




 广告
广告





















































智能汽车功能解析——车辆盲区监测系统
2021-10-18 17:29:10· 来源:北京市高级别自动驾驶示范区 作者:程增木

智能驾驶辅助系统已经广泛应用于量产汽车中,当我们在开车过程中,一些智能驾驶辅助系统可以有效地帮助我们提高驾驶的便利性和舒适性,例如当前应用较为广泛的自
智能驾驶辅助系统已经广泛应用于量产汽车中,当我们在开车过程中,一些智能驾驶辅助系统可以有效地帮助我们提高驾驶的便利性和舒适性,例如当前应用较为广泛的自适应巡航控制系统,驾驶员开启该系统后车辆,可以以确定速度或确定车距进行巡航行驶,这大大提升了驾驶的便利性。最近,搭载NOP领航辅助功能的蔚来ES8出事了。NOP领航辅助功能也是智能驾驶辅助系统中的一种功能,辅助驾驶系统可以帮助驾驶员进行判断,但是不能替代驾驶员。
1、车辆盲区监测系统的定义
车辆在变道行驶时,由于转弯时后视镜存在视野盲区,驾驶员仅凭后视镜的信息是无法完全判断后方车辆的信息。恶劣天气(雨雪、大雾、冰雹等)增大了驾驶员的判断难度,增加了汽车在变道行驶时碰撞或刮擦的风险。将车辆盲区监测系统(Blind-Spot Collision-Avoidance Assist,BCA)安装在左右后视镜或其它传感器的位置来感知后方道路信息,如果后方有车辆、行人、自行车及其它移动物体靠近时,盲区监测系统就会通过声光报警器提醒驾驶员或在紧急情况下进行制动。车辆盲区监测系统的系统示意图如图1所示:
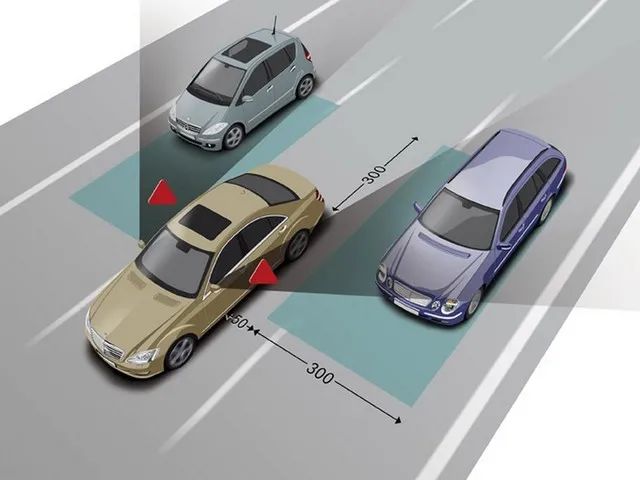
图1 车辆盲区监测系统的示意图
2、车辆盲区监测系统的组成
车辆盲区监测系统一般由感知单元、电子控制单元和执行单元等组成,如图2所示:
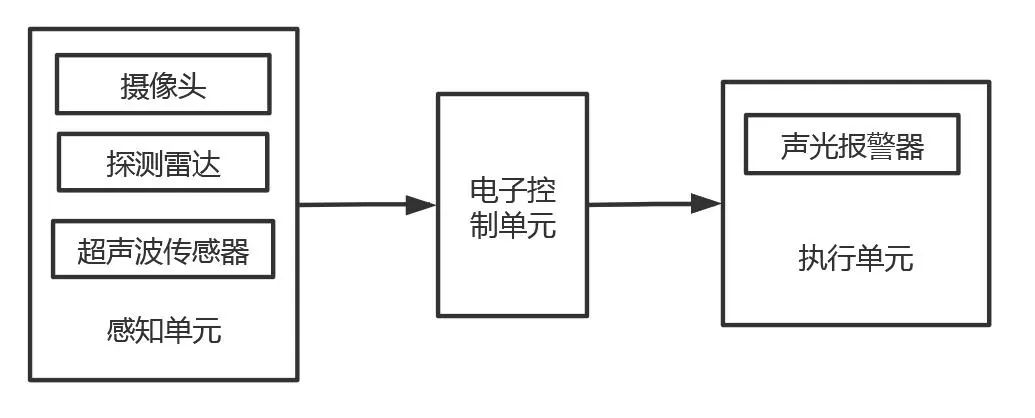
图2 车辆盲区监测系统的组成示意图
感知单元
感知单元目前使用的传感器主要是摄像头、探测雷达、超声波传感器。感知单元的主要作用是检测汽车后方视野盲区中是否有行人、自行车以及其它车辆,将感知的信息传送给电子控制单元,便于后期进行信息判断及处理。
电子控制单元
电子控制单元的主要作用是将感知单元的信息进行处理及判断,将信号输出给执行单元。
执行单元
执行单元主要由声光报警器组成。执行单元的主要作用是执行电子控制单元的指令。声光报警器主要包括显示装置和报警装置。如果检测到后方存在危险,那么显示装置就会在后视镜上显示碰撞危险图标并闪烁提示,报警装置会发出报警声来提示驾驶员。
3、车辆盲区监测系统的原理
车辆盲区监测系统的是通过安装车辆后视镜或其它位置的传感器(主要为摄像头、毫米波雷达等)来检测后方的车辆、自行车等,电子控制单元对感知单元的数据进行计算及判断。如果检测到盲区中有车辆或者自行车,声光报警器会发出警报,后视镜上显示碰撞危险图标并闪烁提示,部分车型还可以进行紧急制动。
4、车辆盲区监测系统的应用
本文介绍的车辆盲区监测系统是以现代起亚汽车公司凯酷车型的车辆盲区监测系统为例。(系统的示意图如图3所示)

图3车辆盲区监测系统示意图
车辆盲区监测系统主要由安装在左右两个后视镜上面的毫米波雷达组成,该毫米波雷达使用24GHz的毫米波雷达,可探测最远距离大约为50m,探测的角度约为30°,可识别高度为50cm以上的物体。毫米波雷达可以感知后方来到的车辆、自行车等移动物体,电子控制单元可以计算移动物体和当前车辆的相对速度,如果相对速度大于系统设定的阈值,则此时车辆盲区监测系统启动,车辆外后视镜指示灯常亮。若此时驾驶员试图变更车道到危险车道,此时车辆外后视镜指示灯会闪烁,警报蜂鸣器发出报警声音提示驾驶员有碰撞危险。

图4 盲区监测系统功能实拍图
如果驾驶员仍然进行变道,凯酷会启动紧急制动系统,及时对车辆进行制动并调整车辆当前的运动方向,其功能示意图如图5和6所示:
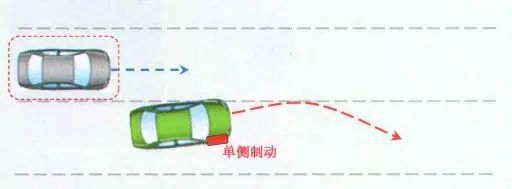
图5 后方来车单侧制动示意图
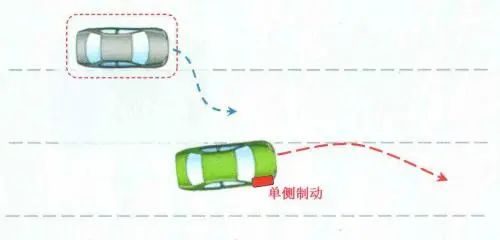
图6 侧方来车单侧制动示意图
除此之外,两侧的后视镜中还搭载了两个摄像头,这两个摄像头是盲区显示系统(Blind-Spot View Monitor,BVM)的感知传感器。该摄像头使用全方位侧摄像头,可显示后方约100m的图像,图像显示效果较为清晰。其系统摄像头图如图7所示:
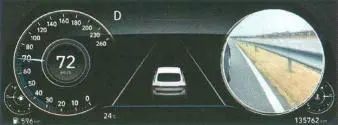
图7 盲区显示系统摄像头图
根据驾驶者开启转向灯的方向,将该方向后侧方影像显示在凯酷的12.3英寸仪表盘上,提高整车的驾驶便利性。仪表显示图如图8和图9所示:
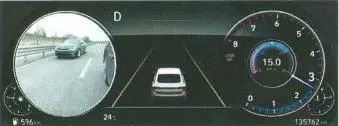
图8 左侧盲区仪表显示图
图9 右侧盲区仪表显示图
北美国家汽车的后视镜一般采用平镜,视野角为15°,中国汽车的后视镜采用曲镜,视野角约为25°。搭载了盲区显示系统的凯酷的视场角可达到50°,大幅改善了原有后视镜的盲区部分,可以消除驾驶者对盲区的不安感,是一项较为实用的配置。其视野视角图如图10所示:

图10 盲区显示系统视野角和视场角示意图
5、总结与展望
车辆盲区监测系统可以监测后方来车情况并且对驾驶员进行警告,这个系统可以有效辅助驾驶员进行判断及操控车辆,但是该系统当前还不够“智能”,还需要驾驶员去进行判断以及操控。后续该系统可以升级为TJP(交通拥堵辅助自动驾驶系统),该系统可以通过安装在车辆后视镜处的摄像头或者车辆前方翼子板对侧方即将驶入的车辆、自行车等移动物体进行识别。如果即将驶入的对象速度较快,车辆可以进行紧急制动或者提前开启侧气帘保护乘客或驾驶员。如果即将驶入的对象速度较慢,车辆可以减速或缓慢制动,等待该对象驶入车辆前方后再进行车辆操控。

图11 安装在后视镜处的摄像头

图12 安装在翼子板处的摄像头
该系统当前遇到的问题为:受限于当前物体识别技术及摄像头探测的角度及距离,当侧方驶入对象速度过快时,无法及时避让驶入对象,即发生事故的概率较高,如果出现误判提前引爆侧气帘,可能会对驾驶员或乘客造成惊吓甚至损伤,这是当前该技术的一个难点。但是我相信随着车载摄像头技术的发展,随着高速动态物体识别技术的发展,该辅助驾驶系统可以有效保护驾驶员和行人。



 广告
广告 编辑推荐




最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
