




 广告
广告





















































电动汽车制动能量回收控制策略研究
2020-05-28 23:16:15· 来源:沈阳理工大学 作者:王浩

本文根据制动强度来分配前后轮制动力以及电机制动力的比例,通过电机参与制动,进行能量回收。通过MAT -LAB/Simulink与cruise软件联合仿真,验证本文策略的有效
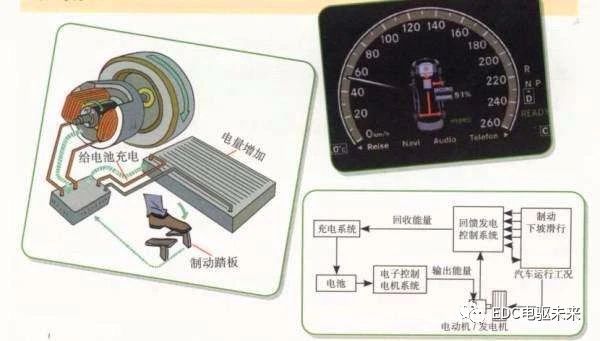
本文根据制动强度来分配前后轮制动力以及电机制动力的比例,通过电机参与制动,进行能量回收。通过MAT -LAB/Simulink与cruise软件联合仿真,验证本文策略的有效性。
1 制动能量回收控制策略
本文根据ECE法规要求以及路面附着系数限制,以制动强度为依据对前后轮制动力采取不同的分配策略,本文制定的制动力分配策略如图1所示。
图1中的绿色曲线为ECE法规曲线,红色曲线为理想曲线,紫色曲线为路面附着系数为0.8时的f曲线。在由这些曲线包围的区域内对电动汽车制动力进行分配。图1中线OA-AB-BC 为本文制定电动汽车制动时前、后轴的制动力分配线。当制动强度z<0.1时,仅由电机单独制动就可以满足制动要求,此时整车的制动力就等于电机的制动力,摩擦制动力为0。随着制动强度的增加,当制动强度大于A点强度时,需要摩擦制动力的介入,此时前后轮制动力按照AB线分配,过A点做ECE法规的切线,使切线到达B点。当制动强度大于B点时,为保证电动汽车的制动安全性,电机制动力不参与制动,电动汽车所需的摩擦力完全由摩擦制动力提供。
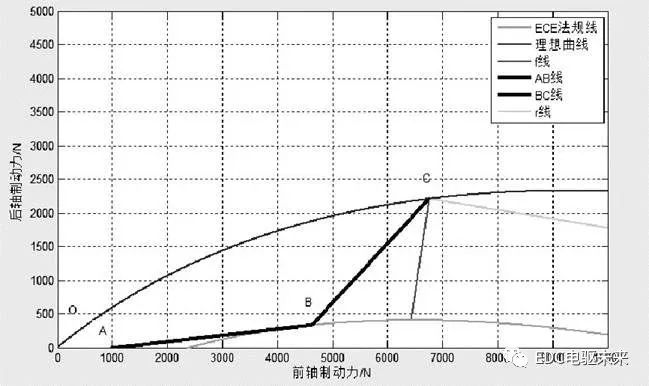
图1 前后轮制动力分配
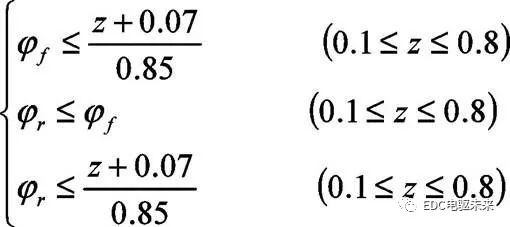
B点强度的确定:在汽车制动时,根据对汽车制动力分析,前后轴的利用附着系数的公式为:
式中:φf为前轴利用附着系数;φr为后轴利用附着系数;z为制动强度;L为轴距;a为前轴到质心的距离;b为后轴到质心的距离。汽车的基本参数为:m=1144kg;L=2.6m;a=1.04m;b=1.56m。
制动时前、后轮刚要抱死而还未抱死时,地面制动力达到最大。也就是说φf曲线和φr曲线都与φ=z直线越接近越好,制动强度与路面附着系数就越接近,就能充分发挥路面附着条件,汽车的制动性能就能提高。根据上述公式(1)和(2),可以得出让β取得一个合适的值就能使得上述曲线相接近。目标函数为
根据上述目标函数,对以下变量进行约束,得到约束函数如下:
 (3)
(3)将汽车基本参数代入,得到如下图2所的优化结果:
由图2可知,B点的强度为0.4426。
具体控制策略描述如下:当电动汽车行驶时,在电动汽车处于车速小于5km/h,池SOC值大于0.9,制动强度z大于0.8这三种情况任意一种情况下,电动汽车不进行能量回收,否则按照上述的制动力分配控制策略进行能量回收。
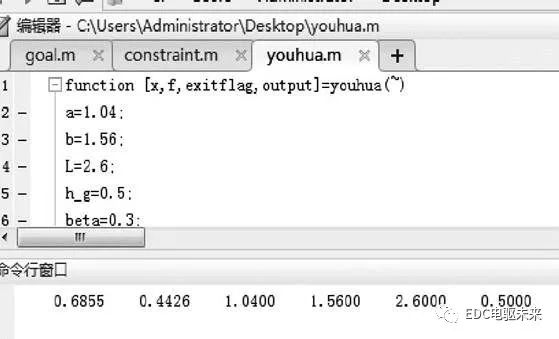
图2 优化结果
2 建模与仿真
通过AVL cruise和MATLAB/Simulink软件对建立好的电动汽车制动能量回收控制策略进行联合仿真,用simulink建立好的模型导入到cruise软件里进行联合仿真[6]。
电动汽车在FTP75工况下的能量回收的曲线如图3所示,可以看出能量输出为10112.04KJ,能量输入为1811.41KJ,能量回收率为17.91%。
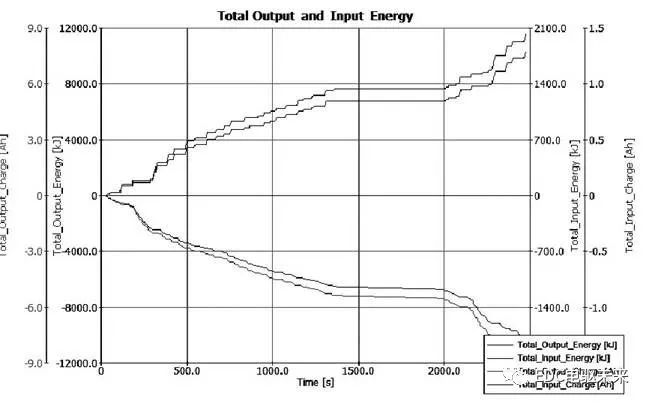
图3 能量输入输出曲线
图4和图5所示为电动汽车在FTP75工况下的前后轮摩擦力变化曲线。由图可知,前后轮摩擦制动压力呈现均匀变化,说明在此工况下电动汽车不仅有较为明显的能量回收,而且制动稳定性也比较好。
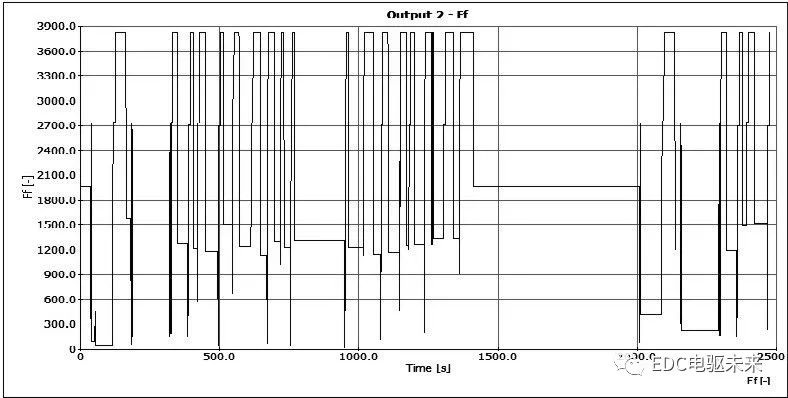
图4 前轮制动摩擦力
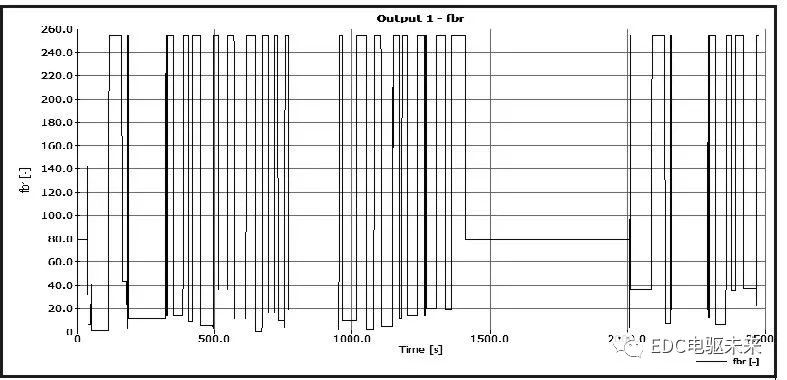
图5 后轮制动摩擦力
3 结论
本文设计的能量回收控制策略主要是根据制动强度的大小来合理地分配电机制动与摩擦制动以及前后轮摩擦力的比例,在ECE法规、I曲线和附着路面系数为0.8的时候的f曲线内的区域,尽量让电机进行制动,从而能回收更多的能量。通过在FTP75工况下仿真得出电动汽车加入本文的控制策略之后有能量回收,能量回收率为17.91%,并且制动稳定性良好。



 广告
广告 



最新资讯
-
市场监管总局:去年召回684万辆汽车,通过
2026-03-20 13:46
-
联合国法规R80对大型客车座椅及固定点强度
2026-03-20 12:18
-
千亩级基地开跑!比亚迪“5分钟充电”电池
2026-03-19 17:18
-
安全调试不踩坑!Workbench安全功能配置,
2026-03-19 17:10
-
联合国法规R89对车辆速度限制装置的工程化
2026-03-19 12:21
