




 广告
广告





















































汽车试验:电动汽车用电动动力系噪声测量方法
2022-01-05 20:52:56· 来源:汽车测试网

电动汽车最大的特征就是用电动动力系代替或部分代替了传统动力总成, 这也给车辆NVH性能带来很大变化, 给车辆噪声控制带来新的问题。电动动力系虽然在噪声量级
电动汽车最大的特征就是用电动动力系代替或部分代替了传统动力总成, 这也给车辆NVH性能带来很大变化, 给车辆噪声控制带来新的问题。电动动力系虽然在噪声量级大小上小于传统动力总成,但是相比于传统动力总成声音成分主要分布在中低频,电动动力系的高频噪声有较大分布,所以听起来声音更尖锐刺耳,影响舒适性。因此电动动力系噪声控制是电动汽车开发的重要关注技术性能。
相比传统汽车及动力总成长时间发展形成的成熟标准体系,电动汽车是近些年才快速发展起来的,许多方面不成熟,甚至尚无标准。关于电动动力系噪声及测量,目前汽车领域无论是国内还是国外都没有相关标准,这使得电动动力系噪声控制和性能开发缺乏标尺。目前有的企业借鉴工业电机噪声测量标准,有的企业根据经验制定一个内部方法暂时使用,有的甚至都没有内部统一方法,这严重制约了电动动力系噪声水平的提高,限制了电动汽车发展。因此为满足行业发展需要,开展电动汽车用电动动力系噪声评价方法相关标准研究与制定工作非常重要与紧迫。
电动汽车用电动动力系噪声测量方法将通过对电动汽车用电动动力系技术发展应用和特性的调查,对国内相关或近似的噪声测试标准进行参考研究,结合我国电动动力系产业现状和试验技术能力,对开展电动动力系噪声评价的可行性进行分析,研究并提出适合电动汽车用电动动力系噪声评价的方法,制定电动汽车用电动动力系噪声测量方法标准。
电动汽车用电动动力系噪声测量方法
1 范围
本文规定了电动汽车用电动动力系的声功率级的和表面声压级的测量方法。
本文件适用于电动汽车用电动动力系及其子系统,其他类似结构和部件可参考使用。
2 规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 3241一2010 电声学 倍频程和分数倍频程滤波器
GB/T 3767-2016 声学 声压法测定噪声源声功率级和声能量级 反射面上方近似自由场的工程法
GB/T 3785.1一2010 电声学 声级计 第1部分:规范
GB/T 6882一2016 声学 声压法测定噪声源声功率级和声能量级 消声室和半消声室精密法
GB/T 15173-2010 电声学 声校准器
GB/T 18488.1 电动汽车用驱动电机系统 第1部分:技术要求
GB/T 19596一2017 电动汽车术语
3 术语和定义
GB/T 6882、GB/T 18488.1、GB/T 19596界定的以及下列术语和定义适用于本文件。
3.1 电动动力系electric powertrain system
包括了电驱动系统与传动系统的动力系。
[来源:GB/T 19596一20173.1.2.1.4.2]
3.2 驱动电机系统drive motor system
驱动电机、驱动电机控制器及其工作所必需的辅助装置的组合。
[来源:GB/T 19596-20173.1.2.1.10]
4 声学环境和测量仪器
4.1 一般要求
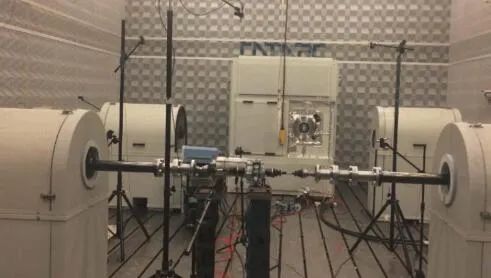
4.1.1 测量应在半消声室内或具有相邻两个反射面的半消声室内进行。在包络测量面内尽量减少试验台附属设备(驱动法兰、台架支撑、冷却管路等)、运转所必需的部件(控制器、线缆、悬置支架等)等所有附件的安装和布置,其较大反射表面部位应进行声学处理。
4.1.2 测试的频率范围为中心频率125Hz~16000Hz的倍频带(对于1/3倍频带,中心频率为100Hz~20000Hz)。如果测试环境的频率范围达不到以上的频率范围,测试频率范围可以缩小并在测试报告中做出说明。
4.2 背景噪声要求
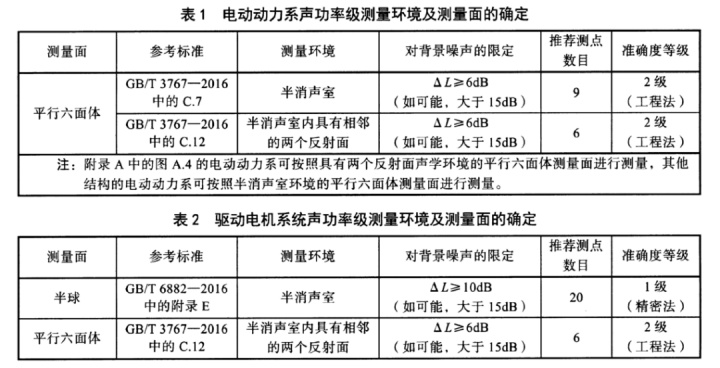
见表1和表2。
4.3 测试环境声学合用性要求
4.3.1 测试环境除反射面外应无其他反射体,使声源能够向反射面反方向的自由空间辐射。1级准确度等级测量环境的反射面应超出测量表面在该反射面上投影边界,超出量不低于最低测量频率声波波长的1/4和0.75m的较大者,反射面吸声系数在测试频率范围内应小于0.06。2级准确度等级测量环境的反射面应超出测量表面在该反射面上投影边界至少0.5m,反射面吸声系数在测试频率范围内应小于0.1。
4.3.2 测试环境对A计权,环境修正系数K2A≤4dB,对测试频率范围内第j个频带,环境修正系数Kz j≤4dB, 则测试环境有效。
4.4 测量仪器
4.4.1 包括传声器、电缆在内的声学仪器系统,应符合GB/T3785.1一2010中1级的规定。
4.4.2 滤波器应符合GB/T3241-2010中1级的规定。
4.4.3 每次系列测量的前后,应用满足GB/T15173-2010中1级要求的声校准器在测量频率范围内的一个或多个频率上对整个测量系统进行校验,每次系列测量前后校准所得的读数之差应不大于0.5dB。
5 测试对象与安装条件
5.1 测试对象
本文件适用的电动动力系典型结构参见附录A。
5.2 安装条件
5.2.1 电动动力系
5.2.1.1 推荐采用原车悬置系统和传动轴,安装姿态应符合设计要求。
5.2.1.2 传动轴与负载测功机的连接,应至少有1套具有隔振功能的弹性联轴器。
5.2.1.3 电机控制器的安装有如下说明:
a)对于电机控制器与电机集成在一起的驱动电机系统,将电机控制器视为电机的一部分,电机控制器与电机按实际匹配情况安装;
b)对于电机控制器与电机可分开的驱动电机系统,应将电机控制器远离电机,并对其进行声学处理,使其不影响电机本体噪声测试结果。如需包含电机控制器噪声,推荐采用原车布置方式。
注:电机控制器的安装位置和声学处理方式应在测试报告中进行说明。
5.2.2 驱动电机系统
5.2.2.1 驱动电机系统安装姿态应符合实际使用情况。
5.2.2.2 驱动电机系统应采用刚性安装支撑方式,连接测功机和电机的驱动法兰应具备高刚度低惯量性能,同时加入弹性隔振元件。
5.2.2.3 电机控制器的安装说明参照5.2.1.3。
5.2.3 电机控制器
5.2.3.1 如需单独测试电机控制器的噪声,宜将控制器放置在单独的半消声室内测量。
5.2.3.2 电机控制器应放置在半消声室内的反射面上,保证平稳静止。
6 声功率级的测定
6.1 一般要求
6.1.1 根据被测件的结构,在表1和表2中选择一个合适的测量方法进行声功率级的测定。
6.1.2 测量背景噪声时,被测件和传声器均放置于待测位置,被测件与测功机断开,驱动电机系统断电,测功机以测量工况转速运转。
6.2 运行工况
6.2.1 电动动力系
6.2.1.1 被测电动动力系的冷却和润滑应满足设计要求。试验过程中传动系统润滑油温宜在60℃~100℃范围内。
6.2.1.2 驱动电机系统的直流母线电压设定为额定电压,分别在电动和发电状态的峰值扭矩、峰值功率和持续扭矩、持续功率工况下运行。测试电源应满足被测件的设计要求。
6.2.1.3 试验过程中应保持边界条件一致。
6.2.1.4 测量6.2.1.2工况下各转速的声功率级,工况应记录在试验报告中。
6.2.1.5 如有需要,其他工况可由生产厂和用户共同协商确定。
6.2.1.6 如传动系具有多个挡位,则应在所有挡位下按照6.2.1.1~6.2.1.5的要求进行测量。
6.2.2 驱动电机系统和电机控制器
6.2.2.1 冷却应满足设计要求。
6.2.2.2 运行工况按照6.2.1.2~6.2.1.5的要求执行。
6.3 测量环境及测量面的确定
6.3.1 电动动力系
电动动力系声功率级的测量环境及测量面应符合表1的规定。
注:5.2.1.3中a)和b)的描述均适用于表1。
6.3.2 驱动电机系统
驱动电机系统声功率级的测量环境及测量面应符合表2的规定。
注:5.2.1.3中a)和b)的描述均适用于表2。
6.3.3 电机控制器
电机控制器声功率级应采用表3的方法进行测量。

6.4 声功率级的计算
6.4.1 测量面与传声器布置参考GB/T3767一2016标准时,声功率级的测量与计算方法参考GB/T3767一2016中的8.2.1、8.2.2、8.2.4和8.2.5,背景噪声与环境噪声修正按照本文件第8章执行。
6.4.2 测量面与传声器布置参考GB/T6882一2016标准时,声功率级的测量与计算方法参考GB/T6882一2016的9.4.1、9.4.3和9.4.4,背景噪声与环境噪声修正按照本文件第8章执行。
7 表面声压级的测定
7.1 一般要求
7.1.1 根据被测件的结构,在附录B中选择一个合适的测量方法进行声压级的测定。
7.1.2 测量背景噪声时,被测件和传声器均放置于待测位置,被测件与测功机断开,驱动电机系统断电,测功机以测量工况转速运转。
7.1.3 不同声学环境下的表面声压级测量结果不宜进行对比。
7.2 运行工况
7.2.1 稳态工况
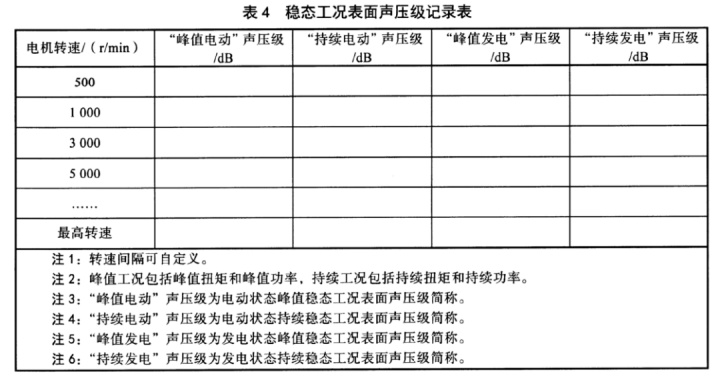
电机分别在电动和发电状态下的峰值和持续工况运行,并参照表4规定的转速进行测量,其中应包含最高转速。将每个工况测量的声压级结果记录在表4中。
7.2.2 非稳态工况
可参考被测件在整车状态下的加速、制动、滑行、倒车工况,其他工况由生产厂和用户共同协商确定。
7.3 表面声压级的计算
7.3.1 根据附录B确定驱动电机系统和电动动力系的传声器位置。
7.3.2 附录B中的h应不小于0.5m,如不满足要求,应在试验报告中予以说明。
7.3.3 计算所有传声器测量的平均声压级L',由式(1)计算得到:

7.3.4 稳态工况的测量结果参照第8章的要求进行修正,非稳态工况的测量结果不需要修正。
8 测量修正
8.1 背景噪声修正
按照第6章和第7章规定在声源不工作时测得背景噪声,背景噪声平均声压级为L”。在声源运行时测得的平均声压级为L',背景噪声修正值Ki(A计权或频带)由式(2)计算得到,单位为dB:

当△L≥15dB时无须修正。
当6dB≤△L<15dB时,应根据式(2)修正。当测量在单个频带上无效时,若△L≥6dB,则A计权值有效,这里△L'A=L'A-L"A。
当△L<6dB时,不符合本标准要求,测量结果准确度降低,但仍可按式(2)修正,结果作为被测声源的噪声上限,并在报告的正文和结果图标中说明。
8.2 环境噪声修正
环境修正K2(A计权或频带)按GB/T3767一2016附录A给出的方法之一测定。
如果K2≤4dB,则环境满足要求。
如果K2>4dB,则环境不能满足要求,测量结果准确度降低,但仍可按K2=4dB修正,结果作为被测声源的噪声上限,并在报告的正文和结果图标中说明。
在满足GB/T6882一2016附录A要求的半消声室中测量时,可不作环境修正。
8.3 修正计算
修正后的表面声压级L按式(3)计算:

9 记录内容
9.1 被测件信息
9.1.1 基本参数
包括但不限于型号、尺寸、所带附件、驱动电机额定功率/转速、额定扭矩/转速、峰值功率/转速、峰值扭矩/转速、最高转速、传动系速比、制造厂家、编号等。
9.1.2 安装条件
包括但不限于台架安装姿态、悬置系统、传动轴、控制器的布置、附件信息等。
9.1.3 监控参数
包括但不限于电压、电流(直流/交流)、转速、扭矩、功率、驱动电机冷却液的温度、润滑油的温度等。
9.2 声学环境
半消声室说明截止频率和背景噪声等,用简图说明被测件位置和半消声室布局。
9.3 仪器
9.3.1 说明测量用仪器的名称、品牌、型号、编号。
9.3.2 记录用于校准传声器的方法,校准日期和地点。
9.4 声学数据
9.4.1 1级准确度参考GB/T6882-2016中11.5对声功率级的要求。
9.4.2 2级准确度参考GB/T37672016中10.5的要求。
9.4.3 表面声压级的测量结果按照2级准确度要求处理。
附 录 A
(资料性)
电动动力系常见结构
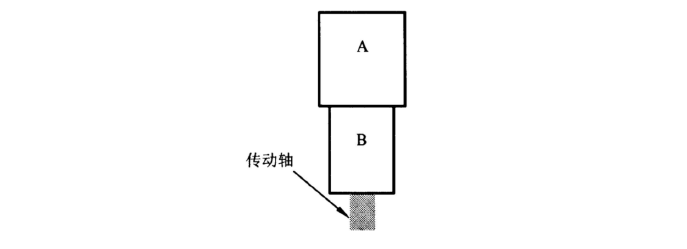
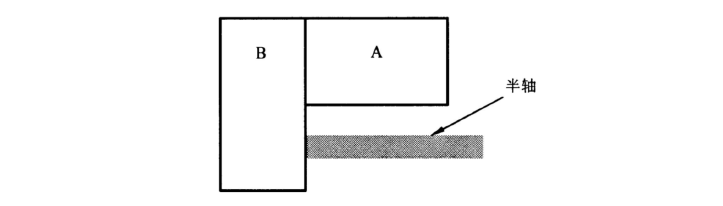
电动动力系在布置形式上可有多种结构。本文件适用于图A.1~图A.6所示的结构(其中A代表驱动电机系统,B代表传动系统),以及包含多个驱动电机系统和/或多个传动系的单个电动动力系。

说明:该类型结构的驱动形式可能是前置前驱或后置后驱或四驱。A和B的位置可以互换。
图A.1横置结构
说明:该类型结构的驱动形式可能是前置前驱、前置后驱、中置后驱、后置后驱或四驱。
图A.2纵置结构
说明:该类型结构的驱动形式为轮边驱动。A和B的位置可以互换。
图A.3轮边结构
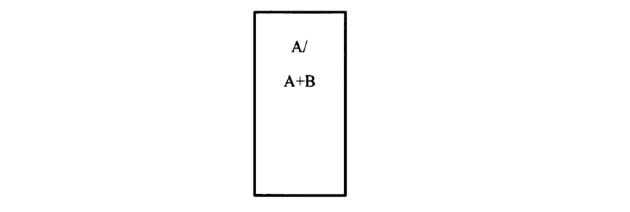
说明:该类型结构的驱动形式是轮毂驱动。
图A.4轮毂结构
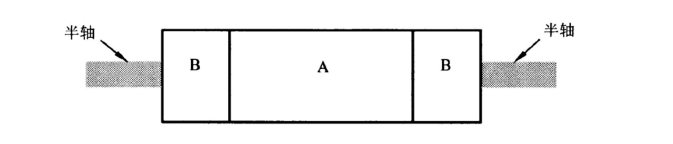
说明:该类型结构的驱动形式是车桥式驱动,有无B均可。
图A.5车桥式结构
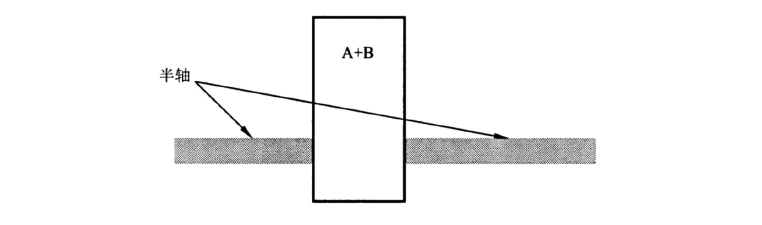
说明:该类型结构的驱动形式是混合动力驱动,电动动力系集成到变速器壳体内。
图A.6混合动力结构
附 录 B
(规范性)
声压级测定传声器的位置
B.1 根据不同的被测件结构,声压级测定的传声器布置有3种方案,见图B.1、图B.2和图B.3。测量距离a推荐1m或0.5m。
B.2 附录A中的图A.1~图A.4和图A.6的驱动电机系统可按照方案一进行测量,图A.5的驱动电机系统可按照方案二进行测量。
B.3 附录A中的图A.1~图A.3和图A.5的电动动力]系可按照方案二进行测量,附录A中的图A.4的电动动力系可按照方案一进行测量,图A.6的电动动力系可按照方案三进行测量。
说明:1、2、3号传声器处于同一水平面内,4号传声器垂直于该水平面,四个传声器均垂直于被测件表面并指向几何中心,且与被测件表面的距离均为a。h代表被测件几何中心到地面的距离。
图B.1方案一
说明:1、2、3、4号传声器处于同一水平面内,5号传声器垂直于该水平面,五个传声器均垂直于被测件表面并指向几何中心,且与被测件包络面的距离均为a。h代表被测件几何中心到地面的距离。
图B.2方案二
说明:1、2、3号传声器处于同一水平面内,4号传声器垂直于该水平面,四个传声器均垂直于被测件表面并指向几何中心,且与被测件包络面的距离均为a。
图B.3方案三
---END---
直播推荐

识别二维码,预约观看



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
