




 广告
广告





















































多维恶劣场景自动驾驶车辆安全行为决策方法
2021-12-30 00:48:19· 来源:清华大学苏州汽车研究院

目前L3级或更高级自动驾驶的传感器在恶劣天气环境中由于感知能力受到环境因素的影响而无法正常工作。在路面湿滑的条件下,易发生打滑等安全隐患。在此之前只单独
目前L3级或更高级自动驾驶的传感器在恶劣天气环境中由于感知能力受到环境因素的影响而无法正常工作。在路面湿滑的条件下,易发生打滑等安全隐患。在此之前只单独考虑车辆在一个维度的交通场景下的表现,具有片面性与不确定性。现将两个维度的交通场景进行耦合处理,综合多维度的感知车辆的行驶环境。降低车速可以提高处于恶劣环境中自动驾驶车辆的感知能力,以及保证行车安全。本文从预期功能安全角度出发,考虑了道路层和气象层两个维度,提出了一种基于有限状态机的自动驾驶决策控制方法。
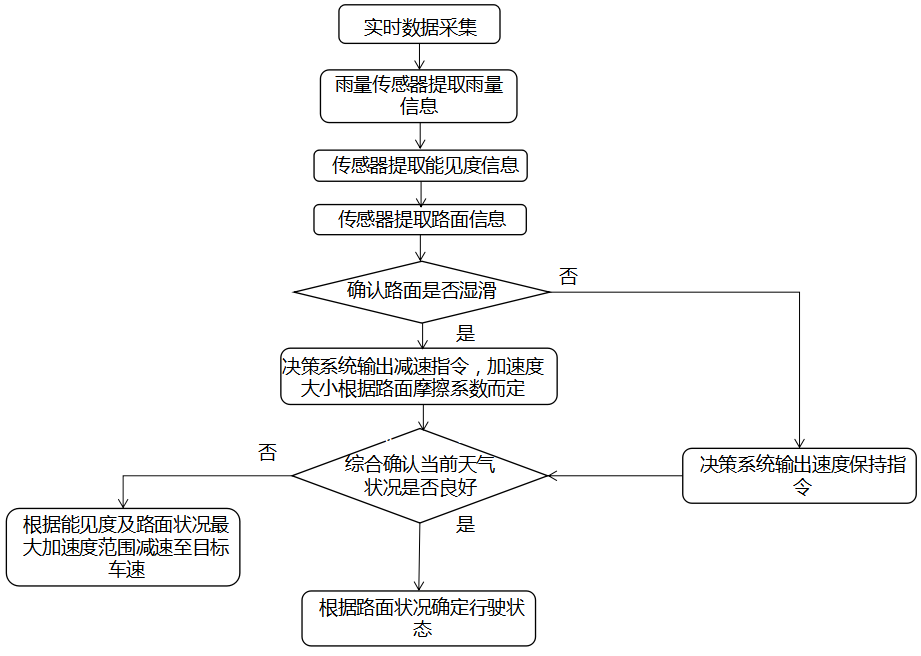
自动驾驶车辆安全行为决策流程图
环境认知方法
本文提出的方法可以识别出雨量大小、环境能见度大小以及路面湿滑程度等环境信息,根据感知得到的环境状态信息通过有限状态机决定自动驾驶车辆在不同环境条件下的行驶状态。
具体方法流程为:
1.通过实时雨量传感器来实时感知所处环境雨量大小,并输出雨量大小信息,摄像头传感器获取所处环境能见度情况及路面湿滑程度等环境信息。
2.根据传感器输出提供的雨量大小信息、能见度信息及路面湿滑程度信息通过深度学习图像识别算法提取能见度大小及路面湿滑程度大小相关信息,进行分类操作后,推测雨量大小状态、能见度状况及路面的湿滑程度状态等相关信息,其中雨量大小信息是指雨量传感器实时感知到的所处环境的雨量大小;能见度信息是指所处环境能见度大小参考值及能见度的置信度;路面湿滑程度信息是指前方路面反光值、路面反光值的权值、前方路面图像的平均锐度、平均锐度的权值。
(1)判断天气状况是否为雨量过大影响传感器的性能:当 P1 - P2 > 0时,则说明所处的天气为雨量过大,自动驾驶车辆的传感器性能受到限制;若 P1 - P2 < 0时,则说明雨量状态在自动驾驶车辆传感器的可接受范围内,不会影响传感器的性能,车辆可以正常行驶。
P1:雨量传感器输出的雨量大小信息;P2:预先设定的雨量阈值。
(2)判断能见度状况是否影响传感器性能的方法为:当 Q1 * Q2 > 0.9时,则说明环境能见度较差,自动驾驶车辆传感器的性能受到限制,无法正常工作;当 Q1 * Q2 < 0.9时,则说明环境能见度在传感器正常工作的范围内,性能不会受到影响。
Q1:摄像头传感器输出的环境能见度状况,其能见度等级定义为:极差、一般、良好。不同能见度下摄像头传感器对应的视距为Lclear、Llight、Lheavy,当能见度等级为极差时,Q1 = 0;当能见度等级为其他情况时,Q1 = 1。
Q2:Q1的置信度。
(3)判断路面湿滑程度是否影响传感器性能的方法为:路面反光的的计算方法为:把图像传感器获取的道路图像分成n个大小相同区域(i = 1,2,3......n-1,n),平均亮度Hi为对每一个区域的灰度均值;将图像的上半部分区域所有的平均亮度值相加得到Xu,剩下区域为Xd。则路面反光度的计算公式为Ψ=Xu - Xd。
路面平均锐度计算方法为:根据获取的道路图像,求其对应的梯度图像,计算梯度图像中的任意一点的八邻域中每个点值乘以该点与八邻域中每个点距离,所有的乘积之和就是图像中任意一点的锐度值,将所有的锐度值相加除以点的个数就可得到路面图像的平均锐度Φ。
当α*Ψ-β*Φ-Γ> 0时,则说明前方路面湿滑程度较高,自动驾驶车辆行驶在该路面上时附着力较小,容易发生侧滑。当α*Ψ-β*Φ-Γ< 0时,则说明前方路面湿滑程度较低,车辆不会发生打滑。
Ψ:路面的反光度;α:路面反光度的权值;Φ:路面图像的平均锐度;β:路面平均锐度的权值;Γ:预先设定的路面湿滑程度阈值。
有限状态机
根据雨量状态、能见度状态及路面湿滑程度状态通过有限状态机决定自动驾驶车辆的行驶状态。先判断路面状况,确认当前路面状态下的最大摩擦系数进而确定最大制动加速度,再根据最大制动加速度求得不同能见度环境下的车辆目标速度。当自动驾驶车辆行驶到雨量较小或天气晴朗、能见度较高及前方路面湿滑程度较低或路面干燥的时候,自动驾驶车辆由低速行驶状态进入正常速度行驶状态,其行驶示意图如图2所示。
1、不同湿滑路面的加速度确定
(1)自动驾驶域控制器通过各个传感器读取瞬时参数计算得出所需制动力F。
(2)自动驾驶域控制器将制动力通过防抱死系统按照特定比例加载到每个车轮的制动器,域控制器实时得到每个车轮的滑移率,记录每个车轮的滑移率为0.03,0.06,0.1时的角加速度以及实时制动力。将制动力F通过ABS防抱死系统加载到每一个车轮制动器上,分配到两个前轮上的制动力都为0.3F,两个后轮上的制动力都为0.25F。因在湿滑路面上行驶,要保证行驶安全,四个车轮最终的最佳滑移率都要大于0.1。
(3)自动驾驶域控制器根据记录的滑移率小于等于0.1时的每个车路的实时制动力以及角加速度信息,通过Kienche模型求出参数P1、P2,进而根据该模型计算得出当前路面状况下的最佳滑移率λa和最大摩擦系数μmax。Kienche模型计算P1,P2的具体步骤为:

μ0.03,μ0.06,μ0.1分别代表当滑移率是0.03,0.06,0.1时对应的车轮与地面的摩擦系数。

α0.03,α0.06,α0.1分别对应不同滑移率的车轮角加速度;R为车轮半径;J为车轮的转动惯量;Tb为制动力矩;Fz为路面接触力。则通过Kienche模型计算得到的当前路面状况的最佳滑移率λa和最大摩擦系数μmax为:

(4)自动驾驶域控制器将上面计算得出的当前路面状况的最佳滑移率λa加载到防抱死系统中,使得防抱死系统控制车轮的滑移率保持在λa的一定范围内,与此同时,车载域控制器依据车速传感器得到的车辆速度信息通过差分处理得到此时的自动驾驶车辆的加速度αr。
湿滑路面的摩擦系数取值范围为μ=(0.2,0.55),考虑μ的值分别为μ1=0.2~0.3,μ2=0.3~0.4,μ3=0.4~0.55时最大加速度值αr为(α1,α2,α3)。
2、不同能见度下的目标速度确认
设自动驾驶车辆在不同能见度下的可视距离为Li,以可视距离作为车辆的制动距离,根据加速度公式可得不同能见度情况下的目标车速为:Vi=√(V0+2aiLi)。V0为车辆初始速度,ai为不同路面状况的最大加速度。
根据能见度的不同确定车辆的行驶速度。当Li依次为Lclear、Llight、Lheavy时,湿滑路面情况下的目标速度Vi的取值为(V1,V2,V3),干燥路面情况下的目标速度取值为(V4,V5,V6)。
3、状态机转换条件确认
不同环境因素下自动驾驶车辆行驶状态转换条件:
z = 0 :前方路面干燥,路面摩擦系数较大,执行器外部条件良好;
z = 1 :前方路面湿滑程度较高,路面摩擦系数较低;
μ1:路面摩擦系数为0.2~0.3,此时车辆最大加速度为α1;
μ2:路面摩擦系数为0.3~0.4,此时车辆最大加速度为α2;
μ3:路面摩擦系数为0.4~0.55,此时车辆最大加速度为α3;
Lclear:环境能见度为500m~1000m,此时在湿滑路面上车辆的目标速度为V1,在干燥路面上车辆的目标速度为V4;
Llight:环境能见度为200m~500m;此时在湿滑路面上车辆的目标速度为V2
,在干燥路面上车辆的目标速度为V5;
Lheavy:环境能见度50m~200m;此时在湿滑路面上车辆的目标速度为V3,在干燥路面上车辆的目标速度为V6;
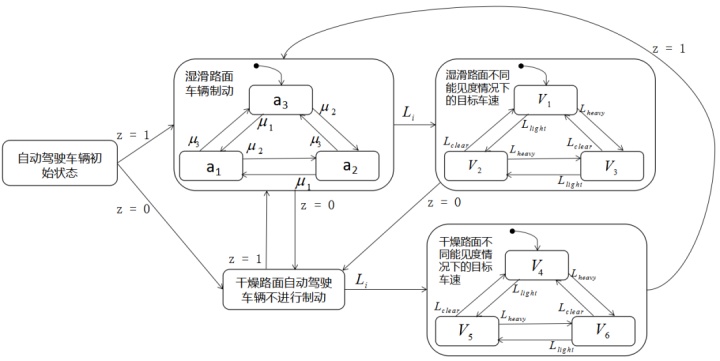
图2 不同环境因素下状态机切换示意图
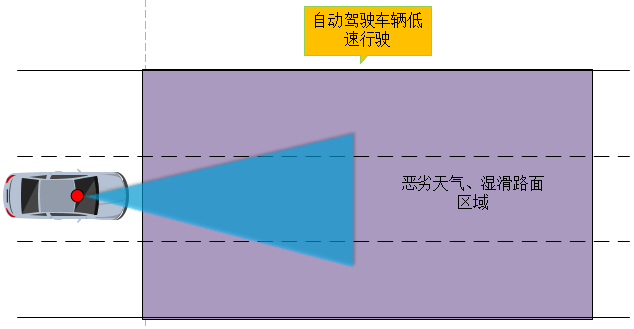
图3车辆行驶在恶劣天气、湿滑路面区域
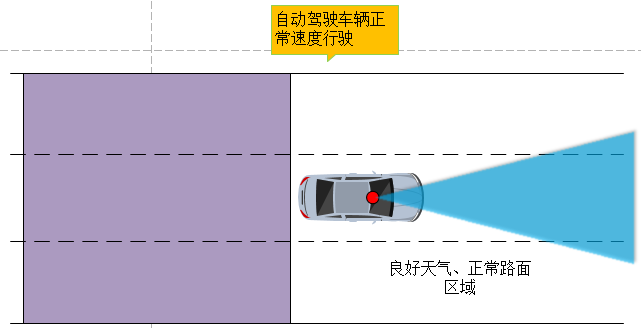
图4车辆行驶在良好天气、正常路面区域
在不同的天气环境下和不同的路面情况下,通过有限状态机根据不同的触发条件转换自动驾驶车辆的行驶状态来保证本车的安全正常行驶,即使在恶劣的环境条件下自动驾驶车辆能够弥补因传感器性能不足造成的严重影响,能够自主做出决策正常行驶。
参考文献
[1] 刘凯, 陈慧岩, 龚建伟, 等. 高速无人驾驶车辆的操控稳定性研究[J]. 汽车工程, 2019, 41(5): 514-521.
[2] ISO. Road Vehicles Safety of the Intended Functionality: ISO/PAS 21448: 2019[S]. Switzerland: ISO, 2018.
[3] 智能车辆驾驶行为决策方法研究[J]. 赵志成,华一丁,王文扬,陈正. 现代信息科技. 2019(24)
[4] 陈俊周,袁萍,吴晓,何俊彦,彭强. 一种基于道路图像的路面湿滑检测方法[P]. 四川:CN104200673A,2014-12-10.
[5] YANG H J, JANG H, JEONG D S. Detection algorithm for road surface condition using wavelet packet transform and SVM[C]. The 19th Korea ⁃ Japan Joint Workshop on Frontiers of Computer Vision. IEEE, 2013: 323-326.
[6] PAN G, FU L, YU R, et al. Winter road surface condition recognition using a pretrained deep convolutional neural network[R]. 2018.
[7] 冀杰, 黄岩军, 李云伍, 等. 基于有限状态机的车辆自动驾驶行为决策分析[J]. 汽车技术, 2018(12).
[8] 张冬忠 基于模糊神经网络的智能车辆自动驾驶方法研究[D]. 西安: 长安大学, 2017.
[9] 邢智超, 王国业, 何畅然, 等. 汽车双转鼓惯性试验台等效路面附着理研究[J]. 汽车工程, 2019, 41(4): 455-461.
[10] 黄晓明, 赵润民, 黄若昀,等. 一种无人驾驶车辆在雨雪湿滑路面紧急制动时的制动力控制方法:, CN109080608A[P]. 2018.
[11] 张安静,董立强,姜海峰,彭丽秀. 基于滑移率的汽车侧向稳定性控制策略研究[A].重庆汽车工程学会,2020:10.
[12]用于车辆稳定性控制的直接横摆力矩及车轮变滑移率联合控制研究[J]. 余卓平,高晓杰,张立军. 汽车工程. 2006(09)
[13] Ryosuke Matsuzaki,Kazuto Kamai,Ryosuke Seki. Intelligent tires for identifying coefficient of friction of tire/road contact surfaces using three-axis accelerometer[J]. Smart Materials and Structures,2015,24(2):



 广告
广告 



最新资讯
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
