




 广告
广告





















































基于虚拟载荷的悬架台架耐久试验方法
2022-01-19 23:46:35· 来源:汽车NVH之家

摘要:为加速试验认证周期、降低试验成本,采用了基于多体动力学的虚拟载荷生成方法及其数据处理流程,搭建了悬架系统道路模拟试验台架,分别进行了基于虚拟载荷
摘要:为加速试验认证周期、降低试验成本,采用了基于多体动力学的虚拟载荷生成方法及其数据处理流程,搭建了悬架系统道路模拟试验台架,分别进行了基于虚拟载荷和基于试车场真实载荷的耐久试验。通过耐久试验零件失效模式与失效发生时间的对比分析,验证了基于虚拟载荷的悬架道路模拟试验方法的有效性。
前言
结构耐久性能是车辆最重要的性能之一,也是整车开发中最关键的环节之一。为了快速考核悬架的结构耐久性能,开发出了台架道路模拟试验方法,其试验设备以MTS329多轴道路模拟试验机为代表。过去几十年行业内普遍将试车场道路数据采集的载荷作为台架试验的载荷源,然而这种方法由于引入了试车场道路数据采集,所以台架道路模拟试验不得不推迟到工程样车制造完成之后进行。若台架道路模拟试验的载荷来源能够脱离试车场道路数据采集,则台架道路模拟试验可至少提前半年进行,能有效缩短系统级和整车级台架结构耐久试验的周期。
随着计算机技术和虚拟仿真技术的发展,多体动力学软件已能准确模拟车辆在试车场所受的载荷,因此,可将该载荷作为台架道路模拟试验的载荷源[1]。美国通用汽车公司在多年前就开始扫描试车场3D路面[2],并将数字路面导入多体动力学软件中,生成用于台架道路模拟试验的虚拟载荷信号,在骡子车阶段完全取代了试车场道路数据采集[3]。欧洲车企也能利用虚拟载荷进行前期零部件级试验,但对悬架或整车级多轴道路模拟试验运用较少。MTS公司结合自身的技术优势,开发出了一套HSRC(hybrid system response convergence)混合试验方法,采用虚拟轮胎模型和路面模型与实际台架和车辆相结合的模式,也无需试车场道路数据采集[4]。国内绝大多数整车厂目前仍然采用试车场道路数据采集的载荷作为台架道路模拟试验的载荷源。一些学者专家尝试通过建立虚拟试验台预测零部件的疲劳寿命[5-6],但这些方法仍然无法摆脱试车场道路数据采集,如果虚拟试验台的载荷能来自于虚拟仿真分析,则效率会显著提高。鉴于此,国内各整车厂陆续开始扫描试车场路面,生成虚拟路面模型用于仿真分析。荣兵等[7]采用插值方法编程实现了三维虚拟路面重构,并研究发现曲线规则格栅(CRG)格式的路面具有更高的计算效率。孙成智等[8]通过试车场扫描,建立了3D数字路面模型,导入整车模型后能有效进行载荷预测。
本文中详细论述了基于虚拟载荷的前悬架和后悬架台架道路模拟试验方法,介绍了虚拟载荷生成方法及其数据处理流程,并在国内首次将虚拟载荷成功运用于物理台架道路模拟试验,通过对比物理试验的失效结果验证了此试验方法的有效性。
1 基于虚拟载荷的试验方法概述
传统基于试车场道路载荷的台架道路模拟试验方法如图1所示,在试车场道路数据采集之前,须对物理工程样车的关键零部件贴应变片,必要时还须在车身和轴头安装加速度传感器、在轮心安装六分力测量轮等。工程样车在试车场采谱时,受天气、路面、驾驶员和车辆自身状态等条件的限制,往往需要耗费很长时间。采谱过程全部结束之后,才能进行数据处理和台架道路模拟试验。
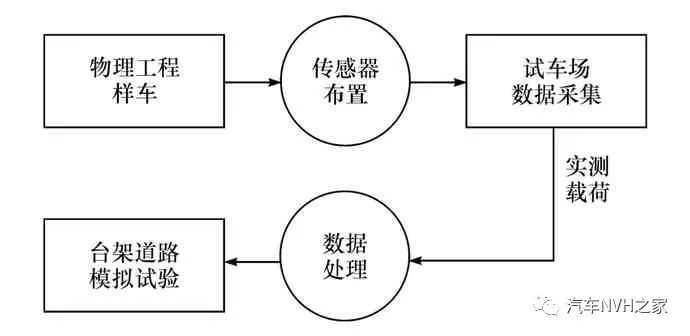
图1 基于试车场道路载荷的试验方法
基于虚拟载荷的台架道路模拟试验完全省去了试车场道路数据采集这一环节,试验载荷来自于虚拟仿真分析。图2示出此试验方法的基本流程。模型对标包括静态对标和动态对标,其中静态对标是在相同激励下将K&C试验台的响应信号与初始车辆模型响应信号进行对标,而动态对标则是基于多轴道路模拟试验台。若初始车辆模型的响应信号和台架的响应信号差别较大,则须进一步修正模型,若初始车辆模型的响应信号与台架响应信号一致,则该模型可用来生成虚拟载荷。结合驾驶员模型、该车型对应的轮胎模型和试车场3D数字路面模型,利用多体动力学软件可输出虚拟载荷时间历程。经过数据处理将虚拟载荷转化成迭代目标信号,可进行零部件级试验、系统级试验和整车级试验。由于篇幅限制,本文中仅讨论悬架子系统的试验方法。
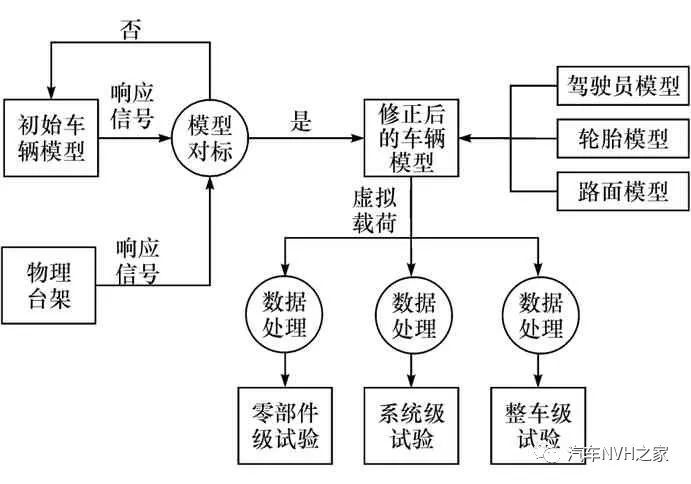
图2 基于虚拟载荷的试验方法
2 虚拟载荷生成
虚拟载荷由多体动力学软件Motion View生成,虚拟模型包括驾驶员模型、车辆模型、轮胎模型和路面模型,构成“人-车-路”闭环系统。
驾驶员模型控制转向盘转角,保证车辆模型按照预定轨迹和车速在路面上正确行驶,其控制方程为

式中:β为转向盘转角;S r为传动比;δ为前轮转角。
根据2自由度车辆模型,可得前轮转角与轨道误差之间的关系[9]为
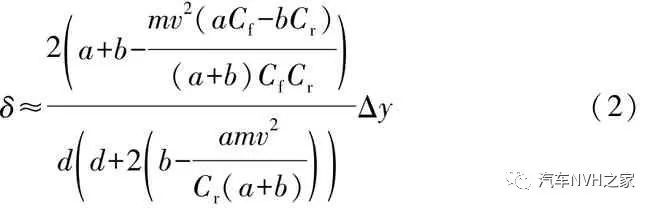
式中:a为整车质心至前轴的距离;b为整车质心至后轴的距离;m为整车质量;v为车辆行驶速度;C f为前轴侧偏刚度;C r为后轴侧偏刚度;d为前视距离;Δy为即时状态横向位移误差,即轨道误差。
车辆模型基于硬点数模坐标、衬套刚度曲线、缓冲块刚度曲线、减振器阻尼特性曲线等参数建立,其中前缓冲块刚度曲线如图3所示,前减振器阻尼特性曲线如图4所示。
轮胎模型采用基于柔性环假设的3D非线性FTire模型,仿真频率高达200 Hz,且能处理极其粗糙的路面特征。通过多种类型的轮胎特性试验得到其力学特性数据,采用配套辨识工具进行轮胎模型参数辨识。表1详细列出了需要进行的轮胎特性试验种类。
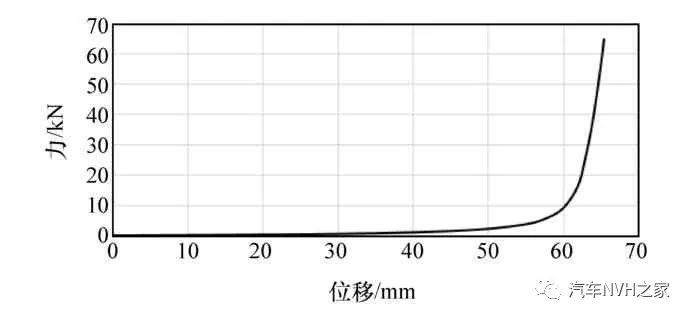
图3 前缓冲块刚度曲线
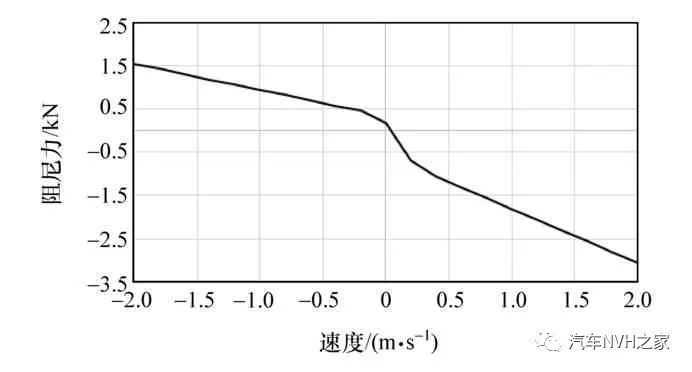
图4 前减振器阻尼特性曲线
表1 轮胎特性试验种类

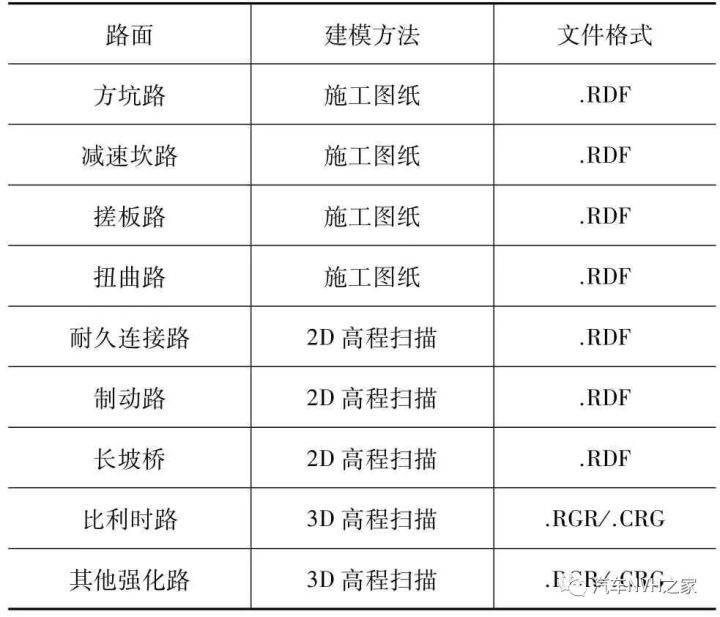
虚拟路面模型源自国内某试车场,建模方式主要有3种,包括根据施工图纸的路面几何尺寸进行建模,以及根据2D或3D路面高程扫描数据进行建模。根据施工图纸建模适用于横截面形状规则的路面,如方坑路等。对于横截面形状不规则的路面,无法根据施工图纸直接建模,因此需要对路面高程进行扫描,2D扫描通过激光位移传感器对路面进行测量,最终获取路面高程信息,生成2D路面模型。3D扫描采用2个高分辨率激光扫描探头结合高精度惯性补偿系统,对路面进行360°环绕扫描,获取指定分辨率的点云数据,后处理生成3D路面模型。常用的路面模型文件有等效容积(RDF)格式、规则栅格(RGR)格式和曲线规则栅格(CRG)格式。鉴于计算效率,RDF格式仅适用于横截面规则的路面,而对于横截面不规则的路面,需要采用RGR格式或者CRG格式。RGR格式路面通过一系列离散矩形节点的高度来模拟路面高程,这些节点在水平面均为等间距分布。由于栅格的规则性,路面文件中每个节点的水平面坐标值都无需存储,只须储存水平面坐标增量、栅格原点坐标、栅格旋转角度和节点高度值。如果实际道路为曲线路径,RGR文件数据可被带有路径轨迹的3D样条路面文件引用,这样规则栅格就可沿着路径轨迹铺设。CRG格式路面类似于带路径中心线的RGR格式路面,不同点在于节点在路面横向的间距值可任意指定,从而能更灵活地定义各种路面。表2汇总了此次针对国内某试车场的各种路面建模方法。
表2 虚拟路面建模方法
将驾驶员模型、轮胎特性文件、虚拟路面模型与车辆模型集成,构成完整的虚拟模型,进行仿真分析,生成虚拟载荷。图5展示了Motion View中的虚拟模型。
3 数据处理与载荷相关性分析
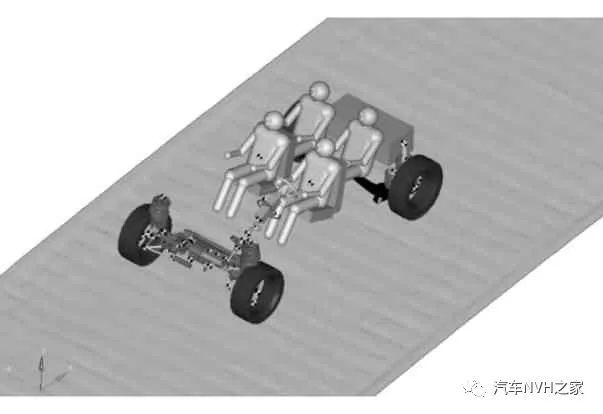
图5 Motion View虚拟模型
对于由多体动力学软件生成的虚拟载荷,须先进行数据处理,才能得到迭代目标信号,用于台架试验迭代。表3和表4分别列出了前、后悬架系统的虚拟载荷通道。数据处理的流程如图6所示,首先修改虚拟载荷信号的头文件,使时域分辨率、频域分辨率、通道名称和通道顺序等满足试验要求。对于模型与台架单位定义不同的通道,须对其进行单位转换。由于试验台架绕Z轴的转角很小,无法全面模拟车辆在试车场的转弯运动,试验时将车辆转向机锁死在中间位置,只模拟绕Z轴的力矩,并不模拟绕Z轴的运动,因此须对虚拟载荷信号进行转向修正,修正公式为

式中:Fx,Fy分别为修正前的轮心纵向力和侧向力;Fx E,Fy E分别为修正后的轮心纵向力和侧向力。
表3 前悬架系统虚拟载荷通道
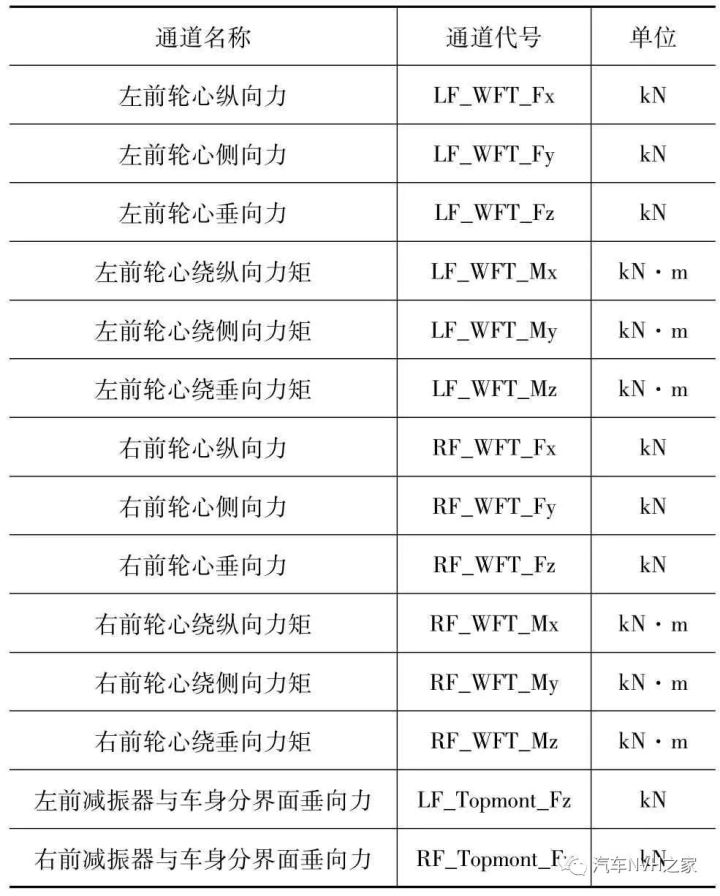
表4 后悬架系统虚拟载荷通道
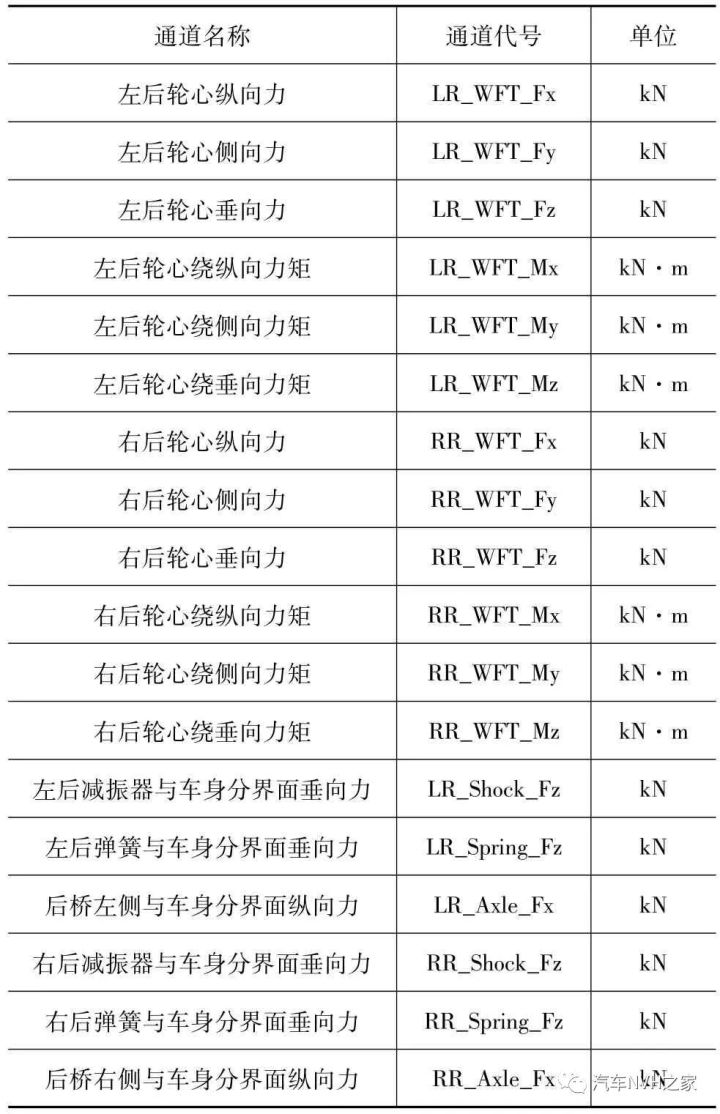
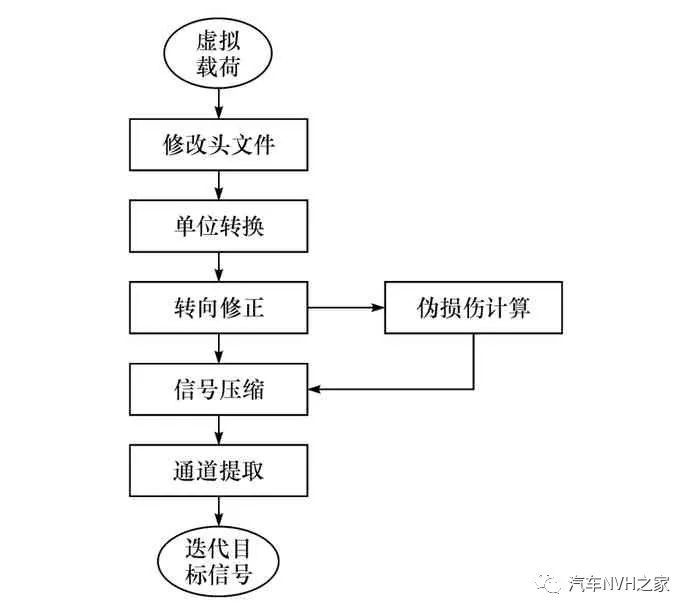
图6 数据处理流程
为满足台架试验快速验证的需求,往往须对信号进行压缩,删除对损伤贡献量小的信号,以加速试验周期。采用基于 Miner法则的伪损伤计算方法[10],以保留一定百分比的原始信号伪损伤为标准,对信号进行时域压缩,其中伪损伤保留的百分比由企业标准确定。
最后按要求提取通道,通道顺序需与试验站台设置文件中的通道顺序一致。
为验证基于多体动力学软件生成的虚拟载荷的准确性,对虚拟载荷与实际道路载荷进行相关性分析。由于载荷通道数较多,此处仅以比利时路面左前轮心纵向力为例进行说明。表3列出了两种载荷源下左前轮心纵向力统计学特性的对比,图7~图9分别展示了雨流计数、穿级计数和功率谱密度的对比。可见,虚拟载荷与实际道路载荷相关性很好。
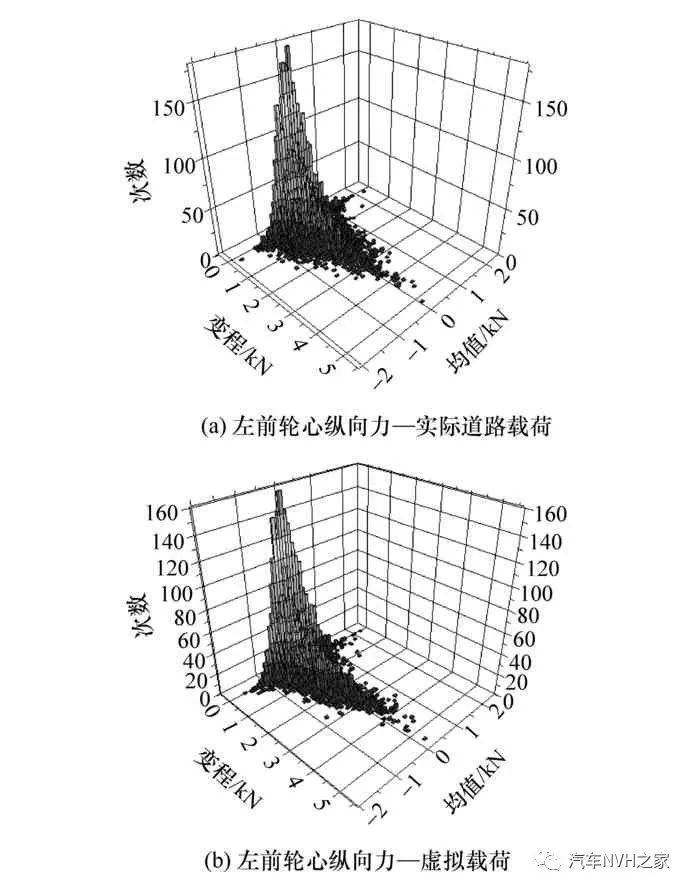
图7 雨流计数对比

图8 穿级计数对比
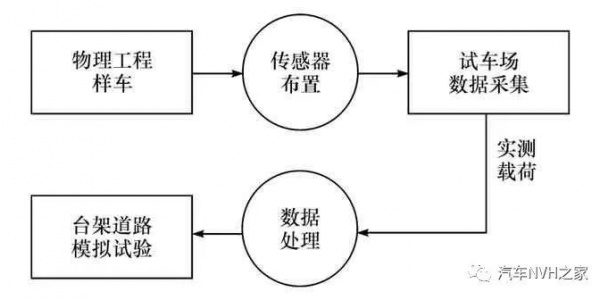
图9 功率谱密度对比
4 实车试验验证
实车试验验证的总体思路为:首先根据上述多体动力学软件生成的虚拟载荷信号,进行一轮前、后悬架系统耐久试验;其次对相同状态的零件,通过传统试车场数据采集,得到试车场的真实道路载荷,再进行一轮前、后悬架系统耐久试验;最后对比分析两轮耐久试验的零件失效位置和发生失效的时间,若一致,则说明基于虚拟载荷的悬架道路模拟试验方法是有效的。
4.1 夹具设计
试验车辆的前悬架为麦弗逊结构,后悬架为扭力梁结构。对于虚拟模型里输出的悬架与车身分界面间的作用力,在实车试验中可用力传感器进行测量。在传统的悬架试验夹具基础上进行改进,在悬架与夹具的分界面上加装力传感器,其所测得的力信号能准确表征悬架与车身分界面的力。图10和图11分别示出前悬架和后悬架试验中力传感器的安装位置,其中前悬架有2个力传感器安装点,后悬架有6个力传感器安装点。
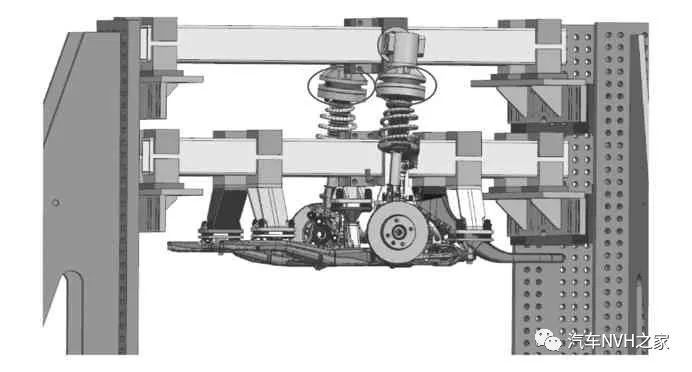
图10 前悬架试验中力传感器安装位置
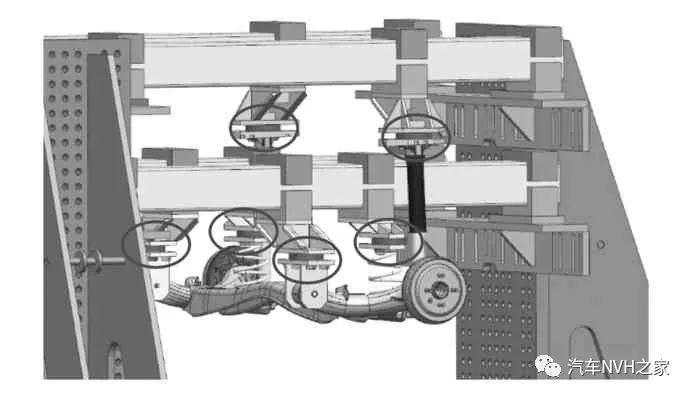
图11 后悬架试验中力传感器安装位置
4.2 模型辨识
对系统施加特定白噪声激励信号,得到此激励下的响应信号,采用频率响应函数法进行模型辨识,求解公式为
式中:H(f)为系统模型;Gyx(f)为响应信号和激励信号的互功率谱;Gxx(f)为激励信号的自功率谱。
4.3 迭代
迭代的目的是得到试验台架的驱动信号,使被试件在此驱动下的响应信号与迭代目标信号一致,其基本流程如图12所示。对于悬架系统试验,迭代质量评价指标主要包括各通道均方根值误差、最终响应信号与迭代目标信号的伪损伤值对比、幅值对比和功率谱密度对比等。
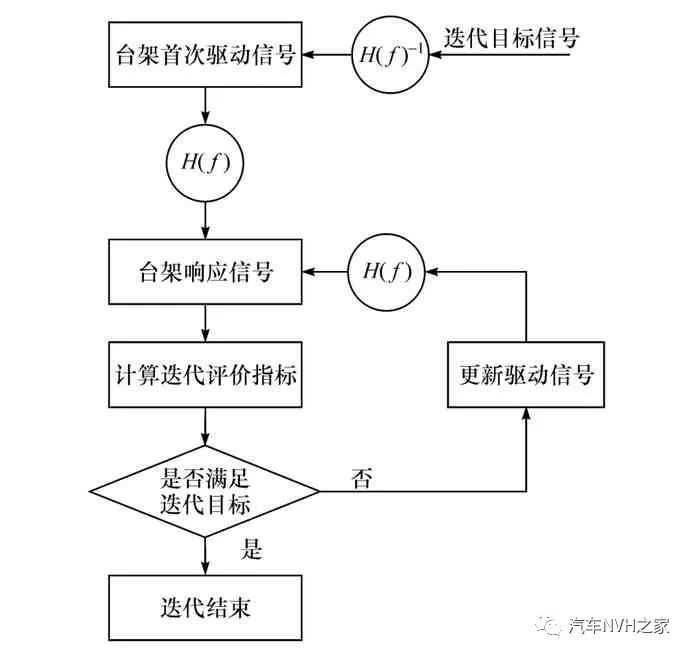
图12 迭代流程图
传统的悬架道路模拟试验迭代通道通常包括由测量轮测出的轮心六分力信号和由关键零部件应变片测出的应变信号,但由于在虚拟模型中计算应变耗时长、效率低,传统的迭代方法和迭代通道选择需要改变。悬架与夹具连接面上的力传感器信号能直接反映零件的真实受力状态,因此选用此力信号作为首要迭代控制目标,测量轮的六分力信号作为次要迭代控制通道。
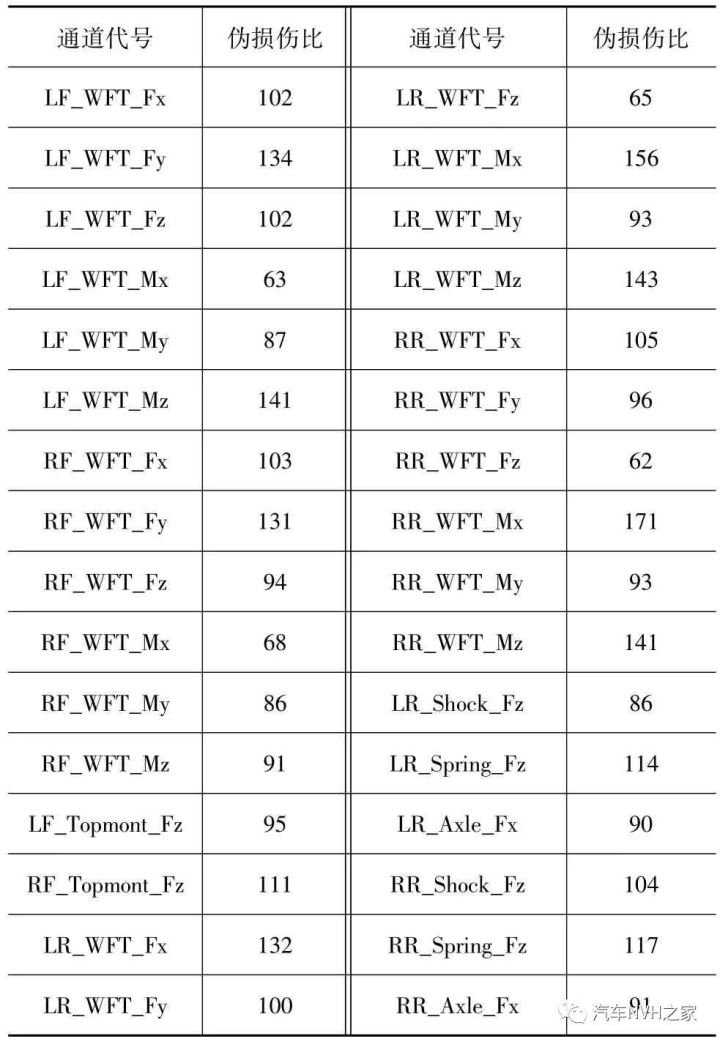
应用MTS公司的 RPC软件[11]对台架进行迭代,迭代路面包括比利时路、方坑路、扭曲路等。由于篇幅有限,文中仅展示损伤占比最大的比利时路面的迭代效果。表5列出了比利时路面各通道最终响应信号与迭代目标信号的伪损伤值之比。由表可见,各通道伪损伤比值均在60%~180%之间,满足企业规范要求。图13截取了部分左前轮心纵向力时域信号,可见时域上最终响应信号与迭代目标信号一致。图14展示了左前轮心纵向力功率谱密度对比,可见频域上最终响应信号与迭代目标信号一致。其余31个通道的迭代结果与左前轮心纵向力类似。分析表明迭代效果很好,台架最终响应信号复现了迭代目标信号。
表5 迭代各通道伪损伤对比 %
4.4 耐久试验
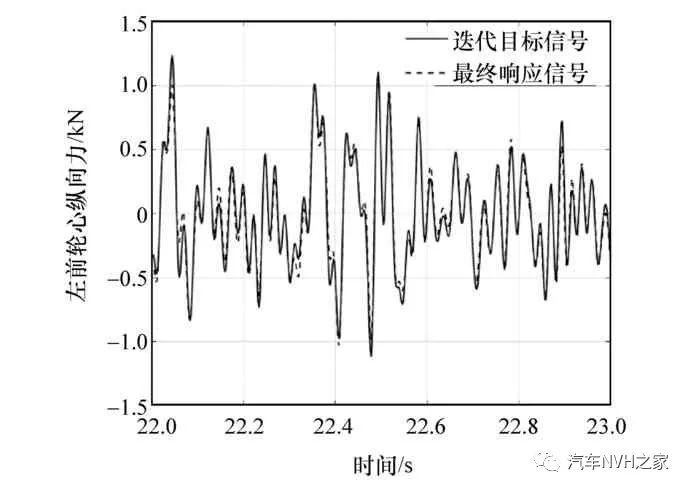
图13 左前轮心纵向力时域信号对比
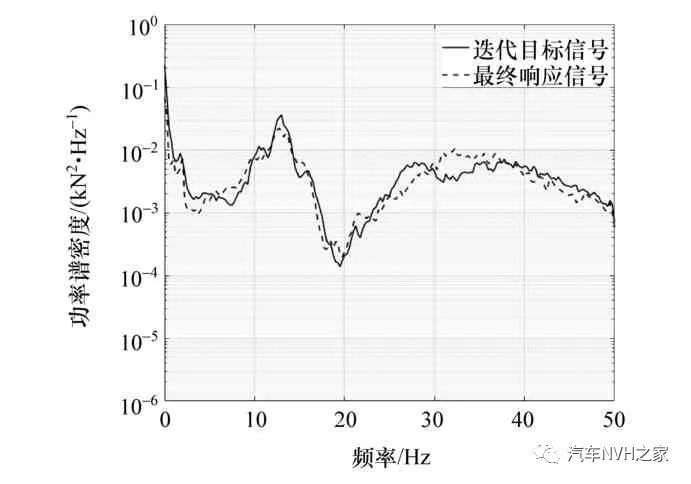
图14 左前轮心纵向力功率谱密度对比
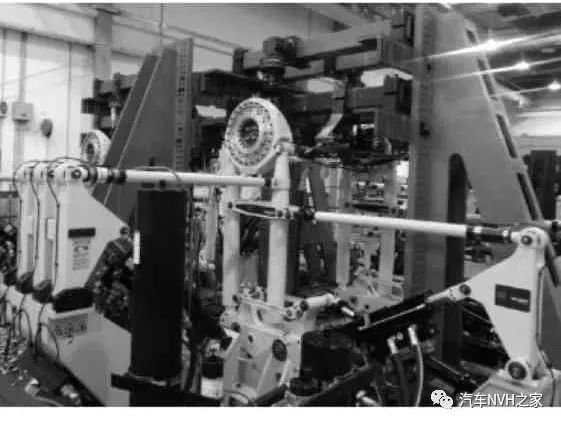
提取各路面迭代的最终驱动信号,按照企业标准中规定的各路面循环次数进行一轮基于虚拟载荷的耐久试验。同时,采用相同状态的悬架系统零件,基于传统的试车场道路载荷再进行一轮台架耐久试验。试验台架如图15所示。两轮试验均发现左右两侧前控制臂衬套、后桥左右两侧衬套和后桥本体焊缝等处开裂,其中控制臂衬套开裂如图16所示。表6列出了两轮耐久试验中3处开裂发生的时间。由表可见,基于虚拟载荷的悬架试验不仅能完全复现失效位置,且失效发生的时间也非常接近,相对误差<7%。
- 下一篇:汽车试验:轿车轮胎湿路面相对抓着性能试验方法
- 上一篇:汽车 冷却风扇 噪声揭秘



 广告
广告 编辑推荐




最新资讯
-
用于赛车运动车辆动力学测量的光学传感器
2026-03-18 21:31
-
联合国法规R86对农林拖拉机灯光安装的工程
2026-03-18 12:20
-
联合国法规R78对L类车辆制动系统的工程化约
2026-03-18 12:16
-
联合国法规R77对机动车驻车灯静态可见性的
2026-03-18 12:16
-
TCT亚洲展启幕!思看科技人气爆棚,这些产
2026-03-17 19:17
