




 广告
广告





















































特斯拉驱动电机控制系统
2020-11-03 22:48:28· 来源:汽车电子与软件 作者:Ronald A. Belt

2020年6月,Belt博士对一起Model 3突然加速碰撞事故做出了独立调查。并认为特斯拉的汽车设计存在缺陷EDR数据、驾驶员证词和特斯拉自己对事件日志数据的分析之间
2020年6月,Belt博士对一起Model 3突然加速碰撞事故做出了独立调查。并认为特斯拉的汽车设计存在缺陷——EDR数据、驾驶员证词和特斯拉自己对事件日志数据的分析之间存在多个矛盾之处。为了解释这些不一致,Belt对特斯拉的驱动电机控制系统和制动系统的设计进行了检查。由此得出的结论认为,突然加速的原因在于车辆的制动系统及其与再生系统的相互作用机制。本文节选自此调查报告,感谢徐鸿鹄先生位对文章的翻译。
能量再生对于电动车来说,是非常核心的技术——车辆减速会使车辆的驱动电机充当发电机,为蓄电池充电。充电对于提高续航里程而言是必不可少的。
再生需要获得减速,减速一般需要踩制动踏板。但是如果再生仅由制动踏板控制,则将效率低下。因为相比油门踏板来说,制动踏板的使用频率很低,单靠踩踏制动踏板带来能量回收,远远无法达到延长续航里程的目的。如果刻意地踩踏制动踏板回收能量,则显得不够自然,而且驾驶员很容易疲劳并给道路交通制造危险。
于是,特斯拉的驱动电机系统,就被设计成单踏板驱动(OPD,one pedal driving)的形式。所谓的单踏板驱动,是指通过改变油门踏板的开度,同时控制加速和能量再生。

这张彩图清晰地显示了,特斯拉的单踏板驱动系统是如何工作的。这里大体有四种情况:
- 当油门踏板踩到地板上时(所谓的地板油),驾驶员将获得100%的加速度
- 油门踏板逐渐放开,驾驶员获得的加速度将变小
- 油门踏板进一步松开,有一个加速和减速平衡点,即车辆"滑行"的“最佳位置”
- 油门踏板完全松开时,驾驶员将获得最大的减速度和最大的电池充电水平,实现"最大"再生。
老款特斯拉的最大再生减速值约为0.2g,较新的特斯拉约为0.3g。
0.3g的减速水平让人感觉像带换挡杆的内燃机车在一档减速的感觉。
而单踏板驾驶的特点,让驾驶特斯拉与驾驶传统的燃油车的感受完全不同——只要保持把脚放在油门踏板上,扭矩可以在最大正扭矩和一定水平的负制动扭矩之间连续调节。如此一来,制动踏板将只有两种情况才用得到:
- 让汽车完全停下来
- 高于0.3g的水平进行紧急制动

上图显示了特斯拉驱动电机控制系统的第一步——通过这张标定好的踏板的Map图,将驾驶员设置的油门踏板位置转换为请求的电机扭矩值,在未标出数值的空白区域,扭矩值将通过插值的方法获得。系统内踏板的map图包括有一个二维查找表,可利用油门踏板位置信号来访问。
油门踏板位置信号,是通过双路油门踏板位置传感器得到的8-bit符号带大小整数。
扭矩值在特斯拉Model 3中是8-bit符号带大小整数,在特斯拉Model S和Model X中是16-bit符号带大小整数。扭矩值每100毫秒产生一次。
上图显示了,特斯拉驱动电机控制系统所执行的第二步骤:在这一步中给出的是驱动电机的扭矩Map图(即扭矩-转速TN图),它将所请求的扭矩值从踏板Map图转换成扭矩和"磁场磁通量命令",来驱动电机。该Map图也包括一个二维查找表,并通过踏板Map扭矩图和车辆速度进行访问。未标出数值的区域,可以通过二维插值得到。
- 加速"正象限"中的正向电机转矩命令可使车辆在向前行驶的同时从蓄电池中获取动力。在100%的电机转矩下,加速度的大小可能从0g到1g不等。绿色区域中的虚线显示了加速象限里的一个典型的加速度曲线,更一般地,它可以是任意的复合曲线。
- 制动"负象限"中的负电机转矩指令可通过为驱动电池充电来启用再生制动。这里受到多个因素的制约,只会用到红色区域,负象限的红色区域之外将不被采用。图上红色部分的虚线显示了制动象限中典型的制动再生路径。
将扭矩-转速图的红色部分放大,我们得到上面的图形。这里的限制因素有多个:
- 考虑到在路面摩擦系数下降时突然介入能量再生时,为了避免车辆不稳定,最大制动扭矩将受到-0.2g~-0.3g的最大减速度水平的限制。(左下方块构成的直线)
- 考虑到电机内部反向电动势back emf(反向电动势的大小与转速成正比,它的增大会逆转母线电压,当母线电流被截断时,电机将达到速度极限)的存在,电机受到最大速度的约束,尾部是截断的。为了进一步提高最大速度,可以采用诸如弱磁控制的技术,通过牺牲扭矩来换取高转速。(右侧的转速截断)
- 由于电机功率的限制,扭矩和转速的乘积受到约束,功率在弱磁控制区域保持恒定。(右侧方块构成的曲线)
- 在任何给定扭矩低于最大制动扭矩时,再生功率和制动扭矩跟随电机转速成比例减小。这里受最大再生功率的限制——最大再生功率必须保持在由蓄电池充电电路确定的某些最大值之内。(圆点构成的直线)
- 如果最大再生功率得到优化不再成为问题,最终将受到电动势emf的限制——保持在电池有效充电的某个最小值以上。(三角形构成的直线)
在最低emf电压以下,制动扭矩只有通过从电池中取电才成为可能,这在技术文献中称为反接制动(plug braking)。
这里请记住很关键的一点:电机仍能够在制动象限的所有区域运行——但只有通过限制给定速度下的扭矩请求,才能在限定区域(红色区域)内实现再生制动。在上述诸多限制所述的再生制动区域内,通过向驱动电机提供适当的扭矩和磁场磁通指令,可以获得任何期望的制动扭矩和再生功率。
再来考虑一个限制:当车速(与电机速度成正比)降低时,比如车速低于5mph时,交流感应异步电机将无法产生任何有效的制动转矩或再生功率。这是因为,转子的磁场受到感应电流的限制,而感应电流对于实际使用来说,实在太低了,无法形成足够强大的磁场。
但对于包含有永磁体的永磁同步电机来说,在低速下,电机仍能产生足够大的转子磁场,允许其在5mph以下运行。特斯拉在它们的Model 3型车中首次引入了这种永磁同步(PMSM)电机,代替此前的交流感应异步电机(ACIM),并计划在所有新版本的Model S和Model X生产中使用。
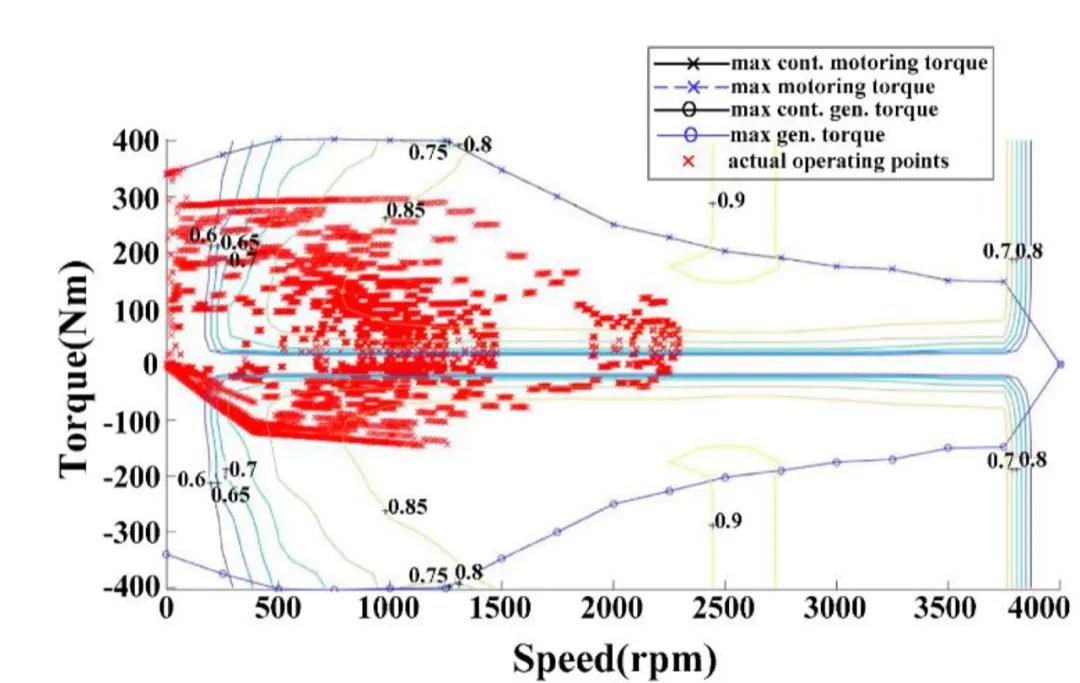
上图显示了在遵循典型城市驾驶循环时,驱动电机扭矩图中使用的操作点。操作点以红色显示,可以清晰地看出正加速扭矩和负制动扭矩。尤其左下角的低速时,制动力矩随车速的线性变化很明显。

如上图所示,这里采用的行驶循环,是参考美国EPA的标准城市测功机行驶计划(UDDS)给出的。
众所周知,许多特斯拉汽车都有双驱动电机。
如上图所示,画出了再生制动介入时,配备双驱动电机的Model 3中从100 kph减速到0 kph时的行为。当车速降低时,所有再生扭矩和功率仅由后驱动电机提供,从而产生最大可能的再生。对于软件更新为2018.42 v9的Model 3,最大制动扭矩对应于-0.3g加速度。
与预期一样,在低速时,再生扭矩和功率随转速线性下降。
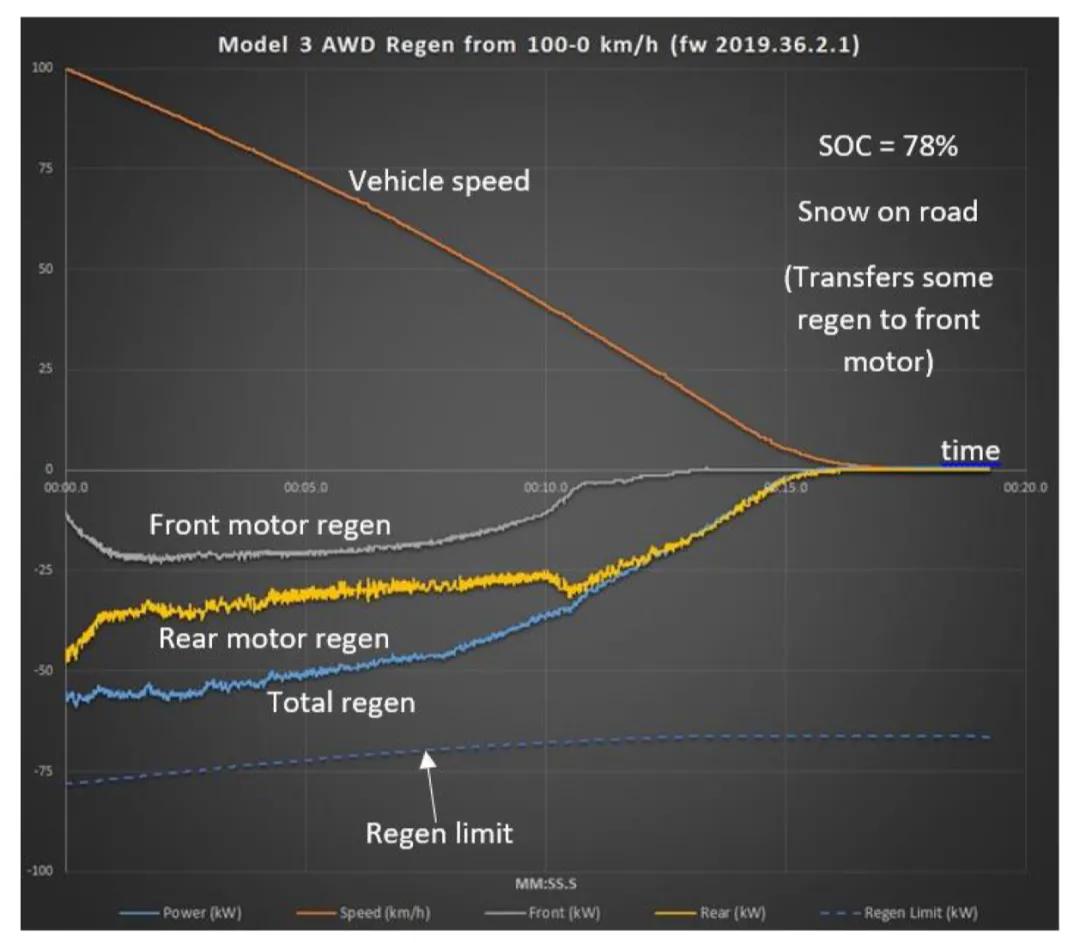
与上一张图不同,这张新图模拟了路面上有雪时,车辆轮胎和路面之间打滑的情况。当出现打滑时,会发现后部电机的制动力矩被转移到前电机上,两个扭矩之和与原始最大值附近保持一致。
为什么会这样设计呢?
这种行为的原因很容易理解——再生扭矩是一种制动操作,当由于雪、冰、雨或沙砾造成打滑时,将制动力矩施加到后轮上时,后轮会因缺乏牵引力而抱死。如果没有后轮牵引力,车辆可能会变得不稳定,并围绕其垂直轴(z轴)进入无法控制的危险旋转。因此,按照政府法规,车辆制造商必须要使用一定量的前轮制动,以防止这种不稳定性的发生。
当任何给定的车辆被制动时,减速使车辆前倾并重心前移,改变车轮上的制动力水平——当重量从后轮上卸下时,牵引力也会随之降低,并且在施加制动时,它们往往会在较低的减速值下更快地抱死。当然,将过多的重量转移到前轮上也会导致前轮抱死。

作为减速值、车辆质量、质心位置、轴距和道路摩擦系数的函数,可以计算前轮和后轮同时抱死时,前后轮上的水平制动力。如果我们将这些值绘制成一个平面上的曲线,以前后制动力为正交轴,就得到上图所示的理想I曲线。
- 在曲线I上方,后轮会先锁死,这是政府法规明令禁止的不安全情况。
- 在曲线I下方,除定义车辆最小后制动力的M曲线下的点外,任何操作点都被认为是安全的。
一系列斜线显示了减速值。β-曲线显示了与目前道路上大多数燃油车车辆中使用的跟线性制动比例阀有关的操作点。
利用这张图,我们就可以解释特斯拉Model 3的再生制动行为。对应图上的A点,处于减速值0.3g的状态,这里所有的制动都由后轮提供,这里是法规明令禁止的打滑时后轮首先抱死的危险区域——当后轮没有打滑在道路上具有100%的牵引力时,这是允许的。
如果出现任何打滑,为了使车辆在相同的减速值下保持稳定,必须在增加前轮制动力的同时减小后轮制动力,以便将工作点移动到图中I曲线上的点B(或以下)。在B点,前后制动力大致相等,分别为0.2g和0.1g。
下一个问题是,特斯拉Model 3的牵引力控制系统,是如何实现打滑情况下的制动再生分配呢?
来看牵引力控制模块的原理。我们知道,车辆扭矩指令生成功能包含此前展示的油门踏板Map图,该Map图将油门踏板值转换为车辆总扭矩请求。
最优转矩分配函数包含两个驱动电机扭矩-转速图,将车辆总转矩请求转换为两对(前后各一)电机扭矩和磁通指令。最佳扭矩分配是在电机最有效的工作点运行,以节省电池电量。
对于某些操作点来说,仅使用一台电机,车轮不打滑的情况下,当然提供可接受的车辆稳定性。当出现车轮打滑时,牵引力控制系统将两个扭矩从最佳扭矩分配功能出发,重新分配为两个新的前后扭矩,以便在I曲线当中或曲线下方工作,满足所需的车辆稳定性。
但这里还要注意两点:
- 首先,在加速和再生减速下,为牵引力控制提供前后扭矩重新分配并不能用做其它目的——比如为转向过度或转向不足提供更通用的差速(即横向)车轮打滑控制——这些更一般的车轮打滑控制功能通常由车辆的制动系统来提供。
- 其次,车辆(电机)扭矩指令生成功能有来自车辆稳定控制系统(VSC)的输入。
第二点似乎有点出乎意料——这赋予了VSC系统除油门踏板之外,还可以控制车辆的电机扭矩。这个独特的设计还被写进了特斯拉的专利当中(这不能算是一个错误,而是一种独特的构造)。这一点至关重要,我们还将在下一节特斯拉制动系统的讨论当中详细展开。
当前轮或后轮发生车轮打滑时,打滑车轴上的扭矩会减小,并转移到车轮打滑程度较低的另一个轴上。这个逻辑可以用数学方程表达为:
这两个方程式是从下面的Block Diagram当中抽象出来的:
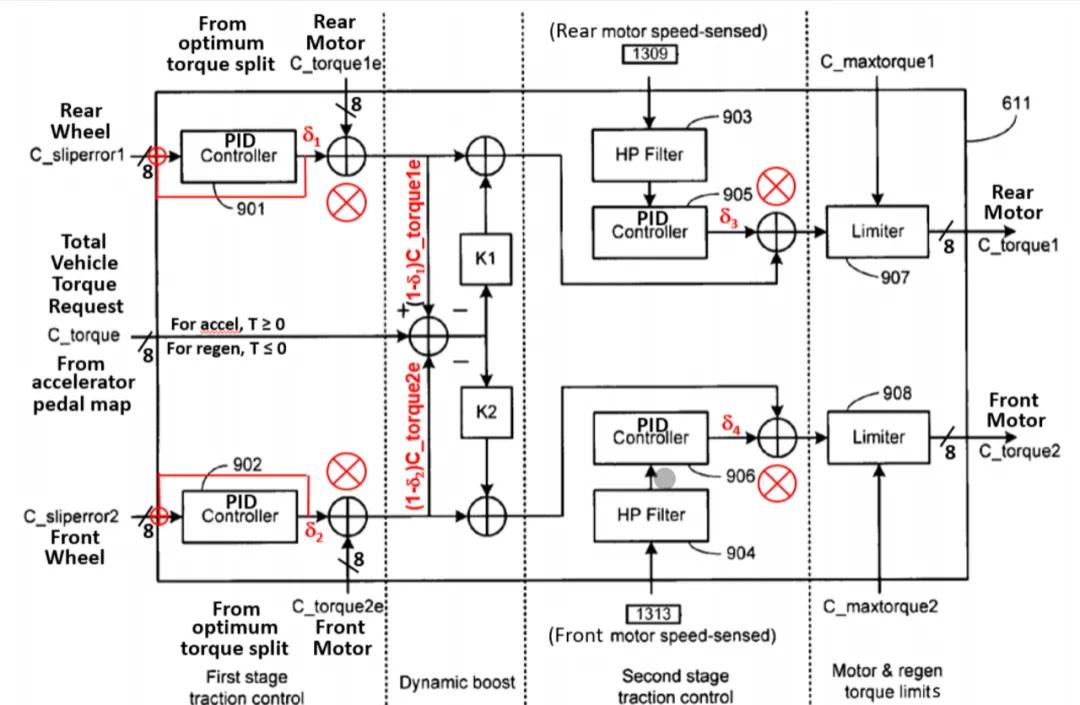
这个Block Diagram出现在特斯拉的专利当中,它展示了四处求和运算,但显然是不正确的,因为两个输入的单位不同(苹果加上橘子不会产生更多的橘子)。
这四个求和操作应被理解为调制操作(即乘法操作),其中扭矩T被脉冲宽度调制乘法操作)为(1-δ)*T,δ可以被理解为占空比,处于0和1之间,由PID控制器决定,它将当前滑移率驱动到目标滑移率:
- 对于直线驱动路径,目标滑移率为零
- 对于曲线驱动路径,目标滑移率为某个正常最小滑移率
最小滑移率可随车速和转向角而变化。即使没有打滑,转弯过程中车轮转速通常也会变化。滑移率由车轮速度和车辆速度之差除以两者中的较大者得出。PID控制器的输入是滑移误差,即当前转差率和目标转差率之间的差值,从查找表中获取。PID控制器将此滑移误差驱动至零,当存在车轮打滑时,该控制器将扭矩从某个减小的值(1-δ)*T驱动到不存在车轮打滑时的全值T。
当两个轴都不存在打滑的情况时,前后轴的δ都等于0:

与预期的一样,这表明输出扭矩C_Torque1和C_torque2仅与输入扭矩C_Torque1e和C_Torque2e相同。
如果一个轴有最大滑移,δ=1;另一个轴没有滑移,δ=0,我们得到:

在这种情况下:
- 不打滑的轴输出扭矩C_torque2,从C_torque 2e增加到C_torque 2e+K2•C_Torque1e,可以看作扭矩从车轴1传递到车轴2。
- 打滑的轴的输出扭矩C_torque1从C_torque1e减小到扭矩K1•C_torque1e,这里降低了滑移,但提供了动态增强部分的K1•C_torque1e。
再接下来,使用高通滤波器和第二个基于PID的反馈控制器,来独立地抑制电机速度快速扰动——在车轮过度打滑时,电机轴上的负载扭矩突然大幅度降低,一个或两个卡住的车轮在电机轴上突然大幅度增加负载扭矩,都可能导致电机速度快速扰动。
此外,在第一级和第二级之间,还有是一个瞬态扭矩增强前馈控制电路——即动态增强,它为每个轴增加一定的扭矩。增加的扭矩量与牵引力控制第一阶段后的驾驶员扭矩请求和组合扭矩指令C_torque之间的差值成比例。
比例常数K1<0和K2<0可为两轴调整为不同的值。前馈扭矩在不影响牵引力控制和车辆稳定性的前提下,提高了车辆的性能、对驾驶员需求的响应和驾驶性能。当扭矩要求完全满足时,前馈扭矩为零,有效车轮滑移率误差为零,最大扭矩限制无效。
当车轮打滑,并导致某个轴上的扭矩减小时,前馈控制的作用是对另一个具有更好轮胎-路面抓地力的车轴增加扭矩。当然,前馈控制也有副作用——向发生车轮打滑的车轴增加扭矩,但由于前馈路径中相对较小的增益,车轮滑移率误差反馈回路仍占主导地位,因此车轮滑移率误差仍会变小。
牵引力控制之后,最后一环是根据C_MaxTorque1和C_MaxTorque2发出扭矩指令。当扭矩为负时,该过程可确保电机再扭矩图的再生部分运行(红色部分)。这里输出的是扭矩指令C_torque1和C_torque2。
需要再次强调的是,这里仅提供牵引力控制,以响应可通过前后扭矩重新分配最小化纵向的车轮打滑。它不提供基于横向车轮打滑的稳定性控制功能——这些打滑将通过从左到右的扭矩重新分配来解决,如转向过度和转向不足。这些附加的稳定性控制功能必须由车辆的制动系统提供。
在讨论特斯拉的制动系统之前,必须还要提到一个特例:对于特斯拉的某些车辆,包括Model 3,只有一个后驱动电机。在这种情况下,再生扭矩不能从后驱动轮传递到前驱动轮,因为没有前驱动电机。
作者:Ronald A. Belt
翻译:徐鸿鹄



 广告
广告 



最新资讯
-
奇石乐持续推进全球碳中和战略
2026-01-23 16:47
-
吉利汽车,新公司落户湖北!
2026-01-23 16:12
-
直播|车载光通信技术路线及测试挑战
2026-01-23 13:05
-
重磅!工信部明确新车准入须开展30000km可
2026-01-23 13:05
-
【新品上市】电阻计RM3546:重新定义焊接质
2026-01-23 11:24
