




 广告
广告





















































功率分流式混合动力汽车分析
2021-03-14 18:23:49· 来源:旺材动力总成

来源:上海交通大学汽车工程研究院底盘所、联合汽车电子有限公司作者:刘洋、肖扬、喻凡、罗哲混合动力汽车能量管理策略按照控制方式的不同分为基于规则的管理策
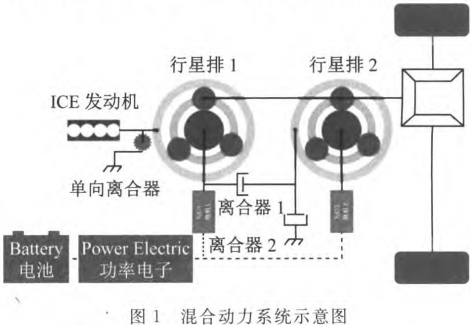
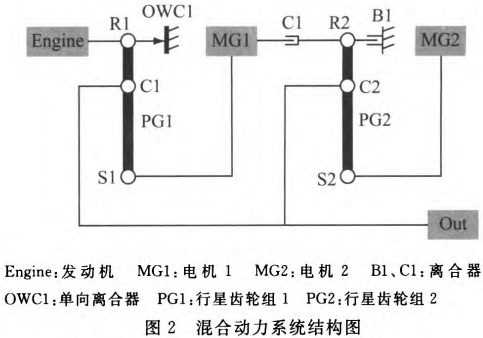
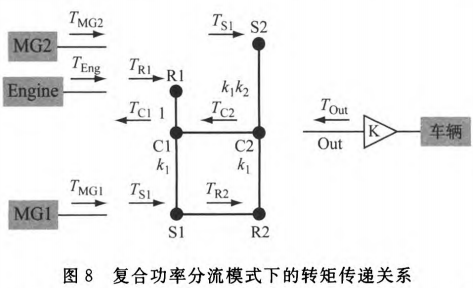
本文针对一种特定的双行星排式功率分流机构,对其结构及工作模式进行了分析,并建立了不同工作模式下的运动学方程。

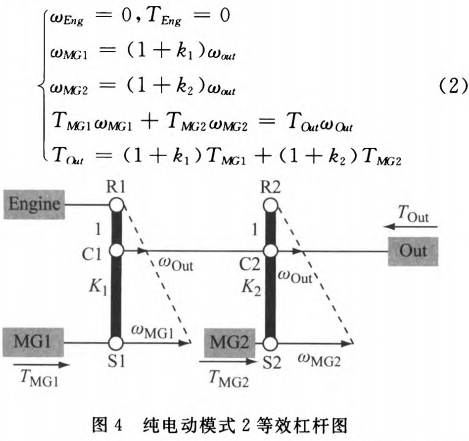
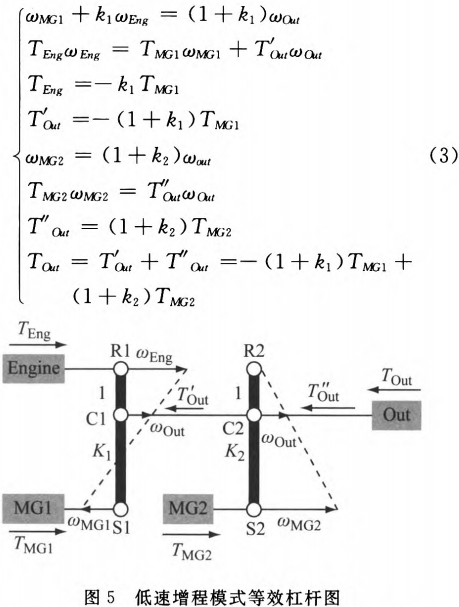
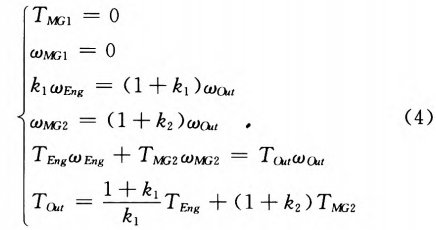
如图5所示,将MG2等效到C2上则可以发现,该模式实际为输入分流模式。各动力源的转速转矩关系如下:




- 下一篇:软件如何主导汽车行业?
- 上一篇:美国创企推出面向L4以上的多传感器平台NPS500



 广告
广告 



最新资讯
-
展会预告 | TCT亚洲展倒计时!思看科技五大
2026-03-10 20:50
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
