




 广告
广告





















































混联式混合动力汽车模式切换动态特性研究
2021-11-22 09:54:50· 来源:驱动视界

1. 研究背景混合动力汽车振动噪声特性:(1)掩蔽效应消失。发动机不工作,其它噪声会变得更加明显,伴随着发动机起、停过程,影响乘坐舒适性;(2)振动噪声激励源
1. 研究背景
混合动力汽车振动噪声特性:
(1)掩蔽效应消失。
发动机不工作,其它噪声会变得更加明显,伴随着发动机起、停过程,影响乘坐舒适性;
(2)振动噪声激励源的复杂化。
在传统汽车振动噪声源的基础上,又增加了电机,电池等电驱动的辅助系统;
(3)振动噪声传递路径的多样化。
由于混合动力汽车在传动系统结构上的改变和驱动模式的增加,其振动噪声的传递路径也变得更加多样化。
(4)驱动模式切换中发动机起、停过程对乘坐舒适性影响较大。
针对双电机深度混合动力汽车模式切换过程中振动幅值过大的问 题 , 本研究通过建立了 ADAMS 与MATLAB/Simulink联合仿真模型,实现深度混合动力系统驱动模式切换过程动态响应联合仿真分析;从激励源与传递路径出发,抑制混合动力驱动模式切换下的振动幅值。
2. 动力学建模
系统结构介绍
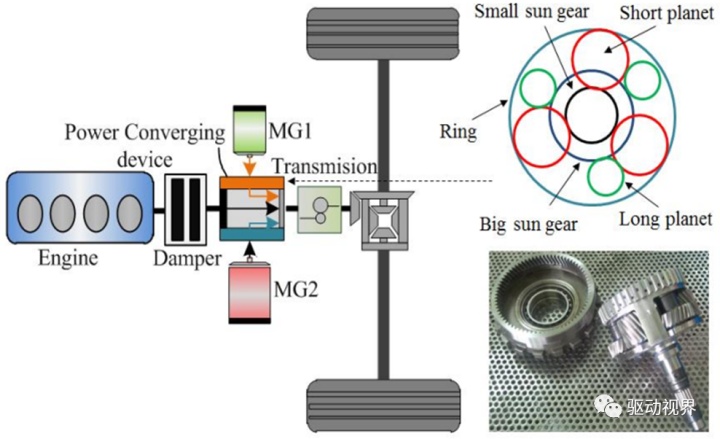
双电机深度混合动力系统
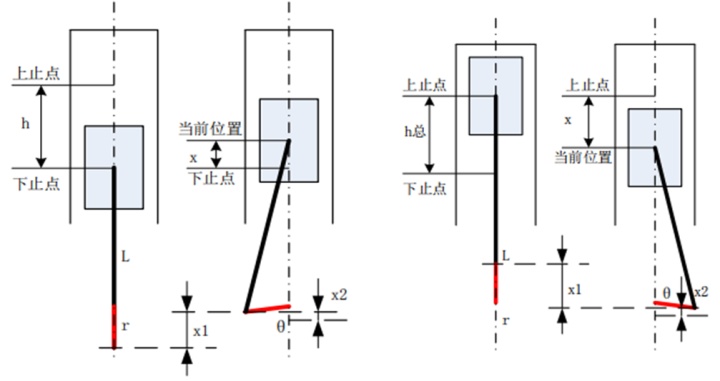
发动机激励建模
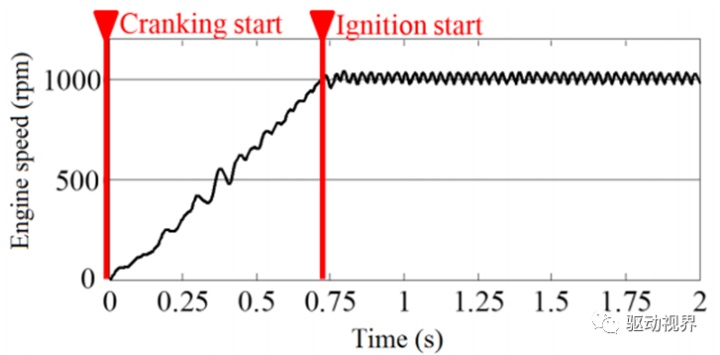
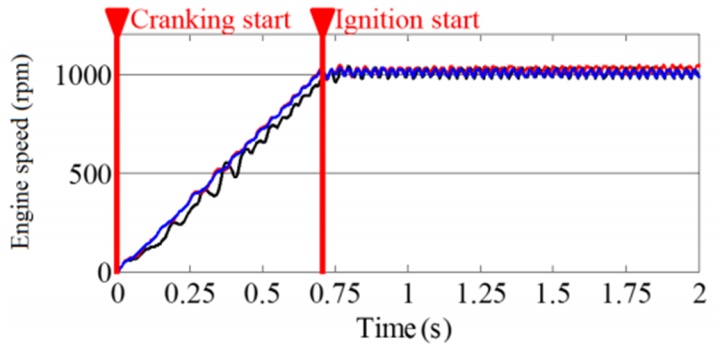
发动机的起停过程,可以分为两个部分。第一部分是发动机的拖动阶段;第二部分是在发动机被电机拖动至怠速转速时的点火阶段,这一过程中,对输出扭矩产生波动的主要因素是发动机的燃烧力矩。
2. 动力学建模---发动机激励建模
发动机激励计算
单缸惯性力
惯性力矩(由作用在连杆上的分力产生)

压缩冲程气缸内的泵气阻力为
做功冲程气缸内的泵气阻力为
第一缸的泵气阻力
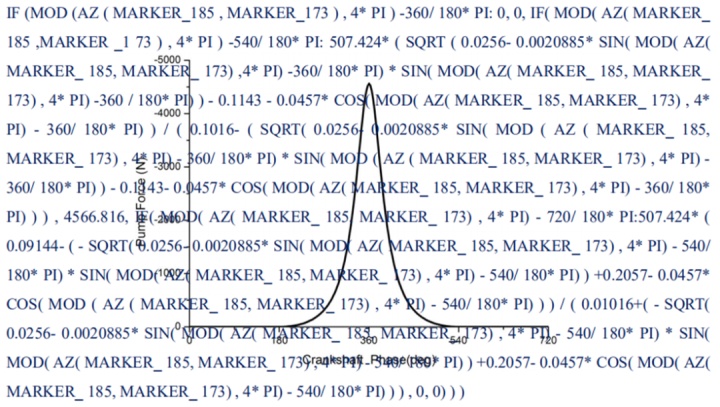
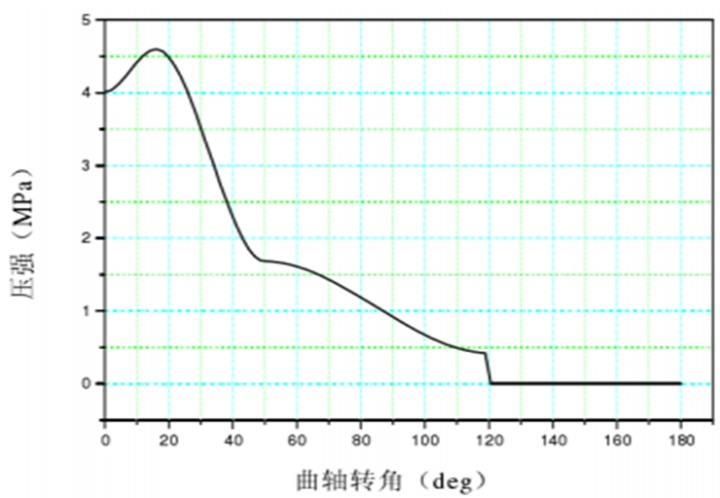
发动机缸爆力的建模
在点火后的做功冲程时,气缸内的气体可以达到的最大压力一般在3~6MPa之间。
活塞受到的平均燃烧压力可以通过活塞上、下表面的压力差与活塞截面积的乘积求得
可以表示为:
2. 动力学建模---整车动力学建模
ADAMS动力学建模




2. 动力学建模-整车动力学模型验证
模型验证
建立混动系统的虚拟样机模型,需要对该模型进行验证,这里通过对于整车模态的分析,验证虚拟样机模型。
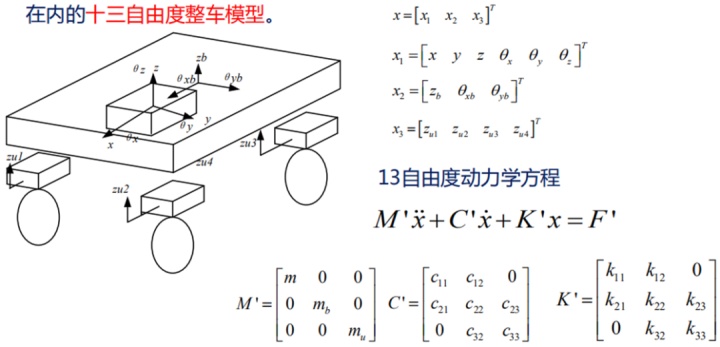
而对于整车模态分析,本研究考虑包括发动机在内的十三自由度整车模型。
十三自由度整车振动模型固有频率(Hz)
对发动机1000rpm和1400rpm时整车垂向振动进行傅里叶变换,进而得到共振频率,与十三自由度整车系统模态对比。
发动机1000rpm下整车垂向振动傅里叶变换

发动机1400rpm下整车垂向振动傅里叶变换
发动机1000rpm下整车垂向共振频率

发动机1400rpm下整车垂向固有频率(Hz)
对于1000rpm和1400rpm两个工况而言,前面的六阶频率基本相同,都是由动力总成模态激发出来的共振频率,而后面三个频率是激振力的一阶,二阶和四阶频率,与发动机转速成正比,1000rpm时的一阶频率为16Hz,1400rpm时的一阶频率为22.4Hz,与表中的数据对比,可以看出,这些模态误差基本一致,可以被认为是发动机转速控制过程中的误差造成的。
因此,可以认为整车模型建模满足动力学模型的要求
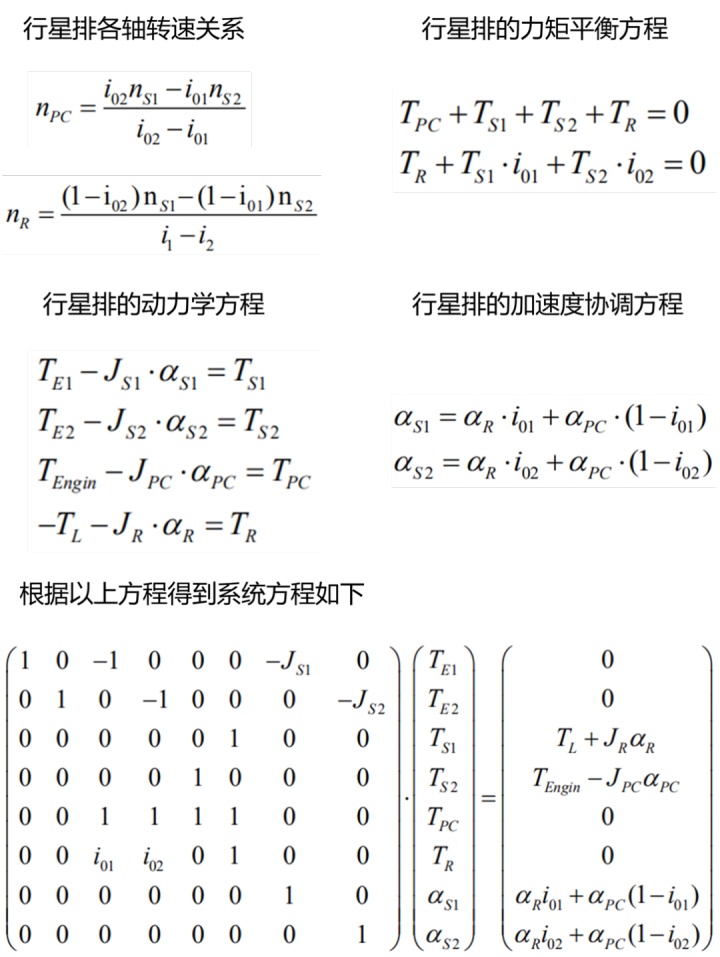
2. 动力学建模-扭振模型简化
分析发动机启停对整车振动的影响,可以从振动源以及传递路径入手,这里将传动系统简化分析,从传递路径出发来分析。
混合动力传动系可以等效为:

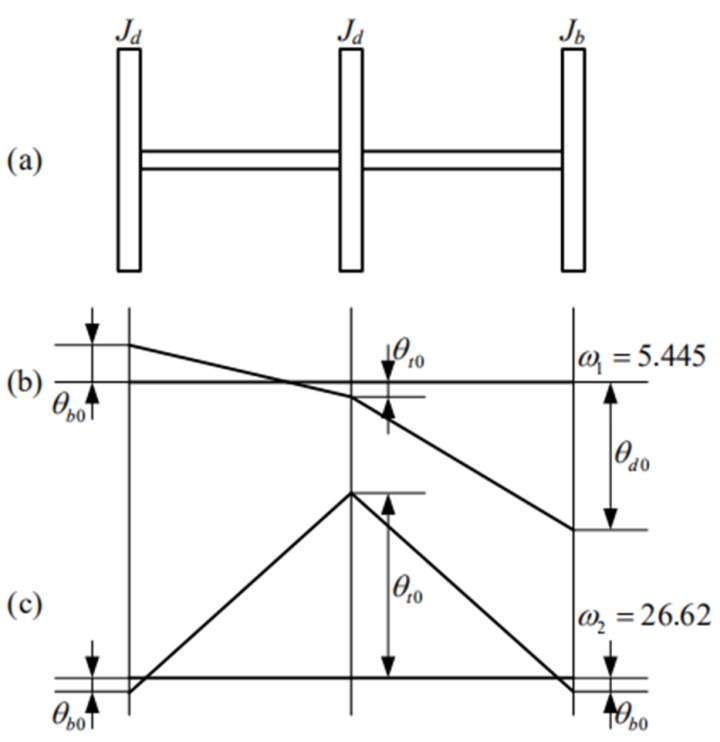
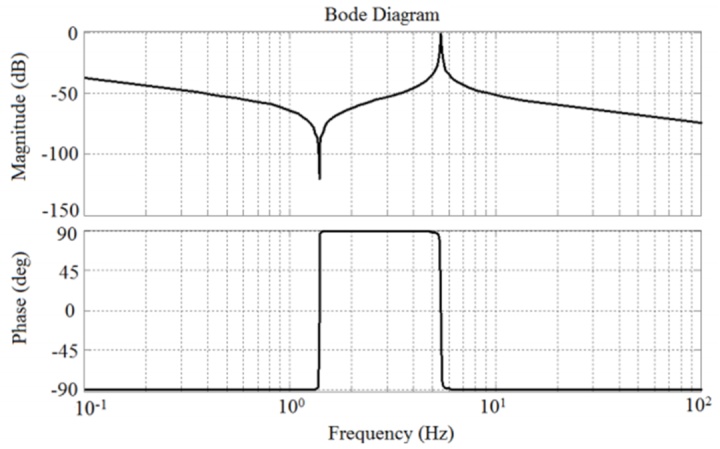
从图中可以看出两个共振频率分别在 5.445Hz 和26.62Hz处,系统主要的振动来源于5.445Hz这一频率,即车身所对应的共振频率,另一频率下的振动主要分布在车轮上,因此可以进一步简化模型。
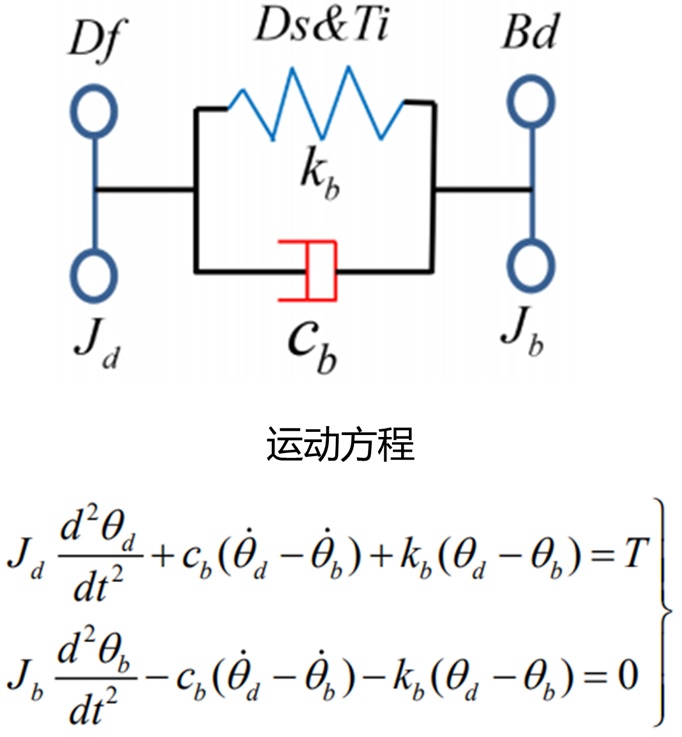
两质量系统简化模型
根据上面的分析,可以将另一个频率进行简化,将大太阳轮(S1),小太阳轮(S2),齿圈(R),主减速器(Rd)等效到差速器(Df) 上,并将车轮(Ti)和车身(Bd)等效成一个质量块。
得到两质量系统共振频率为5.44Hz。

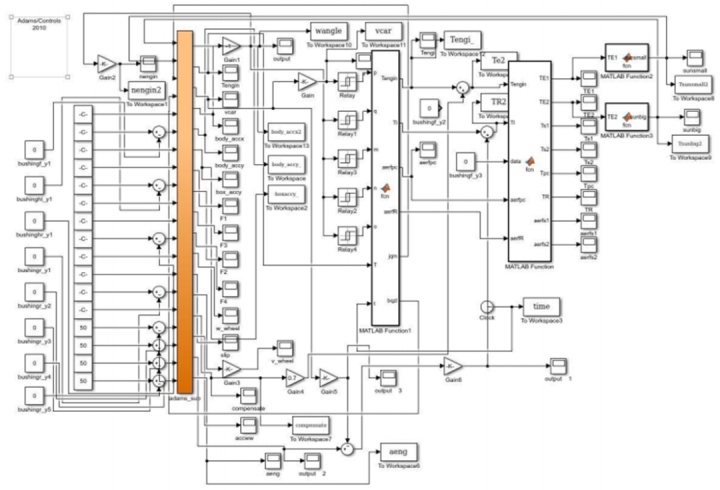
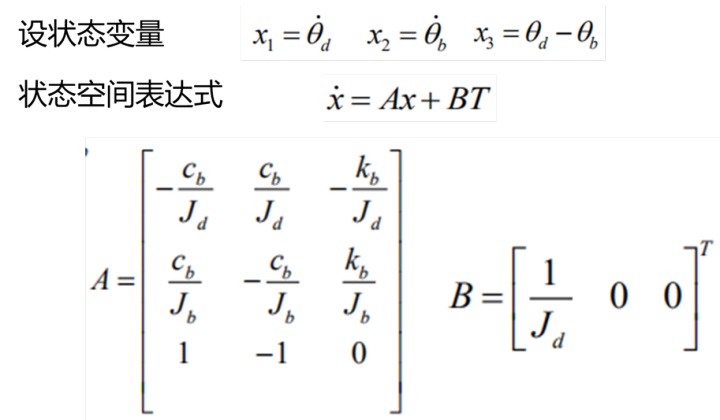
3. 系统控制建模
控制系统建模
MATLAB中建立的车辆模型
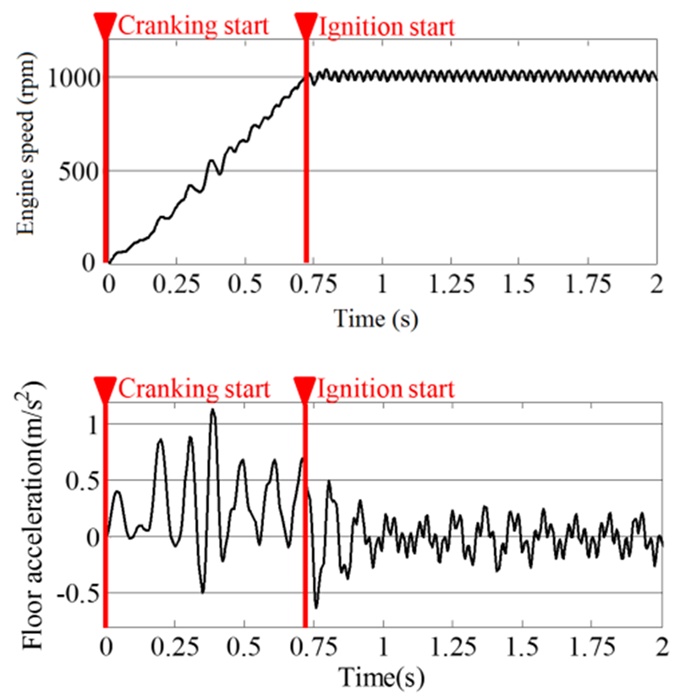
4. 联合仿真分析
发动机起动阶段仿真
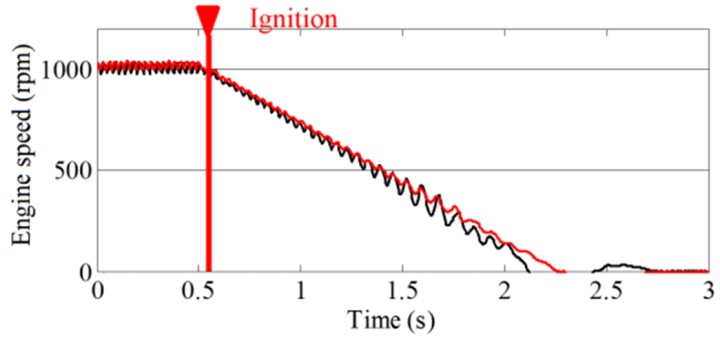
发动机停止阶段仿真
4. 联合仿真分析---激励源控制
发动机不平衡扭矩的描述
对发动机的泵气阻力以及惯性阻力矩进行了详细的计算,将加载在活塞上的泵气阻力转换为发动机的泵气阻力矩,这个周期性变化的扭矩作用在飞轮上,造成整个传动系的振动。
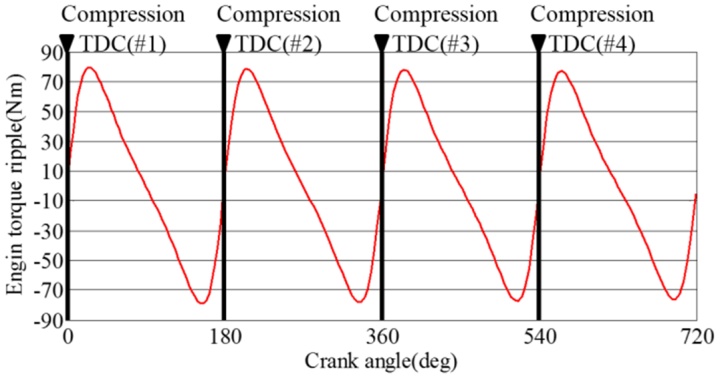
发动机不平衡力矩
发动机不平衡扭矩补偿
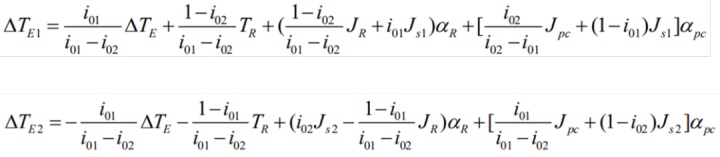
发动机扭矩补偿仿真结果
E1补偿前后对比

E2补偿前后对比
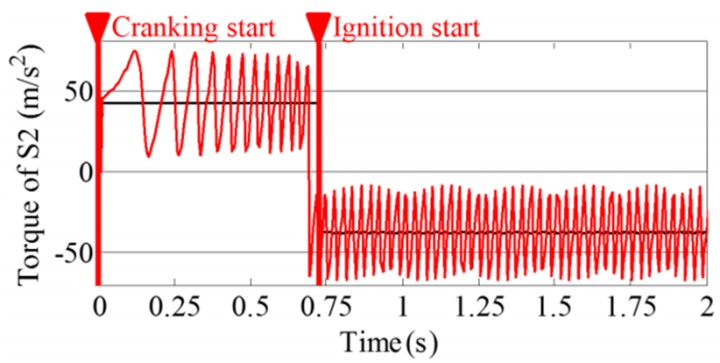
发动机起动阶段仿真
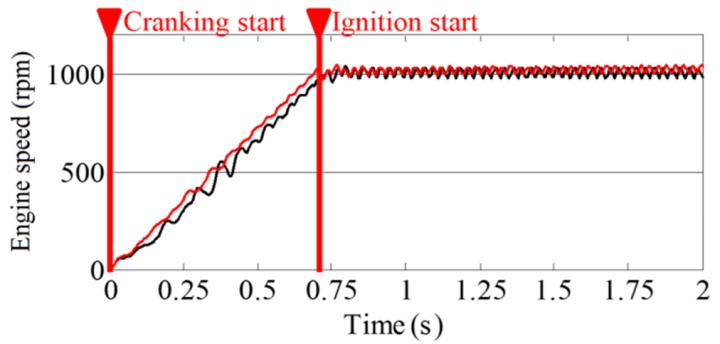

通过电机进行扭矩补偿,抵消了一部分发动机不平衡扭矩,使发动机的拖动过程变得平稳,但仍旧有部分扭矩波动的存在。
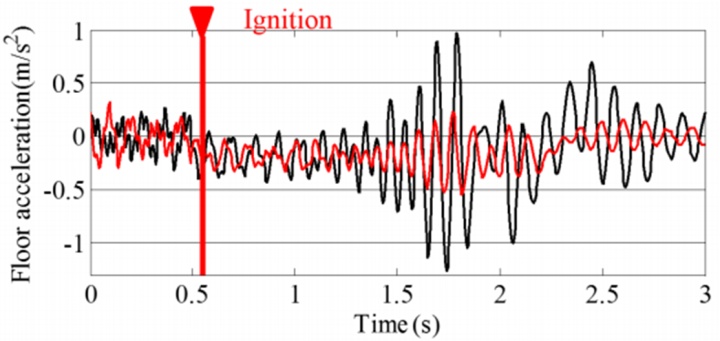
发动机起动阶段仿真对发动机不平衡扭矩进行补偿,成功的降低了整车纵向的抖动,使整车纵向加速度波动幅值降低至0.7m/s2以下,即整车振动与未加控制相比降低了40%左右。
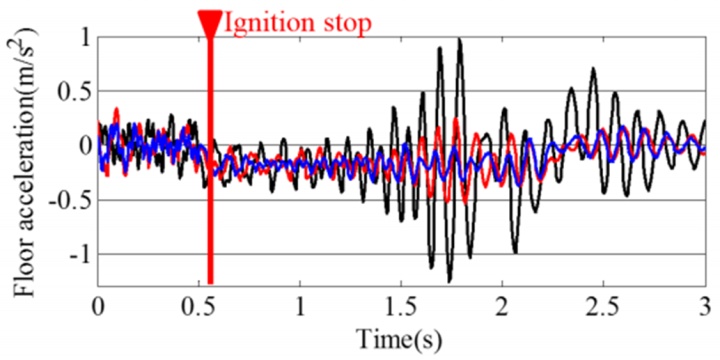
发动机停止阶段仿真
从图中的仿真曲线可以看出,通过大、小电机对发动机不平衡扭矩的补偿,发动机停止过程中的转速波动明显减小,基本上以恒定的斜率下降至0。
从图中仿真曲线可以看出,发动机停止过程中整车的纵向加速度幅值降低至0.5m/s2以下,与未加控制相比降低了60%左右。
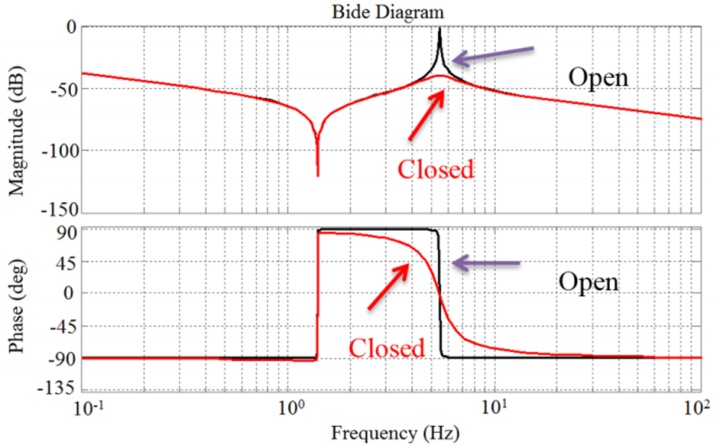
4. 联合仿真分析---传递路径控制
传递路径控制
在控制激振源的基础上,还要进行扭振传递路径的控制优化,才能更好地实现发动机起动过程的扭振控制。
传递函数:

系统闭环的伯德图

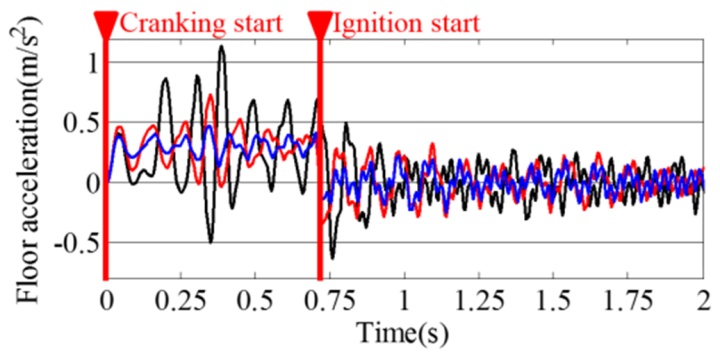
发动机起动阶段闭环仿真
从图中仿真曲线可以看出在闭环系统中,发动机转速更加平稳。
从图中仿真曲线可以看出,整车纵向加速度幅值降低到0.4m/s2以下,振动幅值仅为未加控制的30%左右,对于驾驶人员是可以接受的范围内。
发动机停止阶段闭环仿真
从图中仿真曲线可以看出在闭环系统中,发动机转速降低过程也变得更加平稳。
整车纵向加速度幅值降低到0.3m/s2以下,振动幅值仅为未加控制的20%左右,对于驾驶员而言也是可以接受的范围内。
5. 结论与展望
建立了联合仿真平台,实现了复合行星排式深度混合动力系统驱动模式切换过程动态响应联合仿真分析;从激励源与传递路径出发,抑制了混合动力驱动模式切换下的振动幅值。
本文建立的动力学模型的悬架以及传动系的刚度阻尼都是线性的模型,在实际车辆中,这些变量通常是非线性的。
下一步建立一 个非线性的整车模型,并用于以后的分析中,则更接近实际车辆模型;
基于该混合动力汽车,从能量管理控制策略、结构优化与动力参数匹配等多个角度进行分析,以提高该混合动力汽车的动力性与经济性。



 广告
广告 



最新资讯
-
国际标准《商用车辆 牵引车与挂车之间的电
2026-03-13 13:51
-
比亚迪弗迪电池CEO何龙:二代刀片电池在不
2026-03-13 13:50
-
思看科技AM-CELL C 自动化光学3D检测系统上
2026-03-13 10:40
-
《汽车隔声性能测量与评价方法 第2部分:消
2026-03-12 13:53
-
《汽车隔声性能测量与评价方法 第1部分:混
2026-03-12 13:53
