速度误差见公式(7)。

式中:
Ve ——速度误差;
Vi ——目标速度;
Vi﹡——待测雷达的速度探测值。
图12 速度误差
表3 速度选取点
5.5 探测率、漏检率
5.5.1 测试要求
目标位于待测雷达探测范围内,目标速度在待测雷达探测速度范围内,待测雷达对准目标中心,按产品规范规定的工作频率和连续工作时间进行探测目标测试,待测雷达应有效探测200次,记录探测结果,除外部原因造成的异常探测结果不计入有效探测次数外,其它情况出现的异常探测结果,均计为有效探测结果次数。每次探测中,若待测雷达探测到正确的目标,则此次探测记为正确,否则将此次探测记为漏检。
5.5.2 测试方法
5.5.2.1 探测率测试方法
探测率按公式(8)计算:
式中:
Pd——探测率;
Nd——待测雷达的正确探测次数。
5.5.2.2 漏检率测试方法
漏检率按公式(9)计算:
式中:
Pm——漏检率;
Nm——待测雷达的漏检次数。
5.6 虚警率
5.6.1 测试要求
待测雷达置于开阔场地或消声暗室中,确保此环境中无任何目标干扰,按产品规范规定的工作频率和连续工作时间进行探测目标测试,待测雷达应有效探测200次,记录探测结果,除外部原因造成的异常探测结果不计入有效探测次数外,其它情况出现的异常探测结果,均计为有效探测结果次数。每次探测中,若待测雷达探测到目标,则此次探测记为虚警。
5.6.2 测试方法
5.6.2.1 探测率测试方法
虚警率按公式(10)计算:

式中:
Pf——虚警率;
Nf——待测雷达的虚警探测次数。
6 发射机测试
6.1 峰值功率
6.1.1 测试环境
本项测试在暗室中进行,暗室符合附录B的规定,测试校准符合附录C的规定。测试设备的接收天线位于待测雷达法线方向5m处。
6.1.2 测试方法
测试方法如下:
a) 校准功率计,并将功率计设为峰值功率模式;
b) 根据待测雷达产品规范中的峰值功率设置功率计相应的量程档;
c) 将待测雷达调至产品规范规定的工作状态;
d) 测试系统工作稳定后,读出功率计指示值,并记录;
e) 功率计读数加上C,即为待测雷达峰值功率值,C。为功率校准参数,其计算方法见附录C。
6.2 平均功率
6.2.1 测试环境
本项测试环境按6.1.1给出的要求搭建。
6.2.2 测试方法
测试方法如下:
a) 校准功率计,并将功率计设为平均功率模式;
b) 根据待测雷达产品规范中的平均功率设置功率计相应的量程档;
c) 将待测雷达调至产品规范规定的工作状态;
d) 测试系统工作稳定后,读出功率计指示值,并记录;
e) 功率计读数加上C,即为待测雷达平均功率值,C。为功率校准参数,其计算方法见附录C。
6.3 发射信号带宽
6.3.1 测试环境
本项测试环境按6.1.1给出的要求搭建。
6.3.2 测试方法
测试方法如下:
a) 校准频谱仪, 频谱仪分辨率带宽设为1MHz,视频测量带宽设为3MHz;
b) 将待测雷达调至产品规范规定的工作状态;
c) 测试系统工作稳定后,读出频谱仪指示值,并记录,频谱仪读数即为待测雷达发射信号带宽值。
6.4 带外杂散
6.4.1 测试环境Re
本项测试环境按6.1.1给出的要求搭建。
6.4.2 测试方法
测试方法如下:
a) 校准频谱仪, 频谱仪分辨率带宽设为1MHz,视频测量带宽设为3MHz;
b) 将待测雷达调至产品规范规定的工作状态;
c) 测试系统工作稳定后,分别读出频谱仪上波形图带宽外左右两侧杂散信号的功率,并记录,频谱仪读数即为待测雷达发射信号左右两侧的带外杂散值。
6.5 发射天线方向图
6.5.1 发射天线水平方向图
6.5.1.1 测试环境
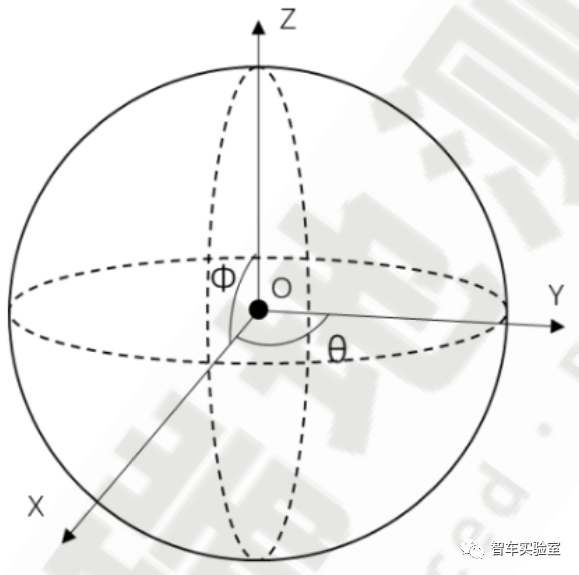
本项测试环境按6.1.1给出的要求搭建。方向图测试中使用的坐标系如图13所示,待测雷达的相位中心位于原点O,X轴、Y轴组成水平面,水平方向角为Фθ,X轴、Z轴组成垂直面,竖直方向角为Ф。
接收天线中心应在X轴正方向上。
说明:
Ф ——X轴与Z轴组成的平面上的角度,单位为度(°);
θ ——X轴与Y轴组成的平面上的角度,单位为度(°)。
图13 坐标系
6.5.1.2 测试方法
测试方法如下:
a) 校准功率计,并将功率计设为平均功率模式;
b) 根据待测雷达产品规范中的平均功率设置功率计相应的量程档;
c) 将待测雷达调至产品规范规定的工作状态;
d) 在水平面内转动待测雷达,根据产品规范设定角度步进,但角度步进不应大于30°,记录接收信号并进行数据处理。
6.5.2 发射天线垂直方向图
6.5.2.1 测试环境
本项测试环境按6.6.1.1给出的要求搭建。
6.5.2.2 测试方法
测试方法如下:
a) 校准功率计,并将功率计设为平均功率模式;
b) 根据待测雷达产品规范中的平均功率设置功率计相应的量程档;
c) 将待测雷达调至产品规范规定的工作状态;
d) 在垂直面内转动待测雷达,根据产品规范设定角度步进,但角度步进不应大于30°,记录接收信号并进行数据处理。
7 电气特性测试
7.1 静默电流
待测雷达处于静默状态,将雷达电源线与数字万用表连接,测得工作电流。
7.2 工作电流
对待测雷达有效输入端供电,使待测雷达处于正常工作状态,将雷达电源线与数字万用表连接,测得工作电流。
7.3 工作电压范围
对待测雷达有效输入端供电,将电源电压从6V逐步增大至32V,记录下待测雷达正常工作状态的最小电压和最大电压。
附录A
(规范性附录)
开阔场地
A.1 测试场地
A.1.1 理想开阔场
除地平面、待测雷达及目标外无其他任何反射物体的平坦、空旷场地。
A.1.2 场地范围
测试场地空间范围大于待测雷达产品规范中的探测范围。
A.2 测试目标
测试目标为球反射器,球反射器由三个相互垂直的厚度为2mm的圆形钢板组成,如图A.1。电磁波通过在反射器金属角上折射放大,产生平行于发射信号的回波信号,以模拟目标。
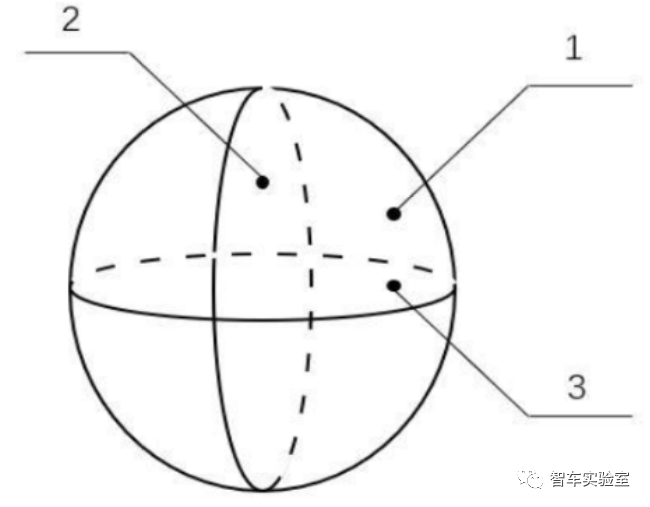
说明:
1 ——竖直反射钢板A;
2 ——竖直反射钢板B;
3 ——水平反射钢板。
图A.1 球反射器
附录B
(规范性附录)
毫米波暗室
B.1 消声暗室
毫米波暗室是一种屏蔽暗室,其内墙、地板和天花板覆盖有无线电吸收材料,通常是锥形聚氨酯泡沫体。腔体的一端有接收天线支架,另一端有转台。毫米波暗室的电磁环境等效于理想开阔场,雷达在此环境内,除测试目标外不应探测到其他物体。
B.2 暗室功能
B.2.1 模拟目标
若毫米波暗室空间距离不能满足测试项的空间要求,则通过雷达目标模拟器模拟目标,目标模拟器通过多普勒效应可以实现对物体运动距离和运动速度的模拟。暗室的一端为接收天线,接收天线通过下变频器连接到目标模拟器,另一端为待测雷达,雷达下的转台用于控制雷达的水平方向角和垂直俯仰角,从而模拟目标角度。转台水平范围角度、垂直范围角度都至少应满足180°。待测雷达的相位中心应置在转台的转动轴线上,待测雷达的相位中心与接收天线的相位中心位于同一水平面和同一竖直面。典型测试系统框图如图B.1所示。
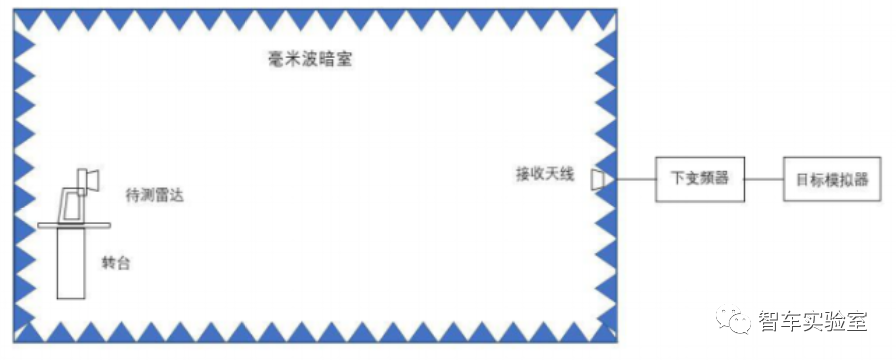
图B.1 目标模拟暗室
B.2.2 发射测试
暗室按B.2.1给出的要求搭建,将目标模拟器替换为功率计,如图B.2所示。
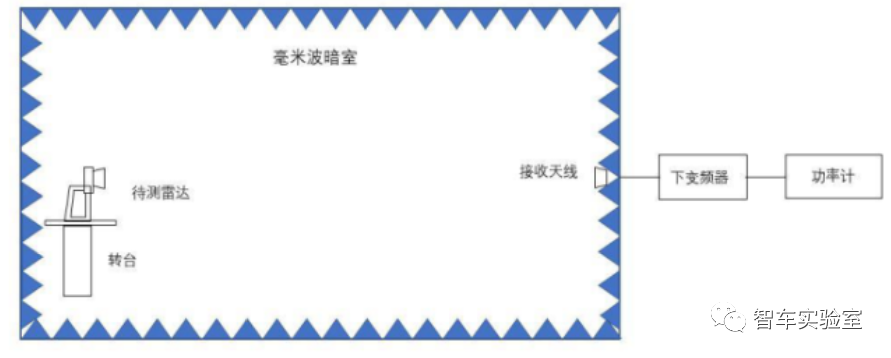
图B.2 发射测试暗室
附录C
(规范性附录)
发射机测试校准
C.1 测试天线
C.1.1 接收天线
在发射机测试中,接收天线用于接收待测雷达的发射信号,连接到功率计。
接收天线应该安装在一个允许天线水平或垂直极化的装置上,在消声暗室中应该允许其中心离地面的高度在指定的范围内(通常是1m到4m)可变。接收天线使用波导标准增益喇叭。喇叭天线的增益一般用各向同性辐射体来表示。
C.1.2 替代天线
替代天线用于在校准测试装置时,代替待测雷达用于确定整个测试装置的功率损耗。替代天线使用波导标准增益喇叭,并且已知其增益。
C.2 校准装置
校准装置用于确定从待测雷达到功率计之间的功率损耗,从而在发射机测试时对功率计测得的功率值进行补偿,最终得到待测雷达的发射功率。测试装置如图C.1所示。接收天线和功率计之间接入下变频器,将收到的高频信号转换为功率计工作范围内的频率。
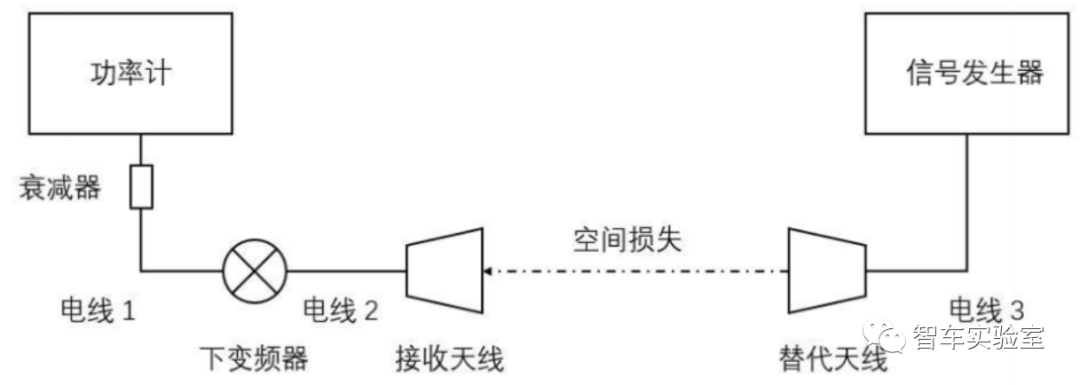
图C.校准装置
C.3 校准方法
发射机测试的校准按以下步骤执行:
a) 使用常规校准程序校准所有仪器。
b) 将待测雷达从测试夹具上移除,并用替代天线替换待测雷达。将测试夹具中的替代天线朝向接收天线。替代天线的参考平面应与待测雷达参考平面一致。替代天线与接收天线之间的距离即为暗室的距离。
c) 将信号发生器连接到替代天线。
d) 将一个10db衰减器连接到功率计上,以改善驻波比。如果测试装置的信噪比低,则可以省略衰减器。
e) 将信号发生器的频率和功率调整到与待测雷达输出相同的值。将此信号应用于校准。
f) 记录功率计输入信号的绝对读数。
g) 从待测雷达参考平面到功率计的总衰减见公式(C.1):

式中:
Ca ——功率校准参数,即待测雷达参考平面到功率计的总衰减;
Pset ——信号源设置的输出功率;
Gtx ——替代天线的增益;
Pread ——功率计读取的输入功率。
参考文献
[1] GBT 17626.22-2017电磁兼容试验和测量技术全电波暗室中的辐射发射和抗干扰度测量
[2] GB/T28046.1-2011道路车辆电气及电子设备的环境条件和试验第一部分:一般规定
[3] GB/T28046.2-2019道路车辆电气及电子设备的环境条件和试验第二部分:电气负荷
[4] GB/T28046.4-2011车辆电气及电子设备的环境条件和试验第四部分:气候负荷
[5] GJB 1289-1991战场侦察雷达战术性能试验方法
[6] GJB2241A-2008脉冲激光测距仪性能试验方法
[7] GJB 2678-1996雷达发射分系统性能测试方法功率效率负载特性
[8] GJB 3310-1998雷达天线分系统性能测试方法方向图
[9] ETSI EN 303096-1V 1.1.1Short Range Devices;Measurement Techniques for Automotive and Surveillance Radar Equipment
END
下载白皮书 《如何确保C-V2X性能并满足2021年度的一致性要求》



 广告
广告 编辑推荐




最新资讯
-
Spectrum仪器推出DDS选件,大幅提升任意波
2026-03-11 09:58
-
2026深圳工业展 | 3月31日-4月3日,思看科
2026-03-11 09:36
-
TCT亚洲展|3月17日-19日,思看科技与您不
2026-03-11 09:35
-
展会预告 | TCT亚洲展倒计时!思看科技五大
2026-03-10 20:50
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
