




 广告
广告





















































是德科技推出雷达场景仿真器解决方案,最多仿真512个雷达目标,仿真距离最近1.5米
2021-12-16 23:49:57· 来源:汽车测试网

完全自动驾驶汽车这一愿景正在逐渐接近现实,届时不仅有望提高交通运输系统的整体效率,还能提升驾乘人员的安全。事实上,据美国交通部研究人员估计,自动驾驶汽
完全自动驾驶汽车这一愿景正在逐渐接近现实,届时不仅有望提高交通运输系统的整体效率,还能提升驾乘人员的安全。事实上,据美国交通部研究人员估计,自动驾驶汽车通过避免人为错误导致的事故,最高可以将交通事故的死亡人数降低 94%。
然而,要让这一愿景变成现实,汽车制造商需要将自动驾驶等级从当前汽车工程学会(SAE)定义的 2+/3 级提升至 5 级(图 1)。这样会带来一系列独特挑战,需要多项技术进步作为基础。
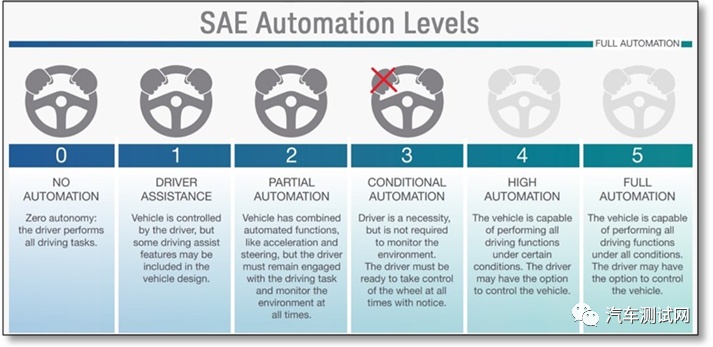
图 1. SAE 定义的自动驾驶等级
来自未来的挑战
我们必须攻克多项技术难关,才能提升自动驾驶等级。这些难关包括:缩小道路测试与软件仿真测试之间的差距。当前的传感器和控制模块是在具有软件在环测试功能的仿真环境中进行测试。尽管软件仿真很有用,但它无法完全重现现实情况以及可能出现的不完美的传感器响应。全自动驾驶汽车必须知道如何应对这样的情况。
·通过对原型车或合法上路车辆中集成的完整系统进行道路测试,汽车制造商能够对最终产品的性能进行验证,然后再将它们推向市场。道路测试至关重要,也是开发过程中不可或缺的一环,但考虑到测试成本、测试所需时间和测试可重复性等一系列问题,完全依赖道路测试变得不切实际。如果采用这种方式,车辆需要经过几百年的测试才能达到足够的可靠性,万无一失地安全行驶在城市和乡村道路上。在真实条件下训练先进驾驶辅助系统(ADAS)/自动驾驶(AV)算法。车载雷达测试对于训练自动驾驶算法具有重要意义。这些算法使用车载雷达传感器获取的数据做出决策,指示车辆在遇到特定行驶状况时应该做出何种响应。如果算法没有经过正确训练,它们可能会做出意外决策,危及驾乘人员或行人安全。
我们可以设想一下驾驶员在开车时需要做出哪些决策。成为一名优秀的驾驶员往往需要时间和经验的沉淀。将自动驾驶技术提升一个台阶则需要依靠复杂的系统,这些系统的能力应超越最优秀的人类驾驶员。传感器、精准算法与强大处理器的结合是实现自动驾驶的关键因素。传感器可以感知周围的环境,处理器和算法可以做出正确的决策,并确保遵守道路交通规则。我们必须确保新 ADAS 功能是安全可靠的。采用不成熟的系统过早进行道路测试会有很大风险。我们需要能够仿真真实场景,对实际采用的传感器、电子控制单元(ECU)代码、人工智能(AI)逻辑等部分进行验证。尽早测试更多场景能够让 OEM 清楚地了解何时可以完成开发,何时可以信心充分地发布 ADAS 功能。
当前解决方案的不足之处
当前的测试系统无法有效应对以下这些挑战。有些测试系统使用多个雷达目标仿真器(RTS),每个 RTS 都向雷达传感器呈现多个点目标,并通过机械移动天线来仿真水平位置和垂直位置。这种机械式的自动化操作延缓了整体测试速度。还有些测试方案采用了只包含少数几个 RTS 的天线墙。这意味着目标可以出现在场景中的任何地方,但不能同时出现。在静态或准静态环境下,这种方法可以测试横向移动的少数几个目标,但受到机械臂速度的限制。
现有的雷达传感器测试解决方案的视场(FOV)也很有限,无法分辨距离小于 4 米的目标。在测试雷达传感器时,如果目标数量不够多,就无法反映出完整的驾驶场景,重现真实环境中的复杂情况。
应对挑战
为了实现全自动驾驶愿景所需的 ADAS 功能,需要使用可靠的雷达传感器和算法。在实验室中执行全场景仿真对于开发这些雷达传感器和算法至关重要。是德科技首次推出的全场景仿真器结合使用几百个微型射频(RF)前端构成一个可扩展的仿真屏幕,可呈现最多 512 个目标,距离最近可达到 1.5 米。
成功打造这个解决方案需要在两项关键技术上取得突破性进展,一项是专用的微型射频前端,每个前端均自带天线,8 个这样的射频前端集成到一块电路板上(图 2)。然后,64 块电路板呈半圆形阵列排列,构成仿真屏幕。
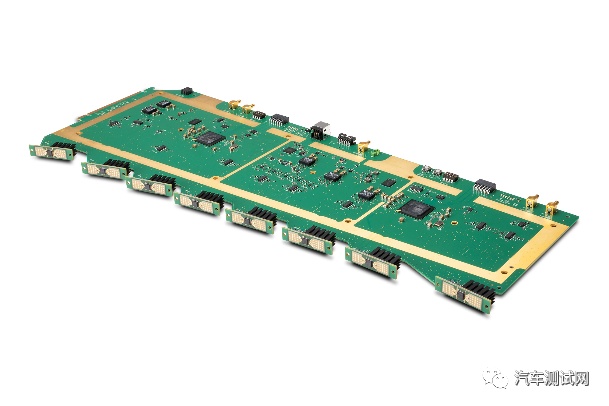
图 2. 紧凑型 RSE 射频前端
是德科技雷达场景仿真器使汽车制造商可以在实验室中完成以往在道路上才能实施的复杂驾驶场景测试,因此可以加快测试速度。
关键特性与优势
是德科技公司最新推出的雷达场景仿真器,采用了专利技术,不是仿真单个目标而是仿真整个交通场景来进行目标探测(图 3)。这种方法给汽车 OEM 带来了许多关键优势:
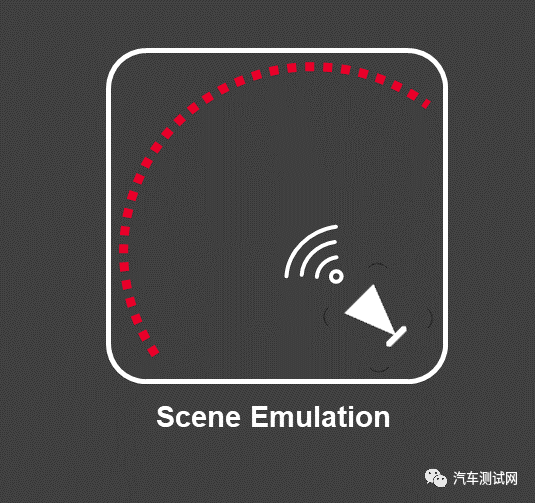
图 3. 目标仿真与场景仿真对比
· 视野更宽广:雷达场景仿真器不仅可以帮助雷达传感器在更宽的连续视场内发现更多目标,还支持仿真近距离目标和远距离目标。这样可以避免雷达视野遗留盲区,还能提升算法训练效果,从而高效探测和分辨密集、复杂场景中的多个目标。因此,自动驾驶汽车可以基于全局情形而不仅仅是测试设备所得到的信息来做出决策。
- 使用 512 个独立目标以及 +/-70°(水平)和 +/-15°(垂直)的连续视场(FOV),全面彻底地训练雷达传感器和系统。
- 生成距离在 1.5 米到 300 米、速度在 0 到 400 kph 的静态目标和动态目标。
- 适用于角度分辨率小于 1 度的多目标、多角度场景。
- 通过逼真的干扰测试,仿真射频设备密集的复杂城市场景。
· 测试复杂的真实环境:在测试雷达传感器时,如果目标数量不够多,就无法反映出完整的驾驶场景,重现真实环境中的复杂情况。是德科技雷达场景仿真器允许汽车制造商在实验室内设定各种环境条件变量、交通密度、速度、距离和目标总数,真正仿真现实驾驶场景。无论是常见情况还是极端情况,都可以提前进行测试,最大限度降低风险。
· 加快算法学习速度。是德科技雷达场景仿真器为在实验室中测试复杂场景提供了一个确定的真实环境,此前我们只能在道路上进行这样的场景测试。借助其开创性的测试方法,汽车制造商能够使用可重复的高密度复杂场景提前进行测试,场景中可以包括静止目标或运动目标,还包含各种可变环境特征,从而显著提高 ADAS/AV 算法学习速度,避免人工测试或机械式自动化测试导致的效率低下问题。
· 更快更早地测试更多场景,提振对所需 ADAS 功能的信心。
- 通过基于动态分辨率自适应的渲染,轻松检测 ADAS 软件的遗漏或不当行为
- 仿真复杂的真实场景,包括具有大型平面目标的场景
- 生成逼真的驾驶场景,例如包含多个目标的高速穿插交通场景

是德科技雷达场景仿真器支持客户在实验室中仿真复杂的真实驾驶场景并进行测试,最多可以仿真512个雷达目标,仿真距离最近可达到1.5米。
汽车公司知道自动驾驶算法不仅测试起来非常复杂――还会涉及安全问题。是德科技的雷达场景仿真器非常适合坚持“安全第一”的自动驾驶技术开发人员使用。是德科技的雷达场景仿真器采用全场景渲染方法,在宽广的连续视场(FOV)内仿真远处和近处的目标,使客户能够利用极其复杂的多目标场景更快测试自动驾驶系统中的车载雷达传感器。
此雷达场景仿真器是是德科技自动驾驶仿真(ADE)平台的一个组件,该平台由是德科技、IPG Automotive 和 Nordsys 通过多年合作共同打造。ADE 平台通过渲染预先定义的使用场景,为车载传感器和子系统――例如全球卫星导航系统(GNSS)、车联网(V2X)、摄像头和雷达――提供时间同步输入,以此训练辅助驾驶(ADAS) 和 自动驾驶(AD) 软件。有了是德科技自动驾驶仿真(ADE)这个开放平台 ,汽车制造商及其合作伙伴将能够集中精力开发和测试 ADAS/AD 系统与算法,包括传感器融合和决策算法。该平台还可以与商用 3D 模型、硬件在环(HIL)系统以及现有的测试和仿真环境相集成。
是德科技雷达场景仿真器和自动驾驶仿真平台为汽车制造商提供了一个理想的解决方案,可以帮助他们实现新的 ADAS 功能,最终实现全自动驾驶的愿景。
扫描下方二维码
了解关于是德科技雷达场景仿真器的更多信息:

END
【直播】汽车高速数字总线测试技术讲解
时间:12月21日 晚上19:30 – 21:00



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
