




 广告
广告





















































车载通信悄然变革 - CAN XL无缝对接Ethernet
2020-08-04 23:47:37· 来源:Vector维克多

CAN FD在市场推广实施尚未几年,第三代CAN总线CAN XL即将登场,技术变革之快让人怀疑人生。CAN XL的发展与推动源自近些年汽车电子的迅猛发展和技术需求激增,而

CAN FD在市场推广实施尚未几年,第三代CAN总线——CAN XL即将登场,技术变革之快让人“怀疑人生”。CAN XL的发展与推动源自近些年汽车电子的迅猛发展和技术需求激增,而非个别供应商的产品市场战略。特别是基于IP的车载Ethernet技术从根本上改变了汽车网络架构,直接导致基于服务(Service-oriented)通信与基于信号(Signal-based)通信在车内并存。本文将介绍CAN XL,其传输速率可达10Mbit/s,填补了CAN FD和百兆车载以太网(100base-T1)之间的“鸿沟”。
当前汽车行业研发部门的新项目大多数集中在驾驶辅助(ADAS)、无人驾驶(AD)、新能源和互联化(IoT)等相关产品,致力于解决移动出行所面临的挑战。高性能感知系统如雷达、激光雷达和摄像头等是实现无人驾驶的先决条件,其产生的大量数据是多年来汽车应用中无法想象的。如何实时传输和处理这些感知数据是当前面临的挑战。因此,汽车行业引入车载以太网技术,包括被ADAS系统采用的100base-T1和1000base-T1,以及面向低端应用,正在开发中的10base-T1S(10Mbit/s)。
面向服务的通信通常以Ethernet和IP技术承载,应用程序基于数据和服务来实现,并不关心服务由谁提供。因此需要动态建立服务提供者(Provider)和服务消费者(Consumer)之间的连接。与此同时,能够实现变长数据结构序列化传输是服务通信的另一大优势。例如用于感知融合计算的传感器数据是系统在运行时才产生的大量数据,这些数据无法静态映射满足应用需求,因此通信系统必须支持数据动态序列化。
传统车载总线系统:完美实现控制任务
传统车载网络通常采用CAN/CAN FD和FlexRay实现基于信号的通信。在绝大多数车辆中,CAN以500kbit/s的传输速率应用在发动机管理和车身控制等系统中;CAN FD和FlexRay总线传输速率在1~10Mbit/s之间,被发动机管理、车身控制和底盘控制等系统采用;最后,应用在娱乐系统中的MOST总线通信速率在25~150Mbit/s之间。
降低系统的复杂性和成本永远是合理的诉求。从中长期来看,由于FlexRay和MOST的应用领域被Ethernet完全覆盖,因此FlexRay和MOST很可能被替换掉,只保留CAN和Ethernet,其中Ethernet工作在100~1000Mbit/s之间,用于娱乐、ADAS、车联网等系统中,而CAN/CAN FD工作在0.5~5Mbit/s之间,用于发动机管理和车身控制等系统中。未来工作在10Mbit/s的CAN XL或10base-T1S可能被底盘控制系统采用。
考虑到车载网络系统中大约90%控制器节点的通信速率在10Mbit/s以下,因此10Mbit/s的通信速率可覆盖广泛的应用领域。从音频到雷达和超声波传感器,再到底盘控制均可采用。从技术角度来看,文章开始提到数据的流传输和序列化以及面向服务通信,与此相对的是底盘控制应用以面向信号的通信为主。因此,CAN XL和以太网10base-T1S在该领域存在竞争。
CAN XL – 迄今最新、最快的CAN
CAN XL是对CAN和CAN FD的进一步扩展,并且在很大程度上遵循相同的运行原理。CAN报文分为仲裁场和数据场。尽管CAN XL在仲裁场使用500kbit/s至1Mbit/s的低速率,但数据场的传输速率却可提升至2Mbit/s至10Mbit/s。相对于CAN FD的可选速率切换功能,CAN XL强制执行速率切换。
此外,总线访问仍旧采用CSMA/CD(载波侦听多路访问/冲突解决方案),通过位仲裁解决总线访问权限问题。CAN XL遵循严格的优先级概念,允许更重要的消息无延迟地传输。CAN XL仅支持11位标识符ID,不再使用29位标识符ID。CAN XL凭借用于报头和帧以及格式检查的汉明距离6算法,确保数据传输的高可靠性,实际上胜过FlexRay和以太网的CRC功能。
然而,对于未来的应用而言重要的不仅仅是提高数据传输速率。CAN XL主要功能之一是数据场支持1~2048Byte的可变长度。在必要时,可将以太网帧打包为CAN XL消息,直接或间接通过CAN XL使用IP通信技术。
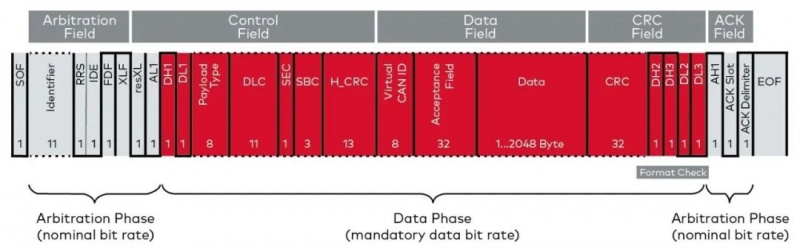
图1. CAN XL(当前开发阶段协议版本格式)
10base-T1S:总线型拓扑
新的10base-T1S同样使用10Mbit/s的传输速率,其中“ S”代表短距离或低速率,并且明确应用在车载系统中,其传输距离可达25米。10base-T1S不应与10base-T1L(L–长距离)相混淆,后者的最大距离可达1000米,通常用于工业应用。
10base-T1S的物理层使用非屏蔽双绞线,与现今其它基于交换机的以太网拓扑相比,10base-T1S拓扑是总线型的。所有节点均通过支线(最大长度为10cm)连接到主干。这将引起网络访问冲突问题:在以太网物理层(PHY)中,需采用循环控制的方法,允许通过PLCA(物理层冲突避免)进行无冲突的网络访问,从而保证每个网络节点的确定性响应时间,并在应用程序中提供实时功能。
基于这些特性,10base-T1S适用于传统汽车网络中的应用。10base-T1S和CAN XL都可作为100base-T1应用系统后端的网络总线通道。通过开关切换可实现10base-T1S耦合到100base-T1,而CAN XL则需要网关来连接。两种实现方式各有利弊,理论上可以并行存在。未来哪种通信系统将在这一相关领域中扮演主要角色取决于成本因素以及技术因素,最后但并非最不重要的一点是与CAN和CAN FD的兼容性。
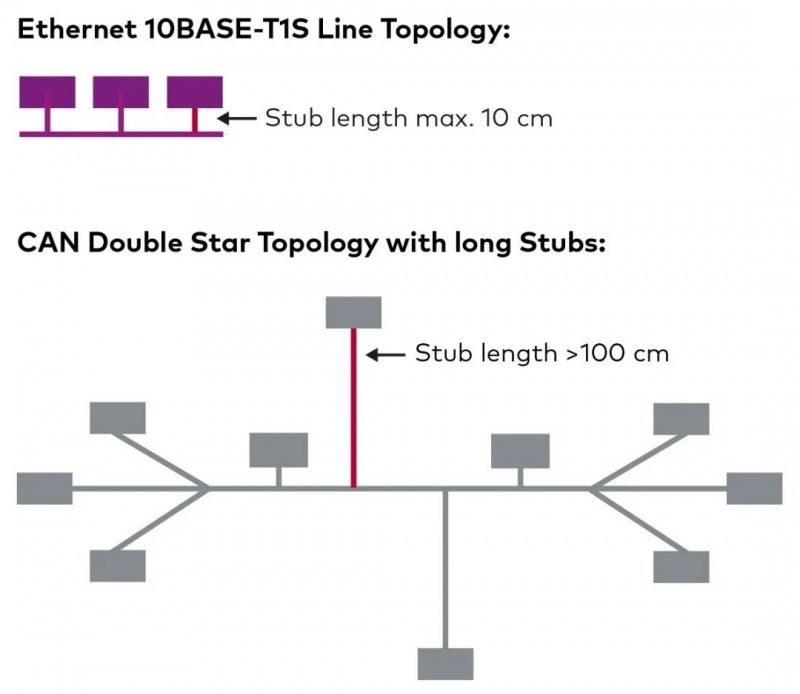
图2. 10base-T1S和CAN XL拓扑示意
分布式控制系统仍旧广泛采用:基于信号的CAN通信
支持CAN XL的一个有力论据是在车辆中基于信号的通信仍旧占据主导地位。对于典型的控制任务,基于信号的方法经历了近三十年的测试和验证。采用与CAN一致的优先级仲裁原则,同时满足必要的实时性要求。基于信号的通信的主要特征是预先定义通信矩阵,诸如温度、压力、速度或转速之类的信号始终表示相同的固定参数,该参数被映射到已建立的CAN报文中,并发送到总线上。
与10base-T1S相比,CAN XL能够耦合星型和线型拓扑构建更复杂的拓扑结构。由于10base-T1S不允许支线超过10cm,使得现有的CAN解决方案的可靠拓扑结构无法一对一地用10base-T1S网络代替。然而从CAN/CAN FD升级到CAN XL却非常灵活,这是在布线和线束方面投入大量的专业知识和开发时间的结果。
正是这种平滑过渡,使得关注紧凑型和中型汽车的OEM对采用CAN XL颇具兴趣。在这个大众市场中,短期内不会出现自动驾驶,更多的是驾驶辅助系统。没有雷达传感器和高分辨率摄像头等,就没有迫切需要基于以太网的网络通信技术,传统CAN仍将占主导地位。对于此类车辆,CAN XL在现有车辆架构的基础上提供了进一步开发的理想平台,无需重新设计线束、控制器和协议栈。与IP相比,CAN的协议栈更简单,因此可以使用体积更小,成本更低的微控制器。CAN XL的目标之一就是继续保持这一传统优势。
总结与展望
CAN XL传承自经典的CAN和CAN FD,并缩小了CAN/CAN FD与Ethernet之间的传输速度和耦合的差距。在合适的应用领域中,CAN XL可以采用更小巧更便宜的控制器。利用高达2048Byte的有效数据长度,CAN XL为将来传输以太网帧和利用IP通信提供所需的功能。在不久的将来,这意味着CAN XL和10base-T1S可以共同在基于信号的通信和面向服务的通信之间提供连接。通过对协议层进行适当的扩展,将为应用提供更丰富的可能性。Vector积极参与CAN XL相关标准制定工作,并已在CANoe和CANoe Option Scope中开发了CAN XL原型以及物理层解析示波器,后续我们将为读者进一步分享CAN XL的最新技术和Vector工具的相关动态。
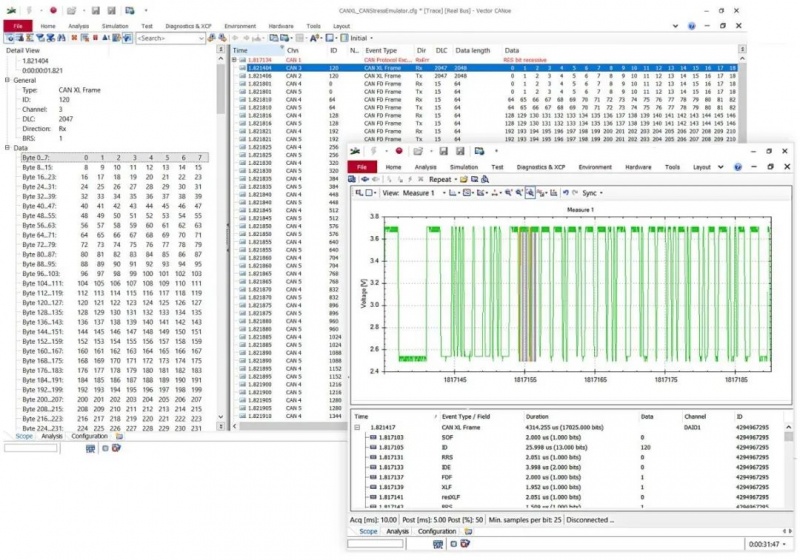
图3.基于CANoe的CAN XL原型和示波器原型



 广告
广告 



最新资讯
-
京东汽车与采埃孚售后深化战略合作,共筑商
2025-09-17 11:42
-
又一家主机厂成立
2025-09-17 08:17
-
R48对驾驶员辅助投影DAP的要求
2025-09-17 07:52
-
R48对紧急制动灯ESS的要求
2025-09-17 07:51
-
特斯拉如何实现FSD数据自动标注?
2025-09-17 07:50
