




 广告
广告





















































讲清车载毫米波雷达基本概念
2022-02-27 11:18:26· 来源:汽车ECU开发 作者:赵孔瑞

首先给大家介绍车载毫米波雷达基本概念。重点从通俗易懂的角度向大家介绍毫米波雷达基本原理、最大探测距离和距离分辨率、最大测速范围和速度分辨率、最大测角范
首先给大家介绍车载毫米波雷达基本概念。重点从通俗易懂的角度向大家介绍毫米波雷达基本原理、最大探测距离和距离分辨率、最大测速范围和速度分辨率、最大测角范围和角度分辨率。
1 毫米波雷达原理
毫米波雷达利用发射信号和接收信号之间的频率差来进行测距、测速,利用天线阵元之间的相 位差来进行测角。毫米波雷达系统框图如下图所示:
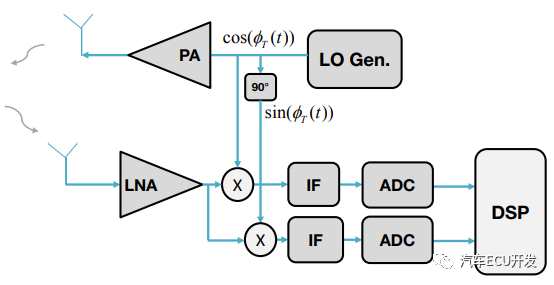
图1 毫米波雷达系统框图
(1)毫米波雷达首先通过信号发生器(图中LO Gen.)产生我们所需要的雷达信号波形,如现在常用的快速锯齿波或者叫线性调频连续波(FMCW),这时被产生的信号还是基带信号,不能够直接发射出去,还需要多级变频调制处理,将产生的雷达波形信号调制到76GHz~77GHz之间,经过放大器(PA)放大之后,再经发射天线(TX)辐射到空间中去。目前77GHz常用的FMCW波形示意图如下图所示:

图2 FMCW雷达波形示意图
实际雷达工作波形并没有图2这么理想,真正的雷达工作波形将在后面贴上。毫米波雷达在一个工作周期内或者一帧内(简称一个frame)发射一连串的FMCW信号,一个FMCW就是一个Chirp。如图2所示,一个frame由N个Chirp组成。
(2)由发射天线辐射的雷达信号照射到空间目标之后,再反射到雷达处,被接收天线(RX)接收,经过低噪声放大(LNA)之后,与参考信号(即雷达发射信号)进行混频,得到复基带信号(I路信号和Q路信号)。经低通滤波之后,通过ADC采样得到离散的复基带信号。车载雷达RF模块与军用雷达由3大不同,首先,车载雷达RF模块现在高度集成化的,集成在一个RF芯片上,而军用雷达的RF是由多个分离式的单元组成;其次,车载雷达为了降低成本,采用的是模拟混频和模拟低通滤波,直接得到基带信号,而军用雷达是采用数字混频和数字带通滤波,得到的是带有一定载频的中频信号,然后采用高速ADC进行采样得到数字中频信号;第三,在混频部分,目前除TI采用I/Q正交混频外,英飞凌和NXP为了降成本,采用的是I单路混频,如图3所示。军用雷达目前普遍采用I/Q正交混频。所以英飞凌和NXP这两家的基带信号强度要比TI的低3dB,但是省掉Q路的混频硬件模块和对应的ADC。
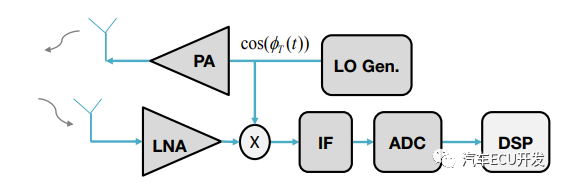
图3 只有I路混频的雷达系统结构图
发射信号和接收信号的混频如下图所示:
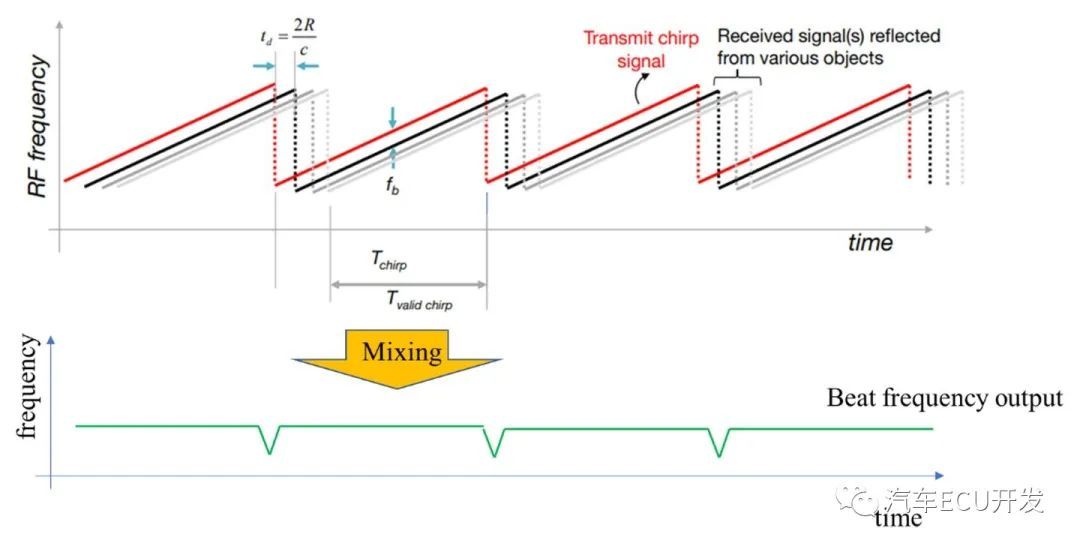
图4 单目标情况下的混频结果示意图
从图4可见,对单个目标而言,混频后得到的基带信号是一个频率固定的近似正弦信号。当存在多个目标情况下,基带信号将是多个不同频率的正弦信号的叠加。
(3) ADC采样后的数字信号在DSP中完成相应的信号处理。雷达信号处理流程如图5所示:
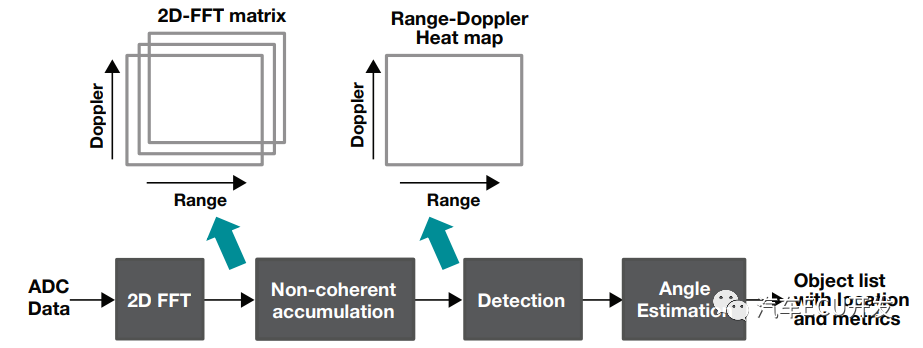
图5 雷达信号处理链路流程图
信号处理的具体步骤包括:
1)2D-FFT:首先对每个RX通道的每个frame内的数据进行2D-FFT处理(R-D处理),得到每个通道的距离-多普勒谱。这个2D-FFT谱是一个复数结果,不能直接进行目标位置和速度信息的提取。因此,我们要进行非相干积累处理。
2)非相干积累:即对每个通道对应的2D-FFT结果取模平方值,然后所有通道的2D-FFT取模平方结果的对应位置求和后平均,得到一张合成后的R-D谱。这就完成了非相干积累处理。合成的R-D谱上的每一个峰值代表一个可能的目标或干扰。非相干积累的目标有2个:首先,是提高信噪比,提高检测精度;其次,平滑噪声,降低CFAR阶段的误检率。
3)CFAR检测:根据非相干积累结果进行恒虚警检测,得到这一帧内所有可能的目标。所有被检测出来的目标并不一定都是真实目标,有可能是很强的杂波干扰。被检测出来的干扰目标可以在目标跟踪阶段进行滤除。根据CFAR检测的可能目标在R-D谱上的对应位置,可以计算出目标的距离和速度信息。
4)角度估计:CFAR完成后虽然得到了每个可能目标的位置和速度信息,但是还没有得到目标的角度信息。为得到每个目标的角度信息,需要利用每个目标在所有接收通道上的对应R-D谱位置上的数据,通过DBF或者空间谱估计方法尽心角度估计,进而得到目标角度信息。
上述步骤完成了对每个目标的距离、速度和角度信息的计算,利用这些信息可以进行聚类和跟踪等处理,进一步得到目标的轨迹信息以及尺寸和类型信息。
接下来为大家介绍一些雷达威力范围和性能指标的计算和评估方法。
2 雷达威力范围和性能指标
1)雷达最大探测距离
雷达工作参数决定了雷达最大探测距离,有两种方法可以分析和计算雷达最大探测距离:基于雷达方程的方法和基于雷达调频斜率的方法。首先我们介绍基于雷达方程的最大探测距离估计方法。
假定雷达通过天线往球面空间均匀辐射能量,发射天线功率为 Pt,发射天线增益为 Gt ,那么距离处雷达辐射的功率密度为:
pt=(PtGt)/(4πR²)
在距离 R 处,雷达辐射的部分能量被目标截获,假定目标散射截面积(RCS)为σ,那么被目标截获的功率为
Pσ=σ*pt=(PtGtσ)/(4πR²)
这部分能量又辐射到空间任意方向上去,重新辐射到雷达天线处的功率密度为:
Pr=Pσ/(4πR²)=((PtGtσ)/(4πR²))*(1/4πR²)
此时,有部分能量被雷达接收天线接收,假定雷达接收天线的接受面积为 Ae,那么雷达天线接收的信号功率为:
Pr=Ae*pr=((PtGtσ)/(4πR²))*(Ae/4πR²)
假定雷达接收机灵敏度(最小可检测信号)为 Smin,那么当 Pr=Smin 时,对应的雷达探测距离R就是雷达的最大可探测距离:
Smin=Pr=((PtGtσ)/(4πR²))*(Ae/4πR²)
即
从上面推导可见,最大探测距离不仅与发射功率和发射天线增益有关,还与目标 RCS和接收机灵敏度有关。目标RCS是个很玄的东西,到现在业内都没人说清RCS是怎么回事,它的机理是什么。因为RCS因素的影响,显著增大了雷达最大探测距离评估的复杂度。因此,不确定因素太多,基于雷达方程来进行最大探测距离评估和计算不是最好的方法。
另一种最大探测距离计算方法比较简单,只与调频斜率和雷达RF的中频带宽。由于RF芯片由中频带宽限制,所以雷达发射和接收信号在混频后,RF芯片接收通道最大可接收的差频信号频率不超过中频带宽的最大值,所以车载雷达最大可探测距离可以表示为:
其中
为 IFmax RF芯片的最大中频带宽;
S为FMCW调制斜率;
c是光速。
因此,在车载雷达系统方案设计时,最大可探测距离可以用第二种方法来计算。
2)雷达距离分辨率
距离分辨率的概念是:在角度和速度相同的条件下,能够将两个目标区分开来的最小距离间隔。FMCW雷达信号处理中,通常用2D-FFT来进行距离-多普勒处理。所以我们从离散傅里叶变换角度推导距离分辨率如何计算。假定距离维处理时,每个Chirp的有效采样长度为Ta。那么进行傅里叶变换后,对应的频率分辨率为1/Ta 。因此,在距离维上可以区分两个目标的条件是,它们的频率间隔 △f 必须大于1/Ta ,即
又因为频率间隔△f与对应的距离间隔△d之间的关系为
由此可得
其中 B=S x Ta为有效带宽。
所以距离分辨率为

再次强调的是,B是有效带宽,即距离维上你实际采样点数所占时间长度所对应的调制带宽。不是你雷达工作时的整个雷达波形扫频带宽,因为在实际采样过程中,往往对每个Chirp周期内的数据掐头去尾,丢掉质量不好的起始端和末尾段数据,有效带宽往往小于雷达工作时的扫频带宽,如下图所示。

图6 雷达扫频带宽与实际有效带宽的关系
3)最大不模糊速度
不模糊测速范围表示雷达的最大测速能力。假定雷达发射两个Chirp的FMCW信号,Tc为Chirp周期,如下图所示。
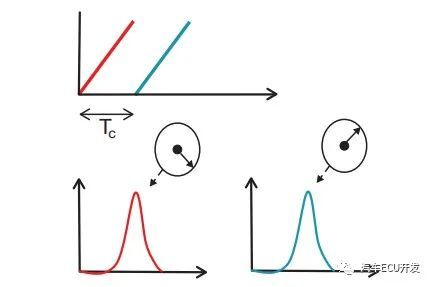
图7 两个Chirp的FMCW信号
假定空间中只有一个目标,目标运动速度为,那么红色Chirp和蓝色Chirp之间因为速度引起的距离徙动为 2vTc ,之所以不是vTc,是因为雷达信号往返有双程差。因此,两个Chirp因为速度引起的相位差为
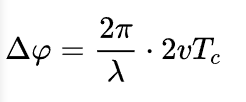
由此可得
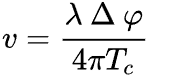
通常△φ的绝对值小于π,因此,最大不模糊速度为
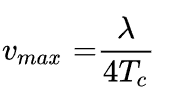
所以当Chirp周期为Tc时,雷达测速范围为 -vmax < v < vmax 。
4)速度分辨率
与距离分辨率相类似,速度分辨率表征区分两个不同速度目标的能力。因为求解目标目标速度时,是在慢时间维上进行FFT处理,FFT点数为一个frame内的Chirp数目。假定一个frame内的Chirp数为N,则速度分辨率为
5)最大测角范围与角度分辨率
毫米波雷达的最大测角范围与雷达阵列的阵元间距有关。接收阵元接收空间反射回来的信号,相当于在空间维上进行空间采样。雷达天线阵列如下图所示:
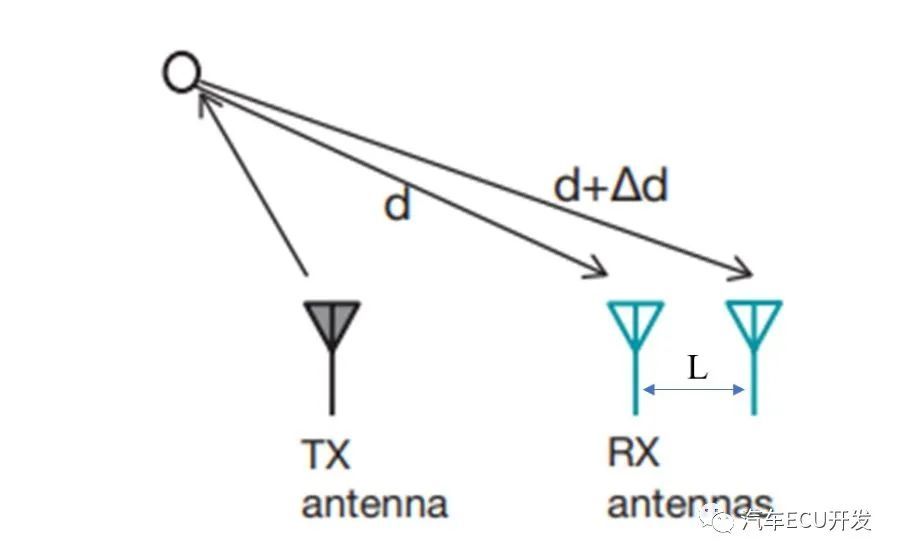
图8 雷达天线阵列示意图
假定雷达接收天线阵元间距为L,在角度处有一个目标。那么对于该目标θ,相邻两个接收阵元之间的相位差为
其中△d=L*sin(θ) ,那么
由此推导得到

因此,当阵元间距等于半波长,即 L=λ/2时,对应的最大不模糊测角范围为 -π/2~+π/2 。
类似的,假定雷达接收阵元数目为

,那么角度分辨率为

其中,D为接收阵列天线孔径。



 广告
广告 



最新资讯
-
“智能汽车基础地图生产技术规程”将有国家
2026-03-11 12:26
-
“道路车辆 降低儿童约束系统的误用风险 第
2026-03-11 12:25
-
整车能耗试验:从等速油耗到循环工况评价
2026-03-11 12:24
-
重塑噪音感知:GRAS 为追求静谧者改写规则
2026-03-11 11:40
-
Spectrum仪器推出DDS选件,大幅提升任意波
2026-03-11 09:58
