




 广告
广告





















































基于多传感器融合的换道预警模型研究
2020-10-12 13:17:32· 来源:《汽车工程》 作者:杨明亮,寇胜杰,芦 勇,于春磊,江 昆,杨殿阁

针对基于单一传感器换道预警模型准确性和可靠性不足,且换道过程中自车加速度的确定未考虑真实场景因素等问题,提出了基于多传感器融合的换道预警模型,并在模型
针对基于单一传感器换道预警模型准确性和可靠性不足,且换道过程中自车加速度的确定未考虑真实场景因素等问题,提出了基于多传感器融合的换道预警模型,并在模型自车加速度的确定中充分考虑了自车车速、他车相对距离和相对速度等因素,优化了原有的换道预警模型,并采用碰撞时间和安全换道距离为评价指标制定换道决策规则。仿真和实车实验结果表明,基于多传感器融合的换道预警模型预警更加灵敏高效,符合道路使用和驾驶员操作要求,验证了多传感器在环境感知中的优势,证明了换道预警模型的有效性。
背景概要:ADAS传感器产业链发展优势显现
ADAS传感器产业链各环节涌现大批优秀国内厂家,竞争优势逐渐显现。传感器板块,中国专利占比高达41%,居全球首位。
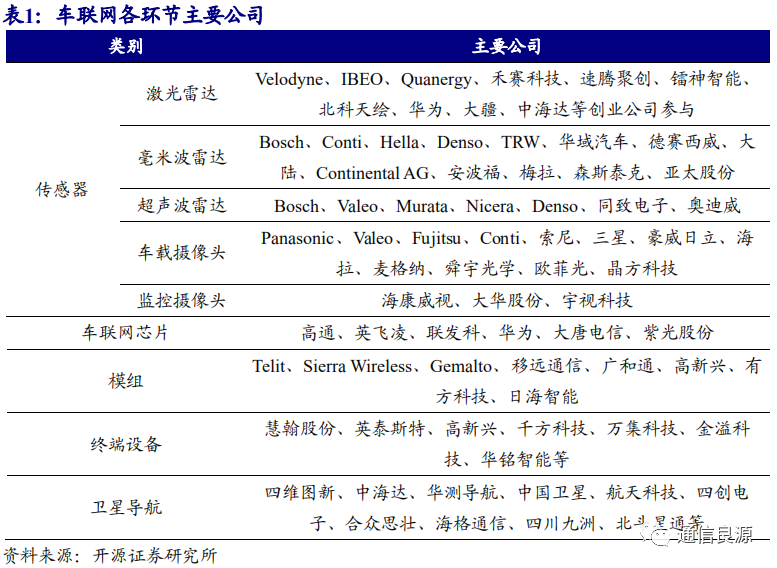
假设一:一个交叉路口配备1套RSU设备,2个高清摄像头、2个毫米波雷达和2个激光雷达;二类城市间高速公路,及城市内部快速路、绕城快速路,平均每隔1000m左右部署1套RSU路侧设备, 2个高清摄像头、2个毫米波雷达和2个激光雷达;三类高速公路收费站,每个高速公路收费站部署1套RSU路侧设备,平均4个出入口,每个部署1个高清摄像头、1个毫米波雷达和1个激光雷达;
假设二:激光雷达16线约2万元,32线约为4万元,一般配置于L4/L5级别自动驾驶车辆中;摄像头单目500元,双目1000元,一套系统平均2000元;毫米波雷达24GHZ为800元,77GHZ为3000元。当前RSU单价为1.1万/台,所有产品每年以5%价格下降。
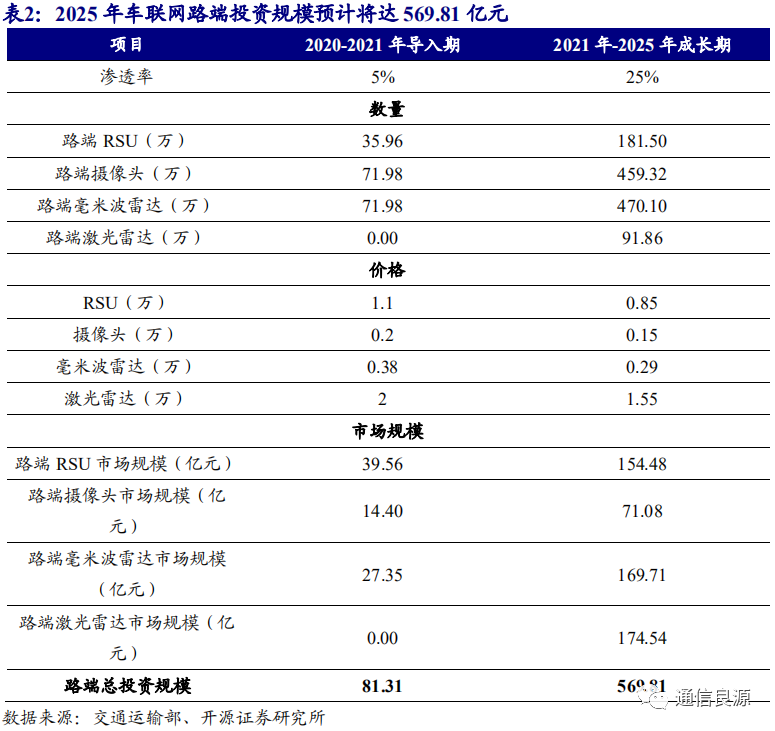
2025年RSU市场规模为154.48亿、摄像头市场规模71.08亿、毫米波雷达市场规模169.71亿、激光雷达市场174.54亿,合计569.81亿元。传感器市场发展迅速,对基于单一传感器换道预警模型准确性和可靠性不足,且换道过程中自车加速度的确定未考虑真实场景因素等问题,基于多传感器融合信息开发了换道预警模型,换道过程中自车加速度的确定考虑了自车速度、与他车相对距离和相对速度等因素的影响,有效地提升了换道预警的准确性和驾驶的舒适感。
具体配置步骤安排:
1 基于多传感器融合的换道预警模型构建逻辑
多传感器的配置、融合并进行环境感知是换道预警模型构建和决策机制的基础,换道预警模型构建逻辑如图 1所示。
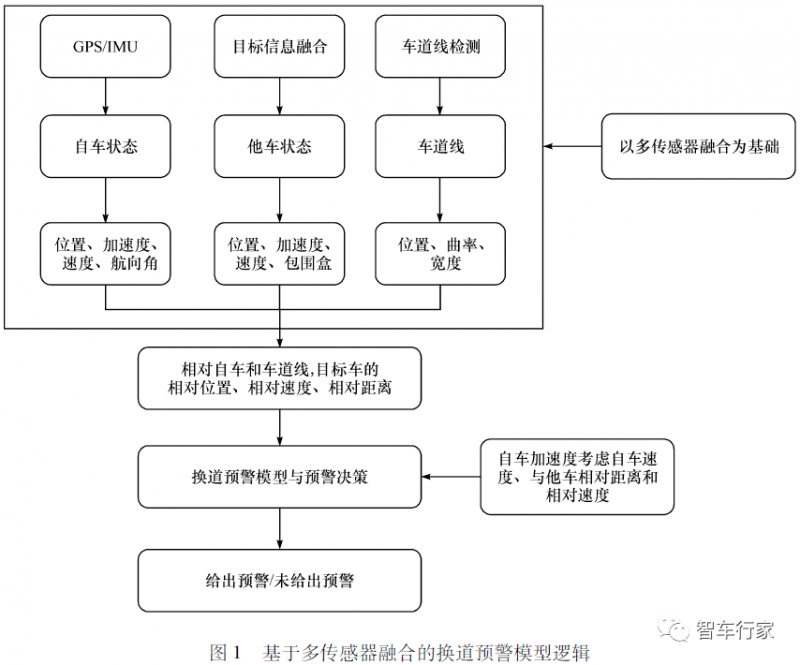
车道线检测模块获取道路的曲率、距离和宽度等信息;车载 GPS和惯性测量单元(IMU)的融合精确得到自车的位置和运动信息;目标信息融合模块借助长距和侧向毫米波雷达、相机、激光雷达等手段感知换道驾驶环境的多维信息。
2 换道预警模型构建的感知信息基础
采用的驾驶实验平台集成了激光雷达、相机、长距毫米波雷达、侧向毫米波雷达、差分GPS和 IMU。将多类传感器集成到统一的驾驶实验平台中,完成不同传感器的标定和融合,为车道线检测、自车状态和他车状态获取奠定了基础。不同类型传感器性能如表 1所示。
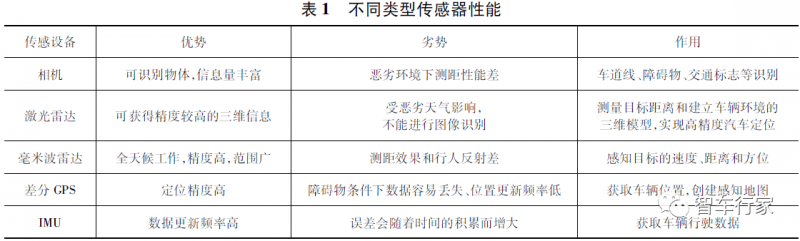
多传感器的融合集中了各种传感器的优势,提升了环境感知的精度和稳定性,以此为基础,本文中开发以下基础模块。
(1)车道线检测。采用相机和基于模型的车道线检测算法,包含车道线的提取、拟合、追踪和去伪4个模块,提升了车道线检测的准确性。
(2)通过IMU和差分 GPS的融合,实现自车状态信息的获取,其中差分GPS可实时进行车辆位置的高精度感知;IMU可实时采集车辆行驶的加速度和航向角,并根据采集数据直接积分出局部轨迹。将差分 GPS和 IMU融合后进行综合定位可以获取融合的、实时的、精度高的车辆定位信息。
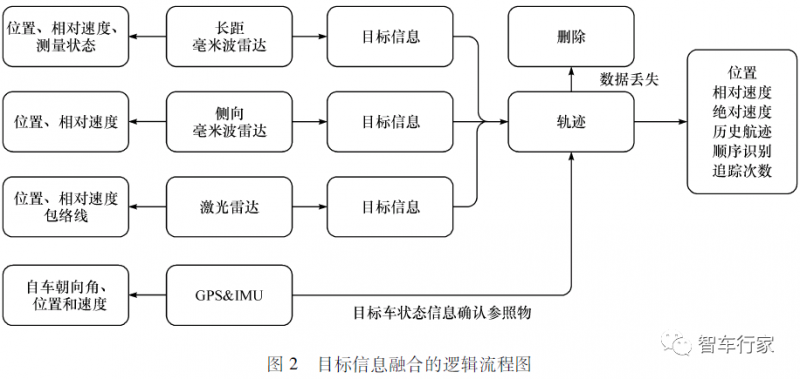
(3)他车状态信息的获取由长距与侧向毫米波雷达和激光雷达等传感器的融合和目标信息的融合完成。经过目标信息融合,不同类型传感器给出的目标信息不断创建并更新航迹,通过ROScallback的方式,不断串行维护航迹,为换道预警的实时决策与控制提供参考。目标信息融合的流程如图2所示。
3 基于多传感器融合的换道预警模型构建
3.1 换道场景分析
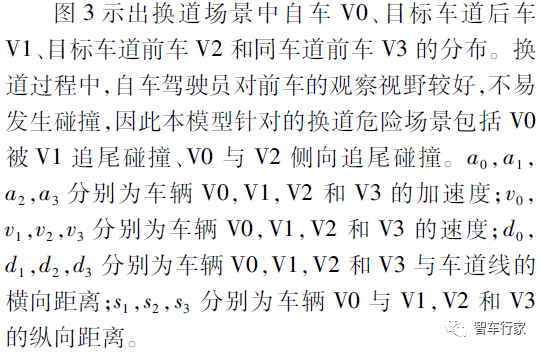
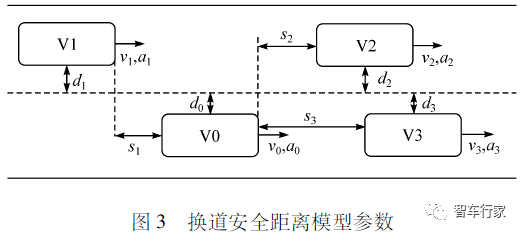
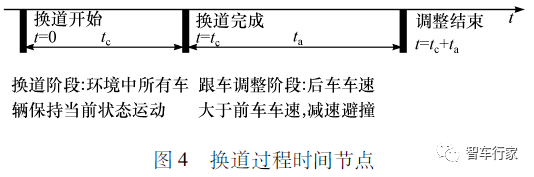
换道过程包含换道进行与跟车调整两个阶段。对整个换道场景运动行为做如下假设:
(1)周围车辆在换道过程中按当前速度匀速行驶,自车换道考虑自车速度、自车与目标车的相对距离和相对速度等因素,并以此确定加速度完成换道,换道完成后匀速行驶;
(2)换道完成瞬间,周围车辆开始进行跟车调整,即车速高于自车时进行制动减速,两车相对静止时,相对距离最小,称为碰撞临界时刻;
(3)碰撞临界时刻车辆的相对距离应大于心理安全距离。
根据以上假设,对周围的3辆车分别进行碰撞分析。各车时间上的状态变量如图4所示。
3.2 换道距离模型
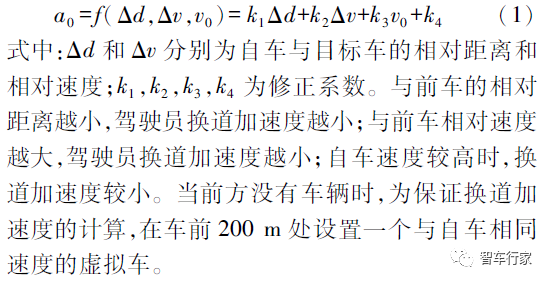
考虑到换道过程中影响自车加速的真实场景因素,构建了自车加速度模型:
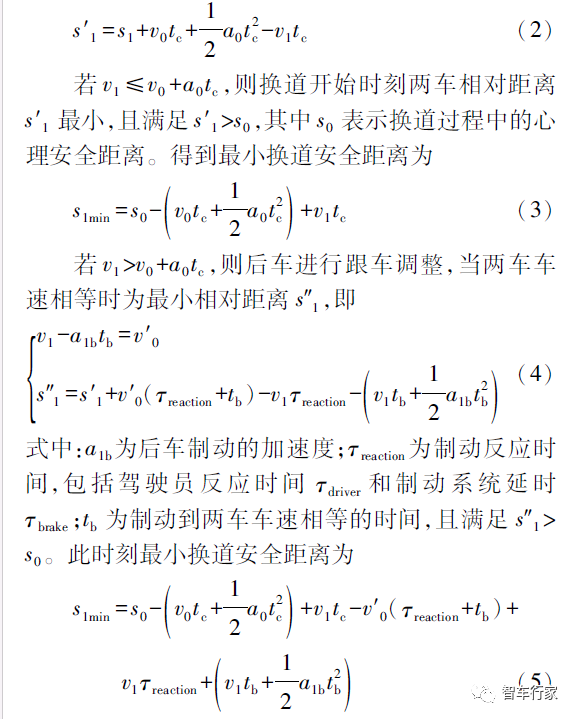
3.2.1 目标车道后车 V1
换道完成时刻,两车的相对距离:
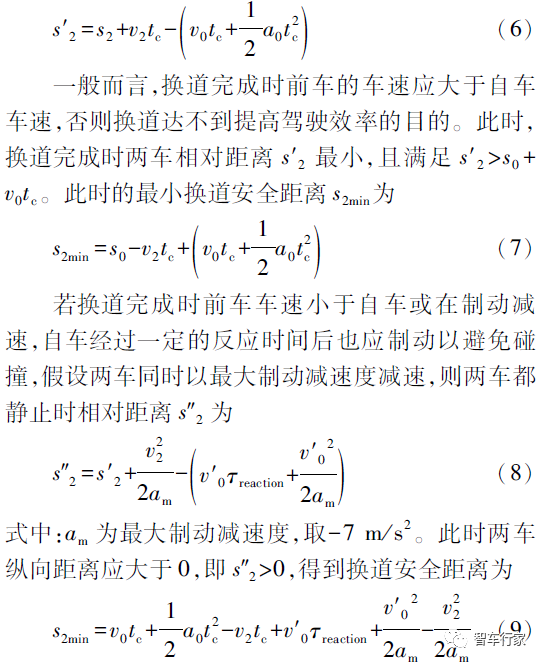
3.2.2 目标车道前车 V2
当换道完成时,两车的相对距离:
3.3 换道决策逻辑
参考国际标准ISO17387—2008中的 C型系统,在距离碰撞时间小于3.5s时,系统一定要给出预警。对于侧后方30m外的车辆,距离碰撞时间大于7.5s时,不建议给预警。
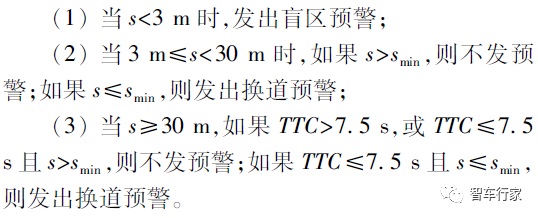
而对于在自车周围 3m内的目标,需要给出盲区预警。基于碰撞时间为TTC、两车相对距离为 s、两车最小安全距离为定如下换道预警规则:
4 仿真与实验分析
在 Matlab中仿真自车与目标车道后车、目标车道前车的安全距离,对比不同加速度和相对车速下的换道安全距离,验证加速度、速度和换道安全距离的内在关系,结果如图 5所示。
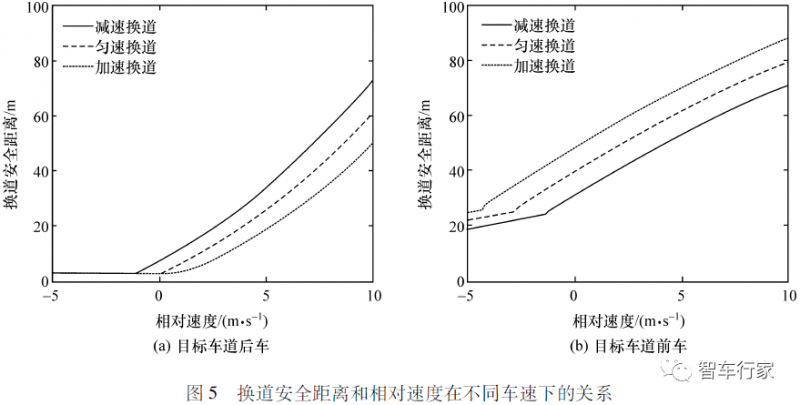
当目标车在自车侧后方,自车速度越大,与目标车的相对速度越大,因此减速换道需要的换道安全距离最大。自车速度大于后车速度时,只需两车相对距离大于 s0;当自车车速小于后车车速时,相对速度与换道所需的最小安全距离正相关。减速换道时,与后车的碰撞风险增加,换道安全距离增大。
当目标车在自车侧前方时,自车速度越大,与目标车的相对速度越大,因此加速换道需要的换道安全距离最大。当自车车速小于前车时,相对速度绝对值越大,碰撞风险越小;当自车车速大于前车时,相对速度越大,碰撞风险越大,换道安全距离相应越大。
4.2 实车实验
4.2.1 实车实验场景
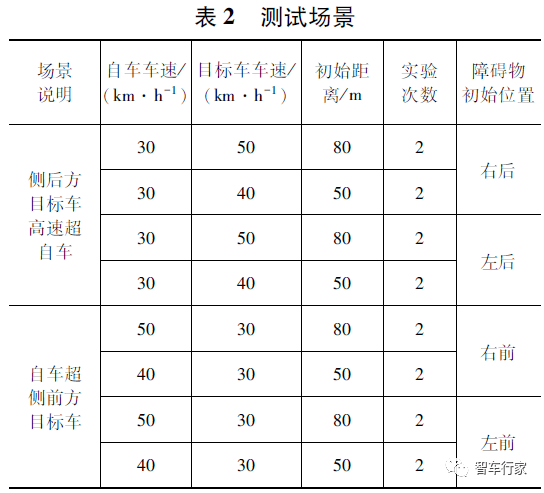
在不同车速、初始距离和相对车道位置场景下进行4种侧后方目标车高速超自车和 4种自车超侧前方目标车共8种场景工况测试。测试场景如表2所示。
4.2.2 实验结果展示
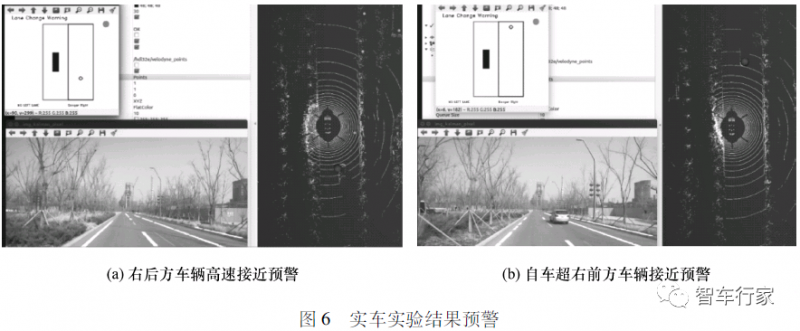
当右后方车辆高速接近,与前车间距小于系统设置的最小换道安全距离,会对向右换道造成威胁,系统给出预警;当与右前方车辆距离较近,自车向右换道后存在追尾风险,车辆间距小于系统设定的最小换道安全距离,系统也会给出预警。
不同场景下的预警如图 6所示。预警界面中方框表示车道,左侧方框中的方块表示自车,右侧方框中的圆点表示目标车,若有预警产生,则对应的车道矩形框会发生颜色变化,由于传感器故障原因,本文中只有 14组实验有效,且全部给出正确预警。
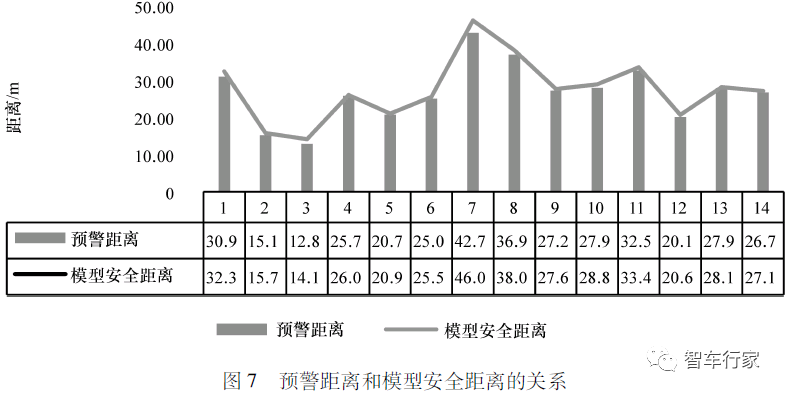
不同实验中系统初次预警时两车的纵向距离和换道安全距离如图 7所示,系统均能在实际相对距离小于换道安全距离时给出预警。
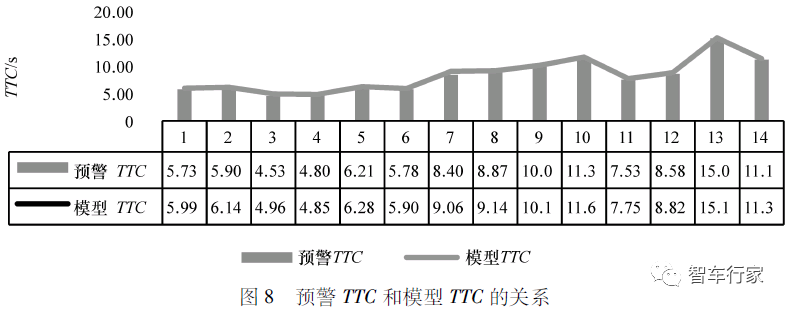
初次预警时刻的 TTC和换道安全距离对应的TTC如图 8所示。实际测试中预警 TTC比模型设计值略小,偏差均值为0.24s,这是由系统的离散性导致的。ISO17387—2008标准中要求换道预警系统的延迟不大于0.3s,本文中设计的系统符合标准要求。
4.2.3 实验结果对比分析
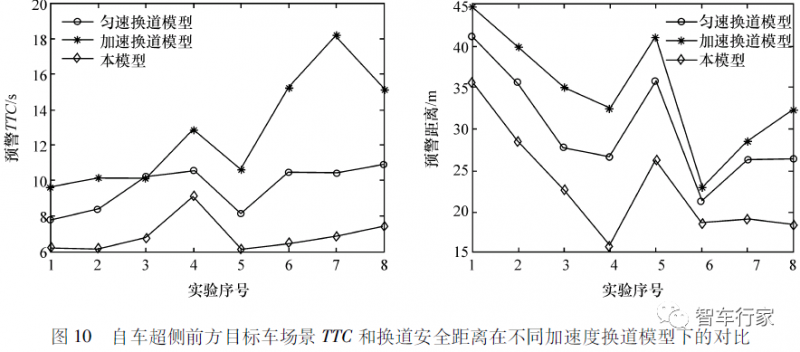
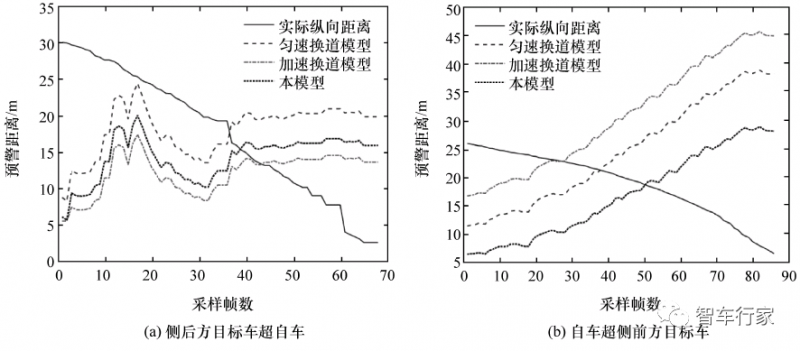
考虑到换道过程中的真实场景因素,本文中优化了换道预警模型,并与匀速、匀加速换道模型在不同场景下进行多组实验对比,结果如图9和图10所示。选取不同场景中典型实验对比了3种模型下实际纵向距离与预警距离的变化趋势,结果如图11所示。
在侧后方目标车高速超自车场景中,图 9显示相同测试条件下本模型 TTC和安全换道距离总体比匀速换道模型小,比匀加速换道模型大。
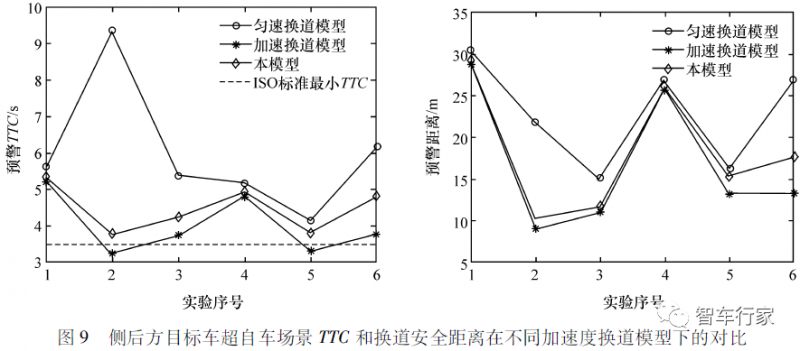
在加速换道模型中,两组实验预警时刻TTC小于 ISO标准中的最小值3.5s,换道行为更为激进,换道碰撞风险高,换道模型安全性不足;
匀速换道模型相对保守,换道安全距离和预警时间较大,会造成换道预警的安全性和准确性不足。因此,本文优化的换道模型更合理,同时兼顾了安全性和准确性。
在自车超侧前方目标车场景中,图10显示本模型比匀速模型和匀加速模型的TTC和预警距离小,且 3个模型都满足了标准要求。
当自车加速或匀速换道时,自车速度越大,与目标车的速度绝对值越大,TTC和预警距离越大,因此加速换道的 TTC和预警距离最大。本文优化后模型的 TTC和预警距离最小,表明该模型预警出现更晚,能够有效防止虚报警和误报警,提升报警的准确性。
在侧后方目标车超自车和自车超侧前方目标车场景下的典型实验中,图 11显示实际纵向距离和预警距离曲线相交时会给出预警,且采样帧数代表预警时间,帧数越大,报警越晚。图中显示的报警距离和TTC与图 9和图 10结果一致,验证了优化后模型在报警安全性和准确性方面的优势。
5 结论
基于多传感器融合可获取更全面准确的车道线信息、自车状态信息和他车状态信息,并以此为基础在换道过程中设计自车加速度时考虑了自车速度、自车和目标车相对距离及相对速度因素,完善了换道预警模型并提出基于换道安全距离和 TTC的换道决策规则。通过仿真和实车实验验证了模型的有效性。
相对于自车匀速换道、匀加速换道模型,本文优化后的模型安全距离和 TTC更加高效灵敏,满足道路高效使用和驾驶员的实际操作需求。该模型重点进行了实车实验,不同场景下的实车实验均给出了合理的预警,体现了多传感器融合和优化后模型的优势。今后模型优化还需要进一步考虑他车与自车动态信息的相互影响。
背景概要:ADAS传感器产业链发展优势显现
ADAS传感器产业链各环节涌现大批优秀国内厂家,竞争优势逐渐显现。传感器板块,中国专利占比高达41%,居全球首位。
假设一:一个交叉路口配备1套RSU设备,2个高清摄像头、2个毫米波雷达和2个激光雷达;二类城市间高速公路,及城市内部快速路、绕城快速路,平均每隔1000m左右部署1套RSU路侧设备, 2个高清摄像头、2个毫米波雷达和2个激光雷达;三类高速公路收费站,每个高速公路收费站部署1套RSU路侧设备,平均4个出入口,每个部署1个高清摄像头、1个毫米波雷达和1个激光雷达;
假设二:激光雷达16线约2万元,32线约为4万元,一般配置于L4/L5级别自动驾驶车辆中;摄像头单目500元,双目1000元,一套系统平均2000元;毫米波雷达24GHZ为800元,77GHZ为3000元。当前RSU单价为1.1万/台,所有产品每年以5%价格下降。
2025年RSU市场规模为154.48亿、摄像头市场规模71.08亿、毫米波雷达市场规模169.71亿、激光雷达市场174.54亿,合计569.81亿元。传感器市场发展迅速,对基于单一传感器换道预警模型准确性和可靠性不足,且换道过程中自车加速度的确定未考虑真实场景因素等问题,基于多传感器融合信息开发了换道预警模型,换道过程中自车加速度的确定考虑了自车速度、与他车相对距离和相对速度等因素的影响,有效地提升了换道预警的准确性和驾驶的舒适感。
具体配置步骤安排:
1 基于多传感器融合的换道预警模型构建逻辑
多传感器的配置、融合并进行环境感知是换道预警模型构建和决策机制的基础,换道预警模型构建逻辑如图 1所示。
车道线检测模块获取道路的曲率、距离和宽度等信息;车载 GPS和惯性测量单元(IMU)的融合精确得到自车的位置和运动信息;目标信息融合模块借助长距和侧向毫米波雷达、相机、激光雷达等手段感知换道驾驶环境的多维信息。
2 换道预警模型构建的感知信息基础
采用的驾驶实验平台集成了激光雷达、相机、长距毫米波雷达、侧向毫米波雷达、差分GPS和 IMU。将多类传感器集成到统一的驾驶实验平台中,完成不同传感器的标定和融合,为车道线检测、自车状态和他车状态获取奠定了基础。不同类型传感器性能如表 1所示。
多传感器的融合集中了各种传感器的优势,提升了环境感知的精度和稳定性,以此为基础,本文中开发以下基础模块。
(1)车道线检测。采用相机和基于模型的车道线检测算法,包含车道线的提取、拟合、追踪和去伪4个模块,提升了车道线检测的准确性。
(2)通过IMU和差分 GPS的融合,实现自车状态信息的获取,其中差分GPS可实时进行车辆位置的高精度感知;IMU可实时采集车辆行驶的加速度和航向角,并根据采集数据直接积分出局部轨迹。将差分 GPS和 IMU融合后进行综合定位可以获取融合的、实时的、精度高的车辆定位信息。
(3)他车状态信息的获取由长距与侧向毫米波雷达和激光雷达等传感器的融合和目标信息的融合完成。经过目标信息融合,不同类型传感器给出的目标信息不断创建并更新航迹,通过ROScallback的方式,不断串行维护航迹,为换道预警的实时决策与控制提供参考。目标信息融合的流程如图2所示。
3 基于多传感器融合的换道预警模型构建
3.1 换道场景分析
换道过程包含换道进行与跟车调整两个阶段。对整个换道场景运动行为做如下假设:
(1)周围车辆在换道过程中按当前速度匀速行驶,自车换道考虑自车速度、自车与目标车的相对距离和相对速度等因素,并以此确定加速度完成换道,换道完成后匀速行驶;
(2)换道完成瞬间,周围车辆开始进行跟车调整,即车速高于自车时进行制动减速,两车相对静止时,相对距离最小,称为碰撞临界时刻;
(3)碰撞临界时刻车辆的相对距离应大于心理安全距离。
根据以上假设,对周围的3辆车分别进行碰撞分析。各车时间上的状态变量如图4所示。
3.2 换道距离模型
考虑到换道过程中影响自车加速的真实场景因素,构建了自车加速度模型:
3.2.1 目标车道后车 V1
换道完成时刻,两车的相对距离:
3.2.2 目标车道前车 V2
当换道完成时,两车的相对距离:
3.3 换道决策逻辑
参考国际标准ISO17387—2008中的 C型系统,在距离碰撞时间小于3.5s时,系统一定要给出预警。对于侧后方30m外的车辆,距离碰撞时间大于7.5s时,不建议给预警。
而对于在自车周围 3m内的目标,需要给出盲区预警。基于碰撞时间为TTC、两车相对距离为 s、两车最小安全距离为定如下换道预警规则:
4 仿真与实验分析
在 Matlab中仿真自车与目标车道后车、目标车道前车的安全距离,对比不同加速度和相对车速下的换道安全距离,验证加速度、速度和换道安全距离的内在关系,结果如图 5所示。
当目标车在自车侧后方,自车速度越大,与目标车的相对速度越大,因此减速换道需要的换道安全距离最大。自车速度大于后车速度时,只需两车相对距离大于 s0;当自车车速小于后车车速时,相对速度与换道所需的最小安全距离正相关。减速换道时,与后车的碰撞风险增加,换道安全距离增大。
当目标车在自车侧前方时,自车速度越大,与目标车的相对速度越大,因此加速换道需要的换道安全距离最大。当自车车速小于前车时,相对速度绝对值越大,碰撞风险越小;当自车车速大于前车时,相对速度越大,碰撞风险越大,换道安全距离相应越大。
4.2 实车实验
4.2.1 实车实验场景
在不同车速、初始距离和相对车道位置场景下进行4种侧后方目标车高速超自车和 4种自车超侧前方目标车共8种场景工况测试。测试场景如表2所示。
4.2.2 实验结果展示
当右后方车辆高速接近,与前车间距小于系统设置的最小换道安全距离,会对向右换道造成威胁,系统给出预警;当与右前方车辆距离较近,自车向右换道后存在追尾风险,车辆间距小于系统设定的最小换道安全距离,系统也会给出预警。
不同场景下的预警如图 6所示。预警界面中方框表示车道,左侧方框中的方块表示自车,右侧方框中的圆点表示目标车,若有预警产生,则对应的车道矩形框会发生颜色变化,由于传感器故障原因,本文中只有 14组实验有效,且全部给出正确预警。
不同实验中系统初次预警时两车的纵向距离和换道安全距离如图 7所示,系统均能在实际相对距离小于换道安全距离时给出预警。
初次预警时刻的 TTC和换道安全距离对应的TTC如图 8所示。实际测试中预警 TTC比模型设计值略小,偏差均值为0.24s,这是由系统的离散性导致的。ISO17387—2008标准中要求换道预警系统的延迟不大于0.3s,本文中设计的系统符合标准要求。
4.2.3 实验结果对比分析
考虑到换道过程中的真实场景因素,本文中优化了换道预警模型,并与匀速、匀加速换道模型在不同场景下进行多组实验对比,结果如图9和图10所示。选取不同场景中典型实验对比了3种模型下实际纵向距离与预警距离的变化趋势,结果如图11所示。
在侧后方目标车高速超自车场景中,图 9显示相同测试条件下本模型 TTC和安全换道距离总体比匀速换道模型小,比匀加速换道模型大。
在加速换道模型中,两组实验预警时刻TTC小于 ISO标准中的最小值3.5s,换道行为更为激进,换道碰撞风险高,换道模型安全性不足;
匀速换道模型相对保守,换道安全距离和预警时间较大,会造成换道预警的安全性和准确性不足。因此,本文优化的换道模型更合理,同时兼顾了安全性和准确性。
在自车超侧前方目标车场景中,图10显示本模型比匀速模型和匀加速模型的TTC和预警距离小,且 3个模型都满足了标准要求。
当自车加速或匀速换道时,自车速度越大,与目标车的速度绝对值越大,TTC和预警距离越大,因此加速换道的 TTC和预警距离最大。本文优化后模型的 TTC和预警距离最小,表明该模型预警出现更晚,能够有效防止虚报警和误报警,提升报警的准确性。
在侧后方目标车超自车和自车超侧前方目标车场景下的典型实验中,图 11显示实际纵向距离和预警距离曲线相交时会给出预警,且采样帧数代表预警时间,帧数越大,报警越晚。图中显示的报警距离和TTC与图 9和图 10结果一致,验证了优化后模型在报警安全性和准确性方面的优势。
5 结论
基于多传感器融合可获取更全面准确的车道线信息、自车状态信息和他车状态信息,并以此为基础在换道过程中设计自车加速度时考虑了自车速度、自车和目标车相对距离及相对速度因素,完善了换道预警模型并提出基于换道安全距离和 TTC的换道决策规则。通过仿真和实车实验验证了模型的有效性。
相对于自车匀速换道、匀加速换道模型,本文优化后的模型安全距离和 TTC更加高效灵敏,满足道路高效使用和驾驶员的实际操作需求。该模型重点进行了实车实验,不同场景下的实车实验均给出了合理的预警,体现了多传感器融合和优化后模型的优势。今后模型优化还需要进一步考虑他车与自车动态信息的相互影响。



 广告
广告 



最新资讯
-
联合国法规R73对货车侧面防护装置的工程化
2026-03-09 12:14
-
联合国法规R72对HS1卤素灯摩托车前照灯的工
2026-03-09 12:13
-
《汽车环境风洞 雪模拟试验及评价方法》国
2026-03-09 10:56
-
《汽车空气动力学与声学风洞 流场校准规范
2026-03-09 10:56
-
电池耐久试验方法的工程逻辑:SRC循环与多
2026-03-09 10:55
