




 广告
广告





















































全球激光雷达产业链!
2021-03-04 00:42:55· 来源:ittbank

一、激光雷达是一种用于精确获得三维位置信息的传感器 激光雷达,即光学雷达、光达(LiDAR),是一种用于精确获得三维位置信息的传感器,其在机器中的作用相当于人类的眼睛,能够确定物体的位置、大小、外部形貌甚至材质。 它通过测量激光信号的时间差、相位




一、激光雷达是一种用于精确获得三维位置信息的传感器
激光雷达,即光学雷达、光达(LiDAR),是一种用于精确获得三维位置信息的传感器,其在机器中的作用相当于人类的眼睛,能够确定物体的位置、大小、外部形貌甚至材质。
它通过测量激光信号的时间差、相位差确定距离,通过水平旋转扫描或相控扫描测角度,并根据这两个数据建立二维的极坐标系;再通过获取不同俯仰角度的信号获得第三维的高度信息。高频激光可在一秒内获取大量(106-107 数量级)的位置点信息(称为点云),并根据这些信息进行三维建模。除了获得位置信息外,它还可通过激光信号的反射率初步区分不同材质。
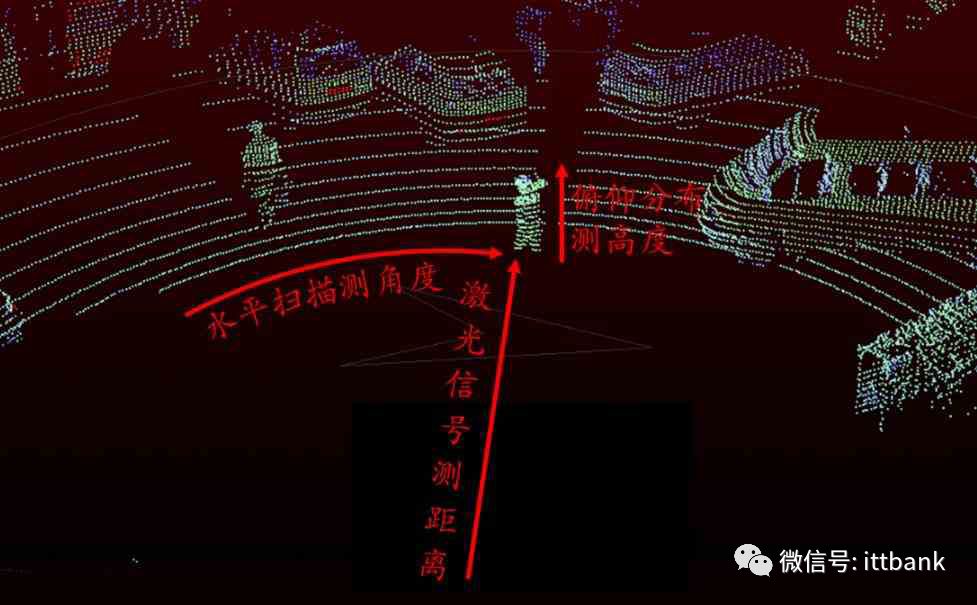
激光雷达测量技术示意图
二、激光雷达工作原理
激光雷达(LiDAR)能释放多束激光,接收物体反射信号,计算目标与自身的距离。应用较多的是利用反射信号的折返时间计算距离(Time of Flight),也有连续波调频(CWFM)方法。与雷达和摄像头相比,激光雷达可以通过多束激光高频发射获取的反射数据形成周边物体的高清3D的“点云”图像。
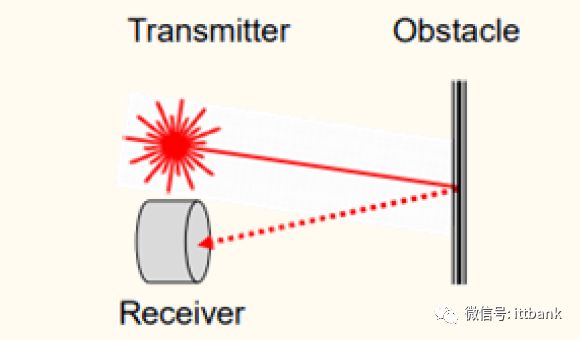
激光雷达原理
激光雷达主要优点是能对周边物体进行建模形成高清3D图像,以便计算机进行快速识别和决策。但在不良天气条件下精度将会下降,以及无法辨别物体属性。
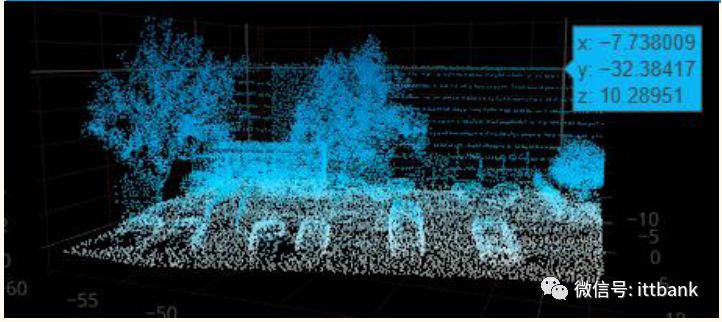
激光雷达效果
三、激光雷达优缺点
激光雷达优点:
-
1.形成周边物体高清3D图像;
-
2.数据量较小,便于快速决策;
-
3.探测距离较长,最远达300m。
激光雷达缺点:
-
1.雨雪、雾霾天气精度下降;
-
2.激光雷达难以分辨交通标志的含义和红绿灯颜色;
-
3.激光雷达接收的是光信号,容易受太阳光、其他车辆的激光雷达等关线影响;
-
4.目前激光雷达成本较高。
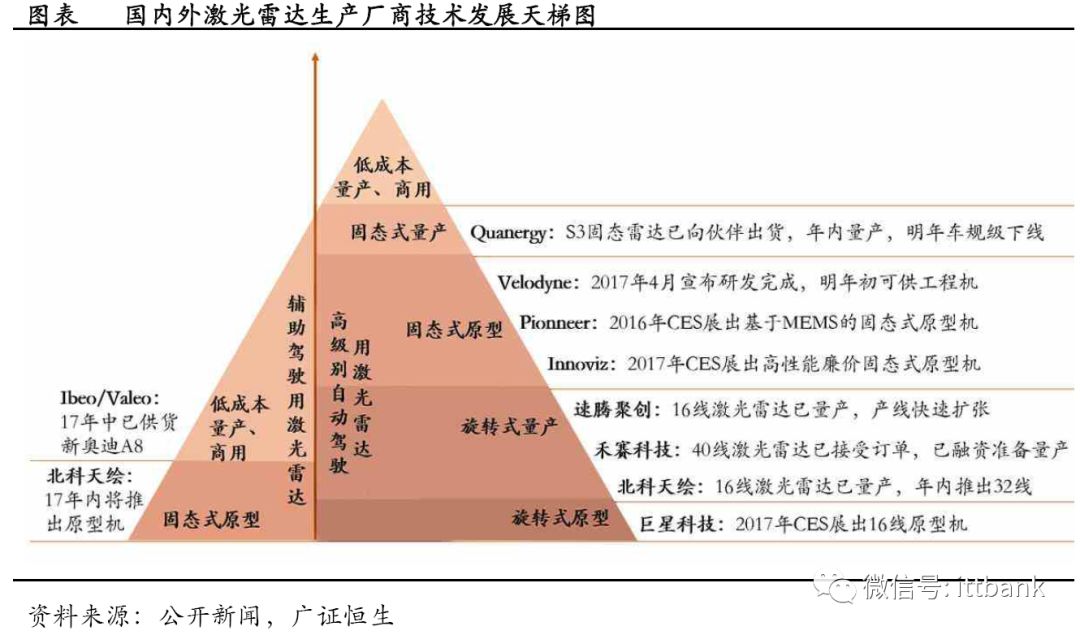
四、固态激光雷达分类及技术路线
我们看到自动驾驶测试车车顶上较复杂的圆柱形装置,即为机械式激光雷达。虽然目前测试车辆大多为机械式,但是它们调试、装配工艺复杂,生产周期长,成本居高不下,并且机械部件寿命不长(约1000-3000小时),难以满足苛刻的车规级要求(至少1万小时以上),因此激光雷达量产商都在着手开发性能更好、体积更小、集成化程度更高、并且成本更低的激光雷达,由混合固态过渡到纯固态激光雷达是必然的技术发展路线。

机械式激光雷达
混合固态激光雷达在产品外形上不存在机械旋转的部件,但内部实际存在小巧的机械旋转扫描系统,作为到固态激光雷达的过渡阶段,近几年量产的产品都属于混合固态激光雷达。
固态激光雷达由于不存在旋转的机械结构,所有的激光探测水平和垂直视角都是通过电子方式实现的,并且由于装配调试可以实现自动化,能够量产大幅降低成本,也提高了设备的耐用性,固态激光雷达是必然的技术发展路线。不过固态激光雷达的技术路线尚未定型,主要分为MEMS、OPA和3DFlash三类。
1、MEMS激光雷达
原理:MEMS激光雷达通过在硅基芯片上集成的MEMS微振镜来代替传统的机械式旋转装置,由微振镜反射激光形成较广的扫描角度和较大的扫描范围。

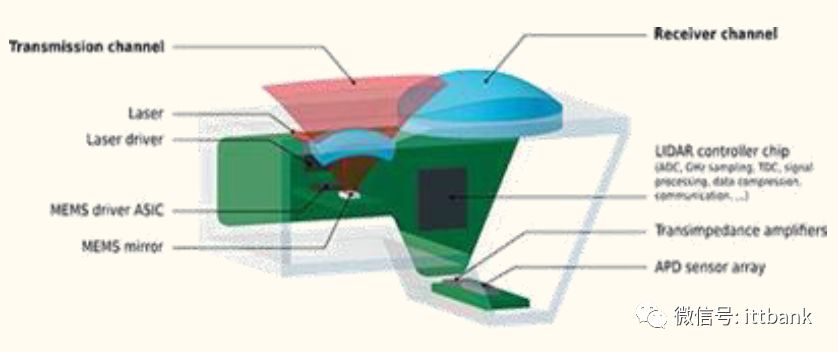
MEMS激光雷达原理
优点:MEMS微振镜相对成熟,可以以较低的成本和较高的准确度实现固态激光扫描(只有微小的微振镜振动),并且可以针对需要重点识别的物体进行重点扫描,落地快;
缺点:并没有解决接收端的问题,光路较复杂,仍然存在微振镜的振动,这个结构会影响整个激光雷达部件的寿命,并且激光扫描受微振镜面积限制,与其他技术路线在扫描范围上有一定差距。
典型企业和产品:Velodyne的Velarray系列,LeddarTech,innoluce,Innoviz,Fujitsu, Toyota,Draper。
2、光学相控阵OPA-Optical Phased Array激光雷达
原理:光学相控阵OPA固态激光雷达原理是多处振动产生的波相互叠加,有的方向互相增强,有的方向抵消,采用多个光源组成阵列,通过控制各光源发射的时间差,可以合成角度灵活、精密可控的主光束。
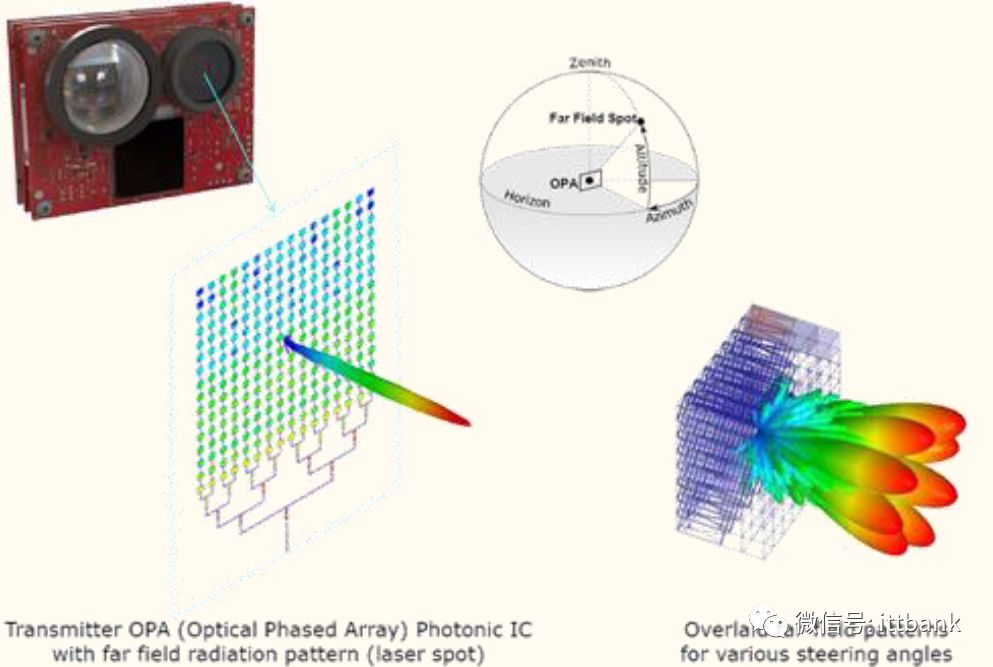
OPA激光雷达原理
优点:没有任何机械部件,结构相对简单,精度高,体积小,成本低。
缺点:在主光束以外会形成“旁瓣”,到时能量分散,并且阵列单元尺寸小于500nm,对加工精度要求高,扫描角度有限,接收端方案薄弱,接收面大、信噪比较差。
典型企业和产品:Quanergy的S3,Blackmore, Strobe。
3、3D Flash激光雷达
原理:3D Flash激光雷达以一次脉冲向全视野发射,利用飞行时间成像仪接收反射信号并成像,发射的激光波长是关键因素。如果使用905nm,虽然成本较低,但功率受限,因此探测距离不够远。若使用1550nm,在接收上需要更高成本的探测器,目前尚没有商用条件。也有一批厂商采用Flash技术路线,对成本和人眼保护的平衡形成了一定的解决方案。
优点:全固态,没有移动部件;发射端方案较成熟,成本较低;容易通过车规级检验。
缺点:采用单脉冲测量,单脉冲需要较高的能量,峰值功率能达到上百千瓦至兆瓦级别,需要搭载固体激光器,而固体激光器成本很高,且闪光能量可能伤害人眼安全,受严格限制。
典型企业和产品:LeddarTech的LCA3,Tetravue,Princeton Lightwave,Trilumina (VCSEL阵列),Toyota丰田,ESPROS的EPC660/635系列面阵,Advanced Scientific Concepts(ASC),TI的OPT8241等;
五、激光雷达是产业链的核心,下游应用于测绘和导航
激光雷达由发射器、接收器(感光元件和长焦镜头)、惯导系统构成。实际上,产业链的上游制造元件成本不高,不是构成成本的主要因素;且因为激光雷达是下游测绘、导航等应用的核心部件,目前产能稀缺导致供不应求,呈现卖方市场,对下游有很强的定价权,因此该产业链主要附加值在于激光雷达部分。
作为一种能够获取物体位置、形状的信息的传感器,激光雷达天生地适用于地形地图测绘。常用于室内建模、道路及设施数据采集、矿山采空区测量,或搭载于飞行器上进行大范围的电力巡线、林业普查、水利勘测等等,应用广泛。目前该领域硬件技术较为成熟,已有室内、搭载于汽车、船舶、飞行器的解决方案,体积较大,精度较高,探测范围较远。该领域软件方面是大规模发展的瓶颈,尚未有成熟的处理大量点云数据并建模的方案,目前市面上都是以非标特制软件为主,通用平台式尚有待发展。
近年来,激光雷达被用于导航领域,如机器人、无人机的避障,和智能车的自动驾驶(包括辅助驾驶等不同级别)。由于应用场景的不同,在导航领域要求激光雷达能够快速扫描、动态处理数据并实时反馈,在精度方面相对要求较低,只需分辨清楚障碍物、行人、汽车等,垂直角分辨率一般在1°左右。目前该领域高端硬件技术正在发展中,产品应用于各类智能车的原型车上,低端技术如应用于扫地机器人等低分辨慢响应已经实现量产。软件方面,由于目前各类无人车的研发公司均为互联网巨头或汽车巨头,如谷歌、百度、大众、宝马等,各公司均有自研算法,壁垒较高,也有少量创业公司面向市场提供了包含算法逻辑的解决方案给客户选择,但是非常基础,也需要客户进行进一步开发。
目前的低级别自动驾驶,即辅助驾驶和部分自动驾驶领域中,主要的定位测距技术仍然是毫米波雷达和视觉传感器。激光雷达与之相比成本过高,未能被车企接受。超声波雷达目前单价约为150 美元,激光雷达经过近10 年来雨后春笋般的发展,价格已从Velodyne 独占时期的逾10 万美元(机械式)骤降至Quanergy 等创业公司声称的200-300 美元(固态式)。



 广告
广告 


最新资讯
-
整车性能测试体系:汽车试验工程的基本框架
2026-03-10 12:54
-
联合国法规R76对轻便摩托车前照灯远近光性
2026-03-10 12:15
-
联合国法规R75对摩托车与轻便摩托车气压轮
2026-03-10 12:14
-
联合国法规R74对L1类车辆灯光与光信号装置
2026-03-10 12:14
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
