




 广告
广告





















































CARAMEL车载GPS位置完整性检测
2021-12-05 19:33:52· 来源:轩辕实验室

*本文来自轩辕实验室杨杰森的研究成果和学习笔记H2020-CARAMEL项目的主要目标是解决现代车辆所采用的新技术领域所带来的网络安全漏洞,其中包括先进的人工智能和
*本文来自轩辕实验室杨杰森的研究成果和学习笔记
H2020-CARAMEL项目的主要目标是解决现代车辆所采用的新技术领域所带来的网络安全漏洞,其中包括先进的人工智能和机器学习技术。因此,CARAMEL增强了对与自动驾驶、电动汽车智能充电以及车辆之间或车辆与路边基础设施之间通信相关的威胁的保护。这一部分介绍了CARAMEL项目利用车辆内部传感器进行GPS欺骗检测的模块。
在这种方法中,CARAMEL系统使用贝叶斯滤波技术计算车辆的备选定位,以检查GPS测量的完整性。所提出方法的基本思想是为不依赖GPS测量的特定车辆获得后退定位技术。这个方法是模块化的,如下图所示。
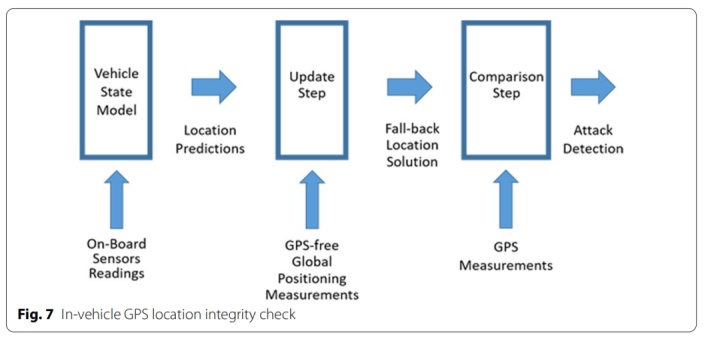
为了实现回退定位技术,建议的贝叶斯滤波器由以下两个基本步骤组成:(1)预测步骤;(2)更新步骤。对于预测步骤,通过描述基本的物理定律来描述车辆的运动,并通过车载传感器测量获得未来的车辆位置。在更新步骤中,车辆的预测位置与由车辆内的替代位置系统获得的无GPS的全球位置测量值相融合,然后将所提出的贝叶斯滤波器的输出与实际的GPS测量值进行比较,以检测持续的定位偏差,从而可能出现GPS欺骗攻击。根据更新步骤中使用的全球位置测量值的质量,CARAMEL系统可能会恢复到后退位置解决方案,以便在攻击发生时暂时引导车辆。值得注意的是,CARAMEL系统采用的解决方案适应可用的车载传感器和可用的无GPS全球位置测量。

软件可访问CAN总线数据,以及转向角(α)、偏航率(φ˙)和车轮速度(v)传感器数据。利用这些传感器信息,可以根据基本的物理定律建立一个车辆系统状态的非线性模型。这种非线性模型利用了一个基本的假设,即车辆的运动可以很好地近似于自行车,即将后轴和主轴折叠成一个单点。根据所采用的自行车模型,车辆的运动模型可以考虑到所涉及的惯性力,如车轮在路面上的摩擦力。如果认为车架方向为x轴,则其车架参考系统中车辆位置和速度的一步预测为
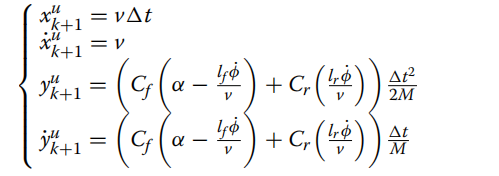
其中和分别表示前轮和后轮距离质量重心的距离,M为车辆的质量,和表示前后轮的角落度。
针对车辆车身运动的预测,采用了简单的坐标变换,得到了全局地理参考系统中的一步预测,在不相关和高斯测量噪声的假设下,采用贝叶斯滤波器,即扩展卡尔曼滤波器(EKF)方法,计算了估计车辆系统状态的相关协方差。EKF还用于更新预测的系统状态和不gps位置测量的不确定度。在EKF的更新步骤中,通过机会信号(SoO)获得车辆的全局位置测量。(机会信号是指来源于调幅/调频收音机、蜂窝电视、电视信号等很容易获得的信号)扩展卡尔曼滤波器(EKF)还用于更新预测的系统状态和不GPS位置测量的不确定度,如果SoO更新步骤的误差近似为高斯分布,正如在CARAMEL中假设的那样,后退解的输出提供了车辆位置的近似值,同时也遵循高斯分布;后退解的输出是车辆位置估计的平均值[,],以及相应的协方差矩阵。
事实上,GPS接收器不仅为车辆提供了一个近似的位置[,],而且还提供了一个不确定性分数,可以转换为一个协方差矩阵,如果GPS测量值也近似为高斯分布,那么两个位置测量值之间的自然比较就用巴氏距离( Bhattacharyya distance)表示(巴氏距离计算两个统计分布的重叠量,因此,测量它们的相似性),如果两个分布之间的巴氏距离超过预定的阈值T,则发出警报。因此,为了减少误报警的数量,得到攻击阈值T,即GPS测量值与后退定位技术之间距离的第99百分位数,即根据设计,误报警的数量等于所发出报警的1%。特别地,在接收到新的GPS测量值的每个时隙k处,计算以下的平均巴氏距离:
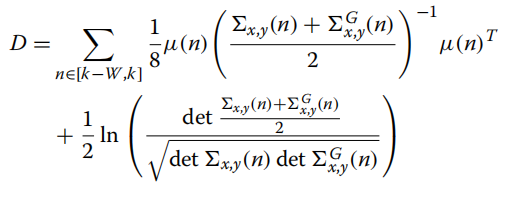
其中,巴氏距离是在W秒的滑动窗口内收集的样本的平均值。通过滑动窗口机制,可以提高攻击检测率,过滤掉欺骗GPS测量值。然而,在设置W时,必须考虑到滑动窗口的长度和所描述的攻击检测机制对GPS欺骗攻击的快速反应的能力之间的交易,也就说增大滑动窗口W可能会增大检测欺骗攻击的时延.
图8描述了:(1)车辆的实际轨迹;(2)后退位置解决方案,其中SoO被模拟为具有非常大方差的无GPS测量,即;(3)车辆接收的GPS测量值(分布为,在模拟时间的前半段后被恶意实体攻击,其发送偏差等于15米。
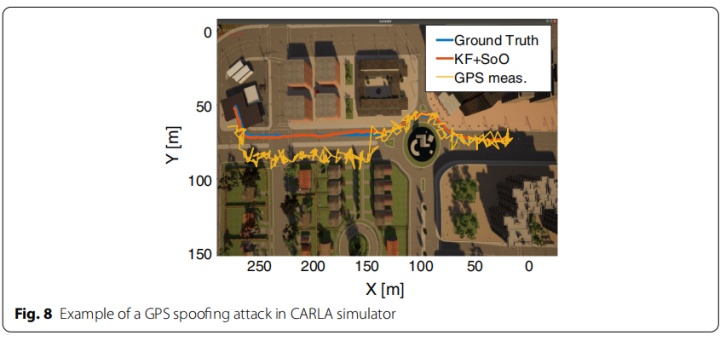
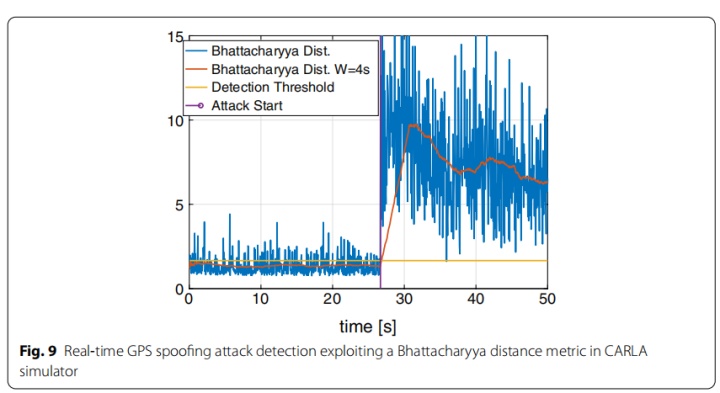
图9显示了CARAMEL中的检测方法的输出。正如预期的那样,瞬时巴氏距离呈现出很高的可变性,使得检测到可能的攻击更加隐蔽。然而,平均巴氏距离D,滑动时间窗为W=4s,大大简化了该过程,CARAMEL方法能够检测到恶意修改的97%的GPS测量值
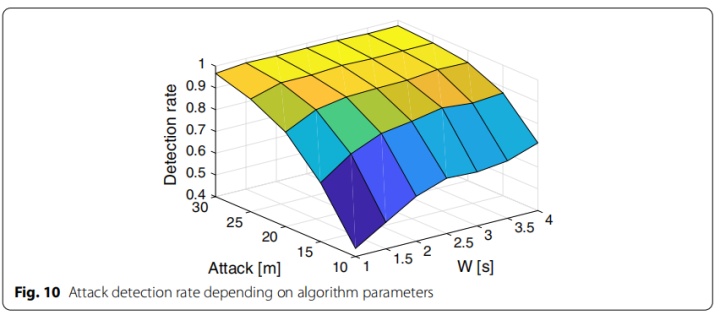
最后,图10显示了一个大型模拟活动的结果,其中滑动窗口W的长度和用于修改GPS测量的偏差模块都随着预先设置的间隔而变化。在某些模拟设置中,篡改GPS测量的检出率高达98%。此外,一个更大的滑动窗口W提高了该方法的性能,特别是当引入的攻击偏差小于SoO位置的不确定性时。



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
