




 广告
广告





















































电动物流车匹配设计与效率优化控制策略研究
2021-10-01 09:06:06· 来源:汽车技术研究所

由于传统内燃机汽车的能耗和排放难以取得质的突破,使得汽车新能源技术的发展成为人们关注的焦点[1]。与其他类型的新能源汽车相比,纯电动汽车仅使用电能作为驱
由于传统内燃机汽车的能耗和排放难以取得质的突破,使得汽车新能源技术的发展成为人们关注的焦点[1]。与其他类型的新能源汽车相比,纯电动汽车仅使用电能作为驱动能 源,零排放、零油耗,是未来汽车发展的重要方向[2-4]。然而,纯电动汽车除了具有零污染、零油耗的优点外,还面临许多技术难题,如续驶里程不足、充电基础设施不完善以及充电时间过长等。较短的续驶里程意味着纯电动汽车消费者具有较高程度的“里程焦虑”[5-7]。而充电基础设施的缺乏无疑会进一步加剧消费者对使用纯电动汽车的担忧。若要解决充电基础设施不完善和充电时间过长等难题,所涉及 的难度、规模都比较大,不易实现。因此,若要提高纯电动汽车的市场占有率,需从改善其续驶里程入手。
本文针对纯电动汽车,制定效率优化控制策略,有效提升整车经济性。本文通过多元线性回归得到动力电池效率,充放电功率和SOC 三者的关系,将动力电池效率图根据 SOC 区间分为多个部分,使效率曲线的设计方程更好地适应效率图,从而制 定考虑效率优化的控制策略。最终对本文提出的控制策略进行仿真和实车验证,该策略进一步提高了整车续驶里程。
1 电动物流车动力系统参数匹配
本文研究的纯电动物流车的动力系统结构如图 1 所示, 整车基本参数和性能指标如表 1、2 所示。
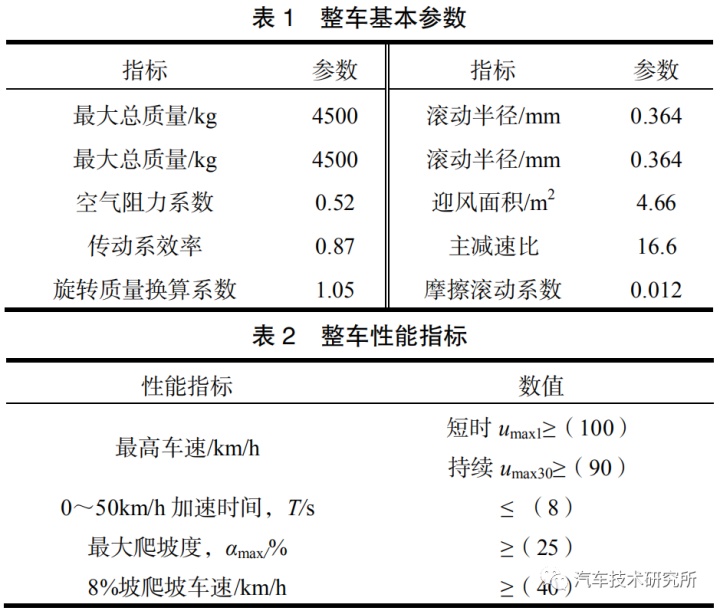
1.1 驱动电机参数
对于纯电动汽车,电机功率参数的选择要根据纯电动行驶时的最高车速、加速性能和爬坡性能要求确定。
1.1.1 最高车速
对于整车最高车速,包括持续 30 分钟最高车速和持续 1 分钟最高车速,分别对应整车性能指标中的持续最高车速和短时最高车速。驱动电机的最大功率 Pr1 需满足最高车速时的功率需求,如式所示:

式中,Pu max 为短时或持续最高车速对应的最大功率;m 为整车质量;g 为重力加速度;f 为滚动阻力系数;Cd为空气阻力系数;A 为迎风面积;ηt 为传动效率;umax 为短时或持续最高车速。
1.1.2 爬坡性能
对于爬坡性能,分别计算在爬坡度为 20%、25%和 30%, 不同爬坡稳定车速下的纯电动汽车的需求功率 Pr2,如式所示:

式中,uα为爬坡车速;α 为爬坡角度。1.1.3 加速性能对于加速性能所需功率,设定在水平路面上从原地起步电动汽车加速到 50 km/h 不超过 8 s。在加速末端时刻输出的 最大功率 Pr3为:

式中,δ 为旋转质量换算系数;vm 为加速时最高车速;dt 为时间步长;tm为加速时间;x 为拟合系数。1.1.4 电机转速驱动电机最高转速:

式中,r 为轮胎滚动半径;i0为主减速器传动比。
1.1.5 电机峰值扭矩
驱动电机峰值扭矩:
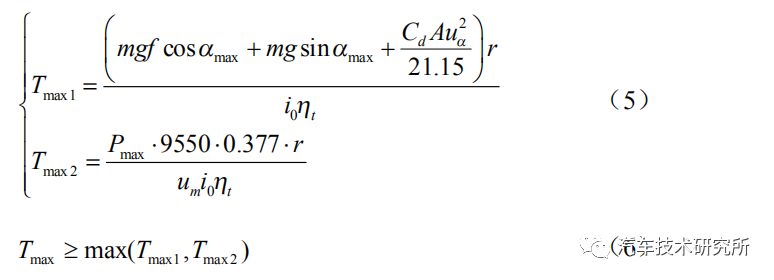
式中:Tmax1 为根据最大爬坡度 αmax 确定驱动电机的最大扭矩;Tmax2 为根据电机驱动峰值功率 Pmax 确定的驱动电机最 大的扭矩。1.1.6 电机额定扭矩驱动电机额定扭矩 Te:

式中,Pe 为电机额定功率;ne 为电机额定转速。纯电动汽车的电机峰值功率必须不小于三大动力性指标所确定的功率,即:

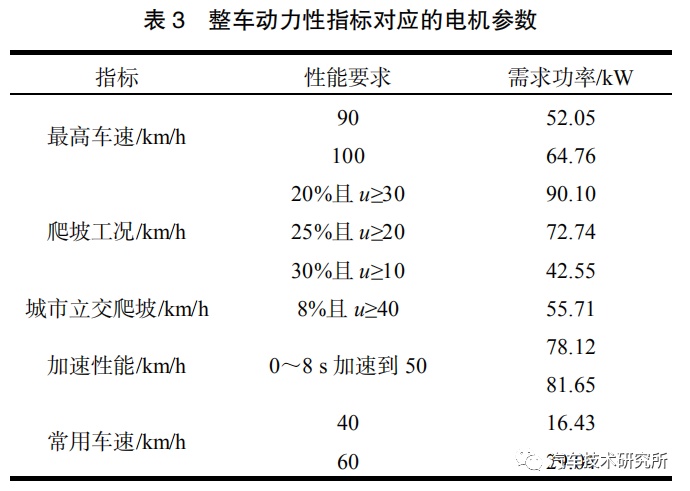
根据以上设计过程,电机的基本需求参数,如表 3 所示:
最终,所选电机的效率和功率分别如下图所示。

1.2 动力电池参数
1.2.1 电池组功率参数
电池组在纯电动时,为电机提供放电功率,因此电池组 的最大放电功率 Pr_max 必须大于电动机的峰值功率,即:
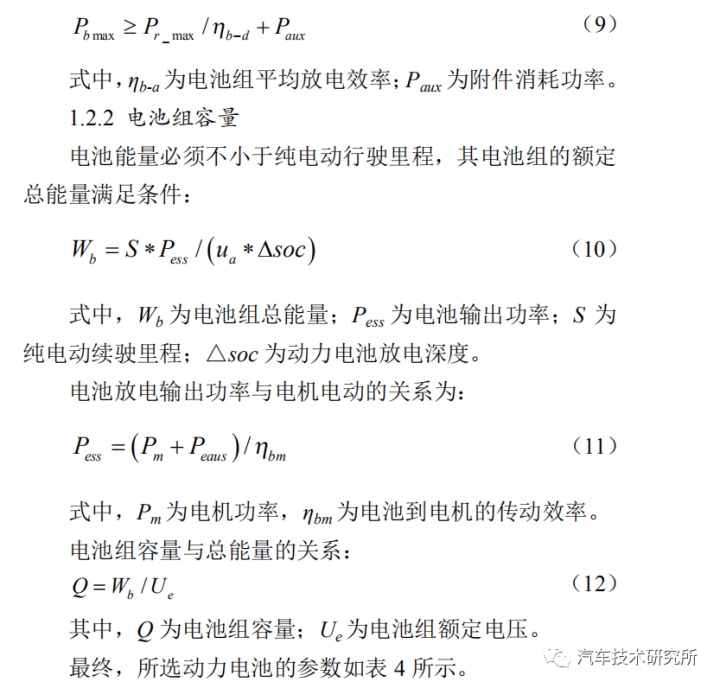

考虑到环境温度对电池性能参数的影响,本文分别取温 度为 10 ℃、25 ℃和 45 ℃下,分析单体电池开端电压、充放电内阻和电池 SOC 的关系,如图 4 所示,为不同温度下,电池性能参数随 SOC 的变化。
2 构建效率优化控制策略
效率优化的关键是对动力系统关键参数的优化,使 EV工作在最佳的工作区间,有效提升整车续驶里程。为了提高纯电动物流车的经济性,并解决整车在运行过程中动力元件效率对系统能量利用率影响的问题,在合理的参数匹配基础上,制定了基于多元线性回归的效率优化控制策略。
为了计算效率图的最大优点,通过多元线性回归得到动力电池效率,电流和 SOC 三者的关系并通过 Matlab 创建并 计算了效率曲面曲线,如图 5 所示。由图可知,大部分数据 点均落在拟合的效率曲面上,然而,某些高效率点(如红色圈内)不能通过曲线拟合得到,尤其在低 SOC 区间时,导致优化过程难以达到最佳的效率点。

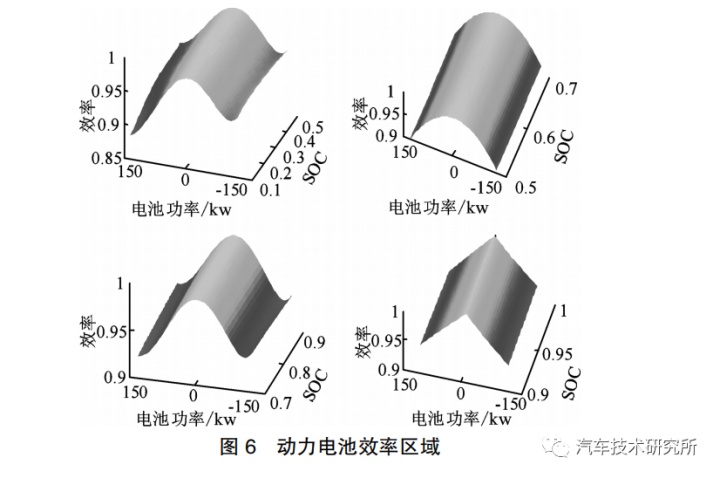
为了解决上述问题,从而达到更好的曲线拟合效果,本 文将动力电池效率图,根据 SOC 区间分为多个部分,使曲线的设计方程更好地适应效率图。利用多元线性回归方程将动力电池效率按照不同的 SOC 区间(SOC<0.5,0.5<=SOC<0.7, 0.7<=SOC<0.9,SOC>=0.9)划分为四部分,最终的动力电池效率区域如图 6 所示。
3 实验与结果分析
为验证本文制定的效率优化控制策略的有效性,开展对比实验验证,与基于 map 的方法进行经济性能比较。
3.1 效率优化控制策略性能实验
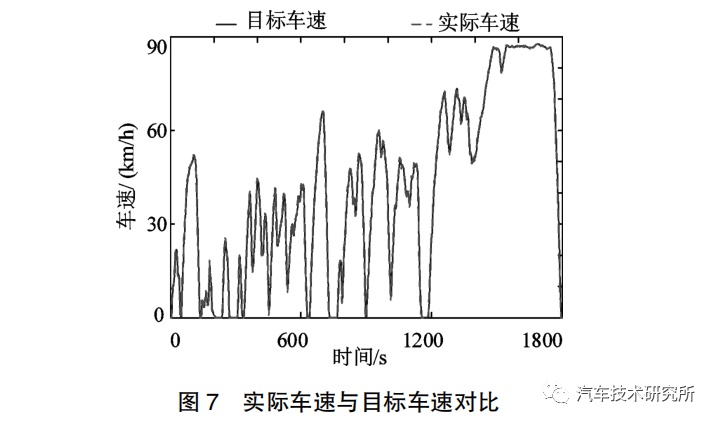
为了验证本文提出的基于多元线性回归的效率优化控制策略能够进一步提高整车经济性,将与基于 map 的方法进行对比。为了清楚表示,这里仅列出在一个 CWTVC 循环工况下的结果,如图 8 所示,为实际车速与目标车速的对比图,在工况运行过程中,实际车速可以很好地跟随目标车速。
如图 8 所示,图(a)为一个 CWTVC 循环工况下电机功率对比图,电机功率大致分布在-46.5 kw 至 58 kw 之间。图(b)为一个 CWTVC 循环工况下电池放电信号示意图,放电信号在 0 和 1 之间不断切换,其中 1 代表电池此刻在放电。为了清楚反映 SOC 的变化趋势,图(c)为多个重复 CWTVC 循环工况下两种策略下的 SOC 对比图,结果表明,基于效率优化控制策略最后 SOC 为 0.131 7,电量消耗 3.372 5 kwh;基于 map 的策略最后的 SOC 为 0.100,电量消耗 3.372 6 kwh。基于效率优化控制策略相比基于 map 的方法,在电量消耗量接 近的情况下,采用效率优化控制策略剩余 SOC 更多,经济性更优。

如图 9 所示,为两种策略下实际效率对比图,为了清楚表示,将 SOC 区间在 0.35 至 0.55 间的实际效率点放大,如 图 9(b),可以明显看到,这两种策略均能工作在高效率区间,其中,基于 map 的方法,实际充放电效率区间在[0.96,1],基于效率优化控制策略的实际充放电效率在[0.97,1],效率稍优 于基于 map 的方法,使动力电池更多地工作在高效率区间,提高整车经济性。
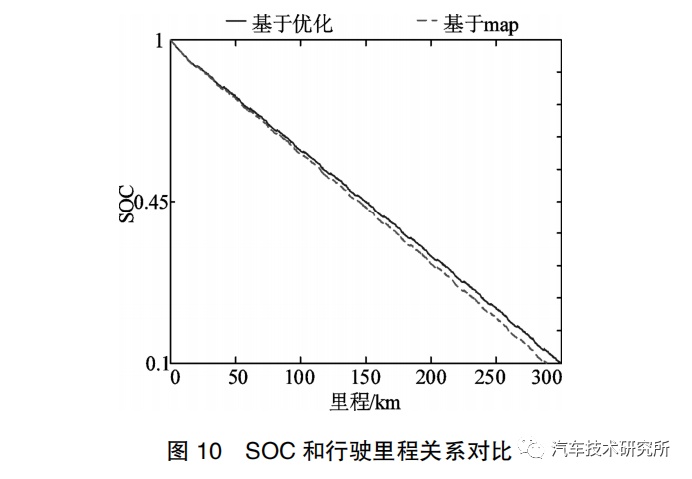
如图 10 为两种策略下,电量耗尽时行驶里程对比图,基于 map 的方法最终行驶里程为 288 km,基于效率优化控制策略的最终行驶里程为 300 km,相比基于 map 的方法,续驶里程更长,每月可多跑 360 km。
3.2 实车验证
在某公司转毂试验室开展该电动车 CWTVC 工况下的续驶里程测试。主要试验设备:德国 MAHA 公司的底盘测功 机,型号 72H-2MOT。图 11 为实测 CWTVC 工况下续驶里程的过程数据,电流为正值,代表能量输出放电过程,电流 为负值时,代表能量回收过程。
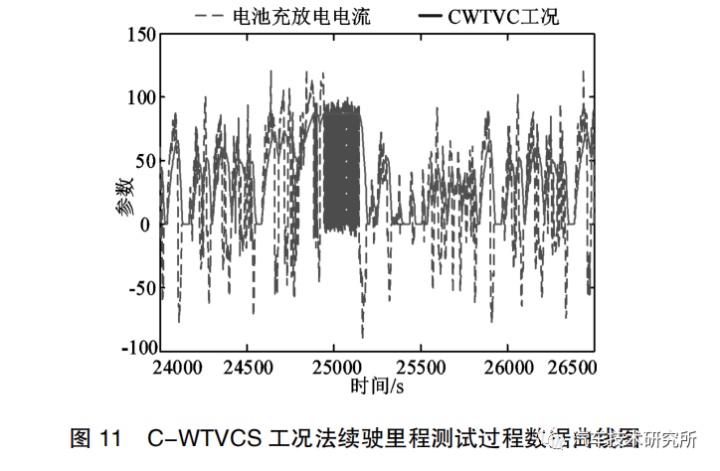
试验样车实施了效率优化控制策略后,实测 CWTVC 工 况下续驶里程为 297.2 km。
4 结论
(1)以提高纯电动汽车的经济性为研究目标,在构建纯电动汽车模型的基础上,制定考虑效率的控制策略。
(2)通过仿真实验表明,基于效率优化控制策略,相比基于 map 的方法,在工况运行过程中,动力电池工作在更高的效率区间,在相同 SOC 区间下,续驶里程更长,每月可多 跑 360 km,在经济上优于基于 map 的方法,为后续项目开发 提供了参考。
(3)今后将进一步研究再生制动能量回收对续驶里程 的影响及提升方案。
- 下一篇:大陆电驱动系统EMR4详细剖析
- 上一篇:汽车悬架性能测试技术的研究



 广告
广告 



最新资讯
-
展会预告 | TCT亚洲展倒计时!思看科技五大
2026-03-10 20:50
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
