




 广告
广告





















































汽车碰撞测试高速成像基本原理
2020-12-08 11:49:13· 来源:PHANTOM 高速摄像机

随着汽车行业对车辆安全的要求不断演进,愈发有必要对碰撞测试进行极高精度的分析。这就需要应用最新的高速成像技术。
随着汽车行业对车辆安全的要求不断演进,愈发有必要对碰撞测试进行极高精度的分析。这就需要应用最新的高速成像技术。汽车工程师借助慢速碰撞过程录像,能够观察、分析安全气囊、安全带和其他部件的微妙运动细节。这一过程帮助他们做出关键的设计决策,也让车辆更安全。
碰撞测试有独特要求,主要是因为测试环境固定,而各种大小不一的物体在这一固定空间内移动,需从多个视角捕捉这些物体的画面。技术人员需要非常注意光线、视场、景深和镜头选择。在本文中,我们将探讨高速摄像经验,以帮助高速摄像机操作员优化车载和地面碰撞测试的高速图像。
我们还将介绍、讨论目前市场上的部分高速摄像机。这些摄像机在汽车碰撞测试方面表现优异,可帮助工程师提高车辆安全性并优化部件设计。
碰撞测试摄像目标
汽车碰撞测试通常有以下两个目标。第一是确保车辆符合行业安全标准,包括美国公路安全保险协会 (IIHS)、美国国家公路交通安全管理局 (NHTSA)、欧洲新车评估计划 (NCAP) 等机构的标准。每个机构都概述了摄像要求,包括高速摄像机在测试车辆内和车辆周围的位置。
例如,IIHS 的“小偏置正面耐撞性评估”(Small Overlap Frontal Crashworthiness evaluation),适用于驾驶员和乘客侧的偏置碰撞测试。根据此协议,模拟车辆前角与物体碰撞时发生的情况,车内的高速摄像机必须满足以下焦点和焦距:
- 驾驶员侧视图=10 毫米- 驾驶员肩膀上方=16 毫米
- 驾驶员后视图=16 毫米
- 弦线电位计和仪器视图=10 毫米
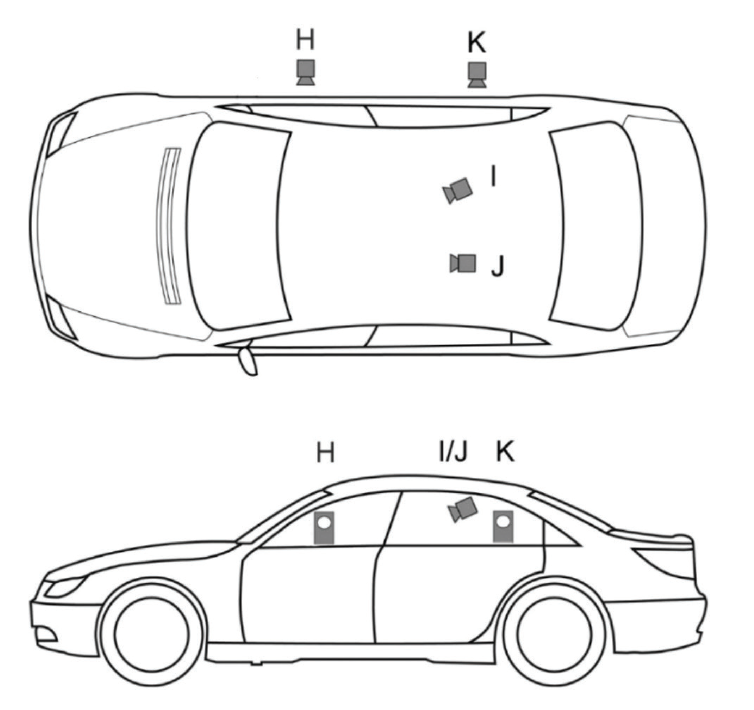
在特定的 IIHS 测试中,所需高速摄像机可达 16 台,每台高速摄像机捕捉碰撞不同方面的图像。碰撞测试还具有工程目的,帮助汽车工程师进行设计测试,以及独立的安全气囊和部件测试,需要选择高速摄像机并设定位置以收集所需信息。
汽车碰撞测试高速成像
全面解决方案

以下高速摄像机具有快速帧率、高像素分辨率,结构紧凑且坚固,在汽车碰撞测试的车载拍摄和地面拍摄中表现出色:
- Phantom Miro C320 和 C320J 体积小、 耐用、感光度好,非常适合碰撞测试车载摄像。这两种高速摄像机可承受高达 170G 冲击力,配有内置备用电池,确保因冲击断电时仍能捕捉并保存测试图像。该高速摄像机能以 1920 x 1080 的像素分辨率和 1,400 fps 的速度捕捉图像。- Miro C210 和 C210J 结构坚固,在狭窄车内空间摄像表现优异。其 130 万像素传感器结构紧凑,5.6 微米像素,12 位深度,可高速捕捉细节丰富的图像。与C320 一样,C210 和 C210J 也配备内置电池和闪存,保护关键数据。这两种高速摄像机能以 1280 x 1024 的像素分辨率和 1,800 fps 的速度捕捉图像。
- Phantom Miro N5 仅 1 英寸立方体大小,是 Phantom 高速摄像机当中体积最小的,因此非常适合用于高要求的碰撞测试车载摄像。该高速摄像机包含三个可更换组件,包括配备 50 万像素传感器的高速摄像头、CXP 电缆和 Miro N-JB 底座。
- Phantom VEO 440 配有 4 百万像素传感器,适用于碰撞测试地面拍摄,能提供高分辨率、摄像覆盖范围更大、细节更丰富。有多种镜头可选,包括带电子镜头控制的 F 卡口、C 卡口和佳能 EF 卡口镜头。该高速摄像机能以 2560 x 1600 的像素分辨率和 1,100 fps 的速度捕捉图像。
碰撞测试与高速数据采集
在碰撞测试中,高速摄像机不一定单独使用。为了描述碰撞测试的各个方面,汽车工程师传统上依赖加速度计和其他模拟和/或数字传感器。如今,借助 Phantom 的成果,能更方便地把高速成像融入上述组合中,Phantom 高速摄像机已经能够与第三方数据采集 (DAQ) 系统直接连接,碰撞测试工程师得以同时收集模拟数据或数字数据以及视频数据。工程师可运用此功能,在 Phantom 高速摄像机控制 (PCC) 软件中把同步的视频和数据可视化,获得观察对象的新视角。
车载测试—
摄像机设计、视场和景深
碰撞测试的具体成像目标决定了高速摄像机的位置,包括车载位置(即在汽车或拖车内部位置),还是地面位置。
根据其在车内的位置,车载碰撞测试需要小型、轻便、耐用的摄像头。此种高速摄像头可轻松安装在狭小的空间中,同时反复承受 G 力。例如,Phantom Miro C320 高速摄像机设计可承受高达 170G 冲击,且已经过测试。其结构紧凑而坚固,重 1.2 磅,符合 MIL-STD 202G 规格要求,标配承受 100G 冲击,但大多数汽车碰撞的冲击介于 30G 到 75G。
小型专用高速摄像机还可用于狭小空间,如车门面板内或制动踏板附近。只带有传感器的摄像头连接到更大、独立的控制底座上,得以实现体积小、重量轻的特性。例如,Phantom Miro N5 高速摄像头只有 1 英寸立方体大小, 通过 CXP 电缆连接到控制底座上,图像能够即时、安全存储。
小型专用高速摄像机具有以下优点:
- 可设置在车内几乎任何位置,包括发动机和底盘- 重量轻,便于使用宽胶带或魔术贴安装
- 碰撞存活率高,因为微型物体常常能免遭破坏
小型专用高速摄像机也有不足之处。首先,连接电缆裸露,可能出现故障。降低风险的一个方法是,确保图像能够通过 CXP 电缆实时下载到控制底座。此外,传感器、像素通常很小,需要补充光线。可以有针对性地补充 LED 照明。
车载测试常在照明方面受到限制。为克服这一挑战,需要选择动态范围出色的高速摄像机,例如,能让技术人员观察到制动踏板上黑影的细微差别,或安全气囊白色阴影的细微差别。
PS
碰撞测试车载高速摄像
还需注意下列事项:
NO.1 视场 (FOV)
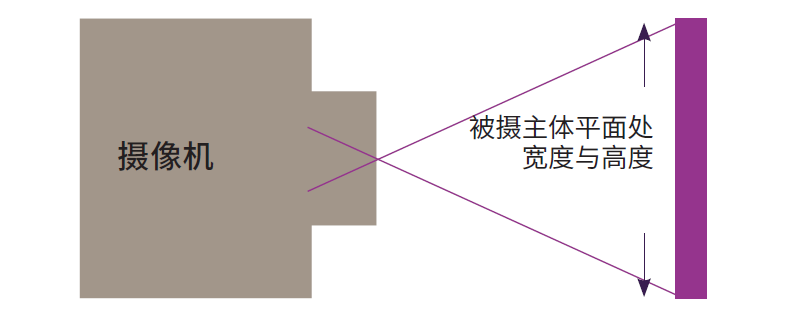
由于高速摄像机安装位置与目标物体非常近(可能是碰撞测试假人、仪表板、安全带等等),技术人员需要使用宽 FOV 摄像机。FOV 取决于多个变量,包括镜头选择、录制分辨率以及摄像机与焦平面间的距离。
例如,通过 Vision Research 的在线镜头计算器得知, 如需 5 英尺视场,Phantom Miro C320 设置为全分辨率 (1920 x 1080),则需水平焦距 18 毫米、垂直焦距 10.72 毫米的镜头。如果摄像机位置往远伸 7 英尺,则需水平焦距 26.55 毫米、垂直焦距 15.01 毫米的镜头。一个变量的变化会导致其他变量变化。
由于传感器尺寸不同,所需摄像机型号可能会不同,镜头格式必须与传感器格式匹配。
NO.2 景深 (DOF)
虽然景深应足够深,以便技术人员清楚观察汽车各部分,但光线方面有所妥协。光圈系数较高时,对焦深度更大,但图像也较暗。镜头的 f-stop (光圈系数)设置到最高,可获得最大景深,对应最小开口。反之,f-stop 系数越小,光圈越大,景深较浅,图像更亮。为获得足够的景深,补充光线是关键。因此,高强度 LED 灯对汽车碰撞测试非常重要,这些灯通常是根据区域光线需求定制的。
虽然高速摄像过程中通常需要照明,但高速摄像机的设计可以让其尽可能多地利用光线,以减少这方面的需求。例如,Phantom Miro C320 集成了 CMOS 传感器, 结构紧凑,10 微米像素,感光度更高,它的 ISO 值也较高:10,000D(单色)和 2,000D(彩色),这意味着捕捉高质量图像所需补充的光线更少。
车载测试镜头注意事项
碰撞测试车载高速拍摄通常使用 C卡口镜头,这些镜头通常价格实惠、体积小,能够承受重复冲击,因此是车载碰撞测试的理想之选。
镜头的选择取决于高速摄像机的传感器格式,传感器格式根据其分辨率和像素大小计算,传感器尺寸以及相应的图像圆尺寸通常以公制单位测量,但以英寸单位表达。示例如下:
- 在 2/3 英寸传感器格式中,对角线为 11 毫米,即需要的最小图像圆尺寸为 11 毫米的镜头覆盖 2/3 英寸格式传感器。- 在 1 英寸传感器格式中,对角线为 16 毫米,即需要的最小图像圆尺寸为 16 毫米的镜头覆盖 1 英寸格式传感器。
- 在 4/3 英寸传感器格式中,对角线为 22.5 毫米,即需要的最小图像圆尺寸为 22.5 毫米的镜头覆盖 4/3 英寸格式传感器。
高速摄像机传感器尺寸及相应镜头。
例如,以全分辨率使用 Miro C320 需要 4/3 英寸镜头,而使用 Miro C210 则需 1 英寸镜头。使用大于传感器要求的镜头也可覆盖传感器,但需计算“裁切系数”。例如,在 2/3 英寸传感器上,20 毫米 4/3 镜头与 40 毫米镜头的覆盖范围相当。更重要的是,避免使用相对传感器过小的镜头,因为这种组合会使图像边角变黑,即出现晕影。例如,2/3 英寸 C 卡口镜头应安装在具有 2/3 英寸传感器的摄像机上,但若连接到 1 英寸传感器摄像机上则会导致晕影。
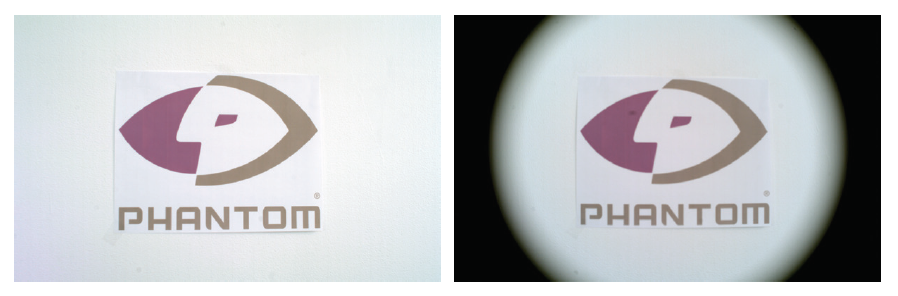
无晕影与有晕影
以下镜头也用于车载碰撞测试:
NO.1 S (M12) 卡口镜头
S 卡口镜头是小型专用摄像机的理想之选,因为其体积非常小,通常价格实惠,有多种焦距可选。操作员将这些镜头旋入靠近传感器的摄像机,然后用锁紧螺母锁定,实现聚焦。
NO.2 微型4/3 (MFT) 镜头
MFT 镜头是新开发的高成本效益替代品。可替代大型摄像机传感器高清成像所需的大型 4/3 英寸镜头。
镜头计算示例:
从肩膀上方捕捉安全气囊应用过程
要在此方案中选择合适的镜头,首先需要考虑观察对象(包括其与摄像机的距离)以及录制分辨率,计算选择镜头的公式较为麻烦。例如,此为 Phantom Miro C320 高速摄像机的计算公式:
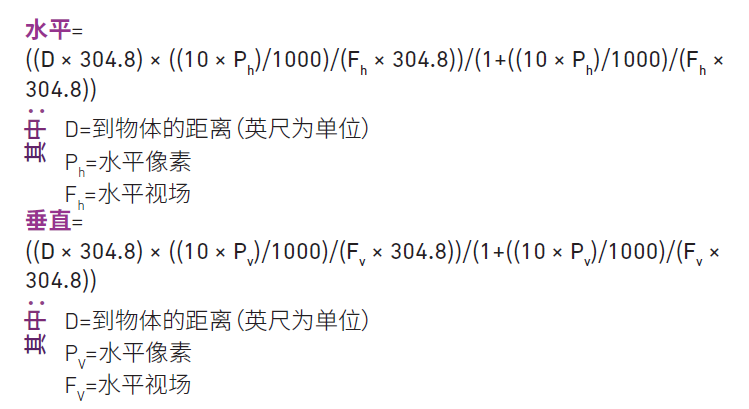
然而,PHANTOM网站上提供免费的镜头计算器,让选择更简便。此计算器专为计算 Phantom 高速摄像机使用的定制传感器而设。
在此例中,我们希望 Phantom Miro C210 高速摄像机能越过驾驶员的肩膀,拍摄到约 4 至 5 英尺远处的安全气囊。首先打开镜头计算器,选择高速摄像机型号;然后输入水平和垂直分辨率,因为我们希望观察安全气囊(这一范围较大),所以需要使用高速摄像机的 1280 x 1024 全分辨率。
然后,输入与拍摄的距离(6 英尺)、水平视场长度(2 英尺)和垂直视场高度(2 英尺);最后,选择“计算”,生成以下值:水平焦距 21.25 毫米、垂直焦距 17.04 毫米。
由于这两个数值相差较大,可在两个数字之间选择平均焦距,或者根据应用需求和偏好,偏向水平视场或垂直视场选择镜头。

PHANTOM官网提供的镜头计算器。
碰撞测试地面摄像注意事项
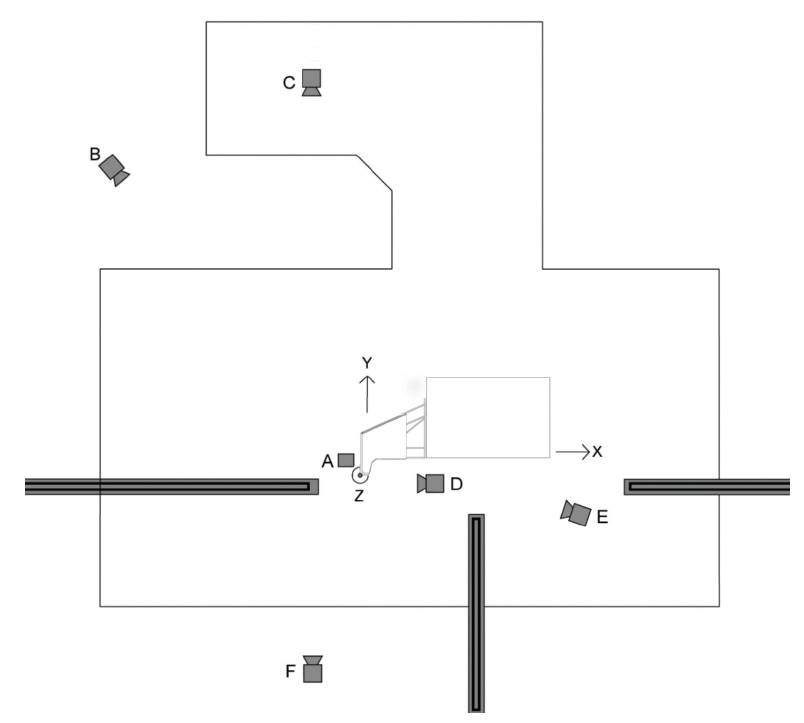
接下来,我们将讨论碰撞测试的地面摄像,包括安装远离车辆的高速摄像机(通常从 5 米到 15 米不等),从侧面、顶部、前方或底部捕获图像。例如,IIHS 的“小偏置正面耐撞性评估”包括以下坐标和六个地面摄像机的镜头焦距:
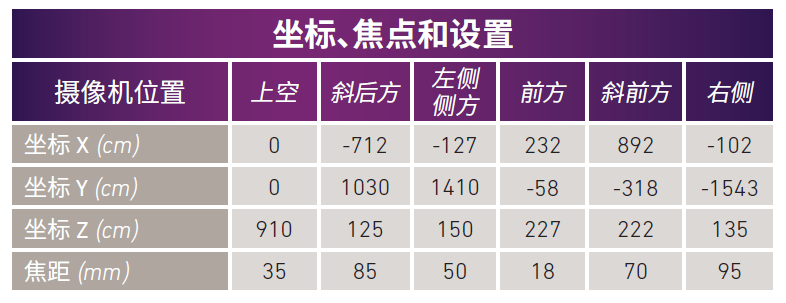
IIHS“ 小偏置正面耐撞性评估”的高速摄像机坐标、焦点和设置。
虽然地面高速摄像机成像过程的许多方面(包括镜头计算) 与车载高速摄像机相同,但确实存在一些关键的成像差异。例如,空间和光线更充足,因而摄像机尺寸和感光度要求没有那么高,由于其位于车外,地面摄像机的抗冲击能力也不必与车载摄像机一样强。
IIHS“小偏置正面耐撞性评估”的地面摄像机位置包括:上方 (A) 、斜后方 (B) 、左侧 (C) 、前方 (D)、斜前方 (E) 和右侧 (F)。
NO.1 分辨率
地面摄像机远离汽车,因此通常具有更大的传感器,分辨率也更高,尽管视场更大,工程师和技术人员仍能轻松跟踪并分析特定物体。由于待拍摄区域大于车载摄像,因此最适合的是分辨率更高的摄像机(400 万像素或更大)。
NO.2 视场
与车载测试类似,确定适当视场首先要确定拍摄对象与高速摄像机的距离。通常,视场应覆盖车前、车后的车长四分之一范围,是否部署一个或多个高速摄像机来捕捉碰撞图像取决于测试的要求。
NO.3 镜头选择
地面摄像机通常运用大型传感器,因此常通过可更换镜头卡口使用 F 卡口镜头。由于地面高速摄像机不直接参与碰撞测试,许多技术人员偏好一次性设置摄像机和镜头,然后保持不变。摄像机长期保持同一位置,无需调整镜头,从而简化工作流程,且能获得更一致的图像。
成像基本概念
一些关键成像概念,它们与碰撞测试高速摄像有关,了解这些相关概念可显著提高测试期间拍摄的图像质量。
NO.1 帧率和曝光时间
虽然大多数汽车碰撞测试的记录速度约为 1,000 帧/每秒 (fps),但许多高速摄像机的帧率要高得多,尤其是在分辨率更低的情况下。等式的另外一部分是曝光时间,或者说每一帧暴露在光线下的时间,即使在一帧内也可能发生快速事件,导致运动模糊。减少曝光时间可在更小、更具体的时间范围内捕捉运动,并消除运动模糊。但有一点需要权衡:减少曝光时间也会减少传感器获得的光线。
NO.2 分辨率
分辨率以像素为单位,指摄像机可以捕获的细节量,大多数高速摄像机的分辨率在 100 万至 400 万像素之间。
NO.3 动态范围
如需区分非常相似的阴影,动态范围(或图像中最暗和最亮色调之间的亮度级别范围)尤其重要。具有高动态范围的摄像机可以区分脚部空间中相似的黑色阴影,或在安全气囊区域区分相似的白色阴影。
NO.4 位深度
位深度是指摄像机用于表示单个像素灰度的位数。四位深度等于 16 种灰度,8 位深度等于 256 种灰度,12 位深度等于 4,096 种灰度。较高的位深度可提供更多细节,但同时也会生成更多数据。
在考虑碰撞测试车载摄像和地面摄像时,还需了解以下要点:
• 焦平面或被摄主体平面—焦距最清晰的图像区域。
• 焦距—镜头光学中心和传感器之间的距离(以毫米为单位)。镜头根据焦距区分。
• 视场—焦平面上图像的尺寸区域。
• 景深—焦平面前部、后部的可接受清晰度对焦的距离。
- 下一篇:在这里,沃尔沃汽车的安全是“撞”出来的!
- 上一篇:汽车芯片会缺货缺多久?



 广告
广告 编辑推荐




最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
